

【技术分享】为何EtherCAT在运动控制总线中如此受欢迎?
电子说
描述
 什么是EtherCAT
什么是EtherCAT
EtherCAT(以太网控制自动化技术)是一个以以太网为基础的开放架构的现场总线系统,最初由德国倍福研发。EtherCAT为系统的实时性能和拓扑的灵活性树立了新的标准,是一种开放性的协议,开放标准由现在的EtherCAT技术组(ETG)管理。
 为什么选择EtherCAT
为什么选择EtherCAT
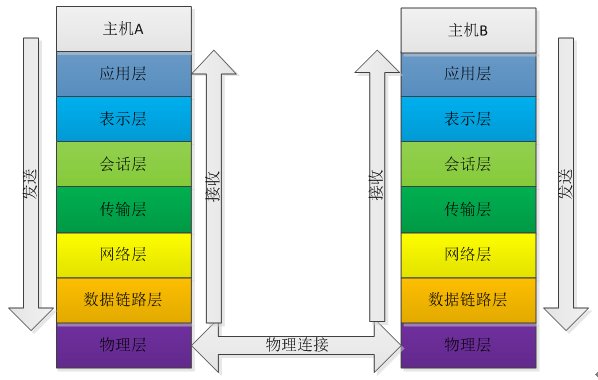 图1 OSI模型示意图
图1 OSI模型示意图RS232、RS485都属于ISO七层结构中的物理层,实现完整的通讯,需要加入数据链路层和应用层。RS232、RS485一般需要使用串口作为链路层对物理层进行指挥。RS485应用层协议通常使用MODBUS,CANOPEN也是应用层协议。CANOPEN和EtherCAT通常分别结合can、ethernet实现链路层和物理层,EtherCAT在ISO模型设计上也仅使用应用层、数据链路层、物理层。
在软件设计层次中,物理层向上走,将上一层帧再封装成特定帧后传输,通信过程将存在组包拆包的过程,越往顶层走帧格式越复杂,相比较其它的以太网协议,可见EtherCAT设计实现的精简之处,体现出了更优越的实时性。2. 优越的综合性能2.1 传输高效EtherCAT的物理层层中使用光信号进行传输,传输速率达100Mbit/s(100 base-Tx),且为全双工传输,相比于上述总线均为电气传输。RS232抗干扰能力差,RS485半双工,can一帧只能传输8个字节,而以太网传输一帧可以高达1514字节。以太网使用光纤为传输媒介,线束简洁,同时抗干扰能力更强,传输距离更远。
2.2 拓扑灵活
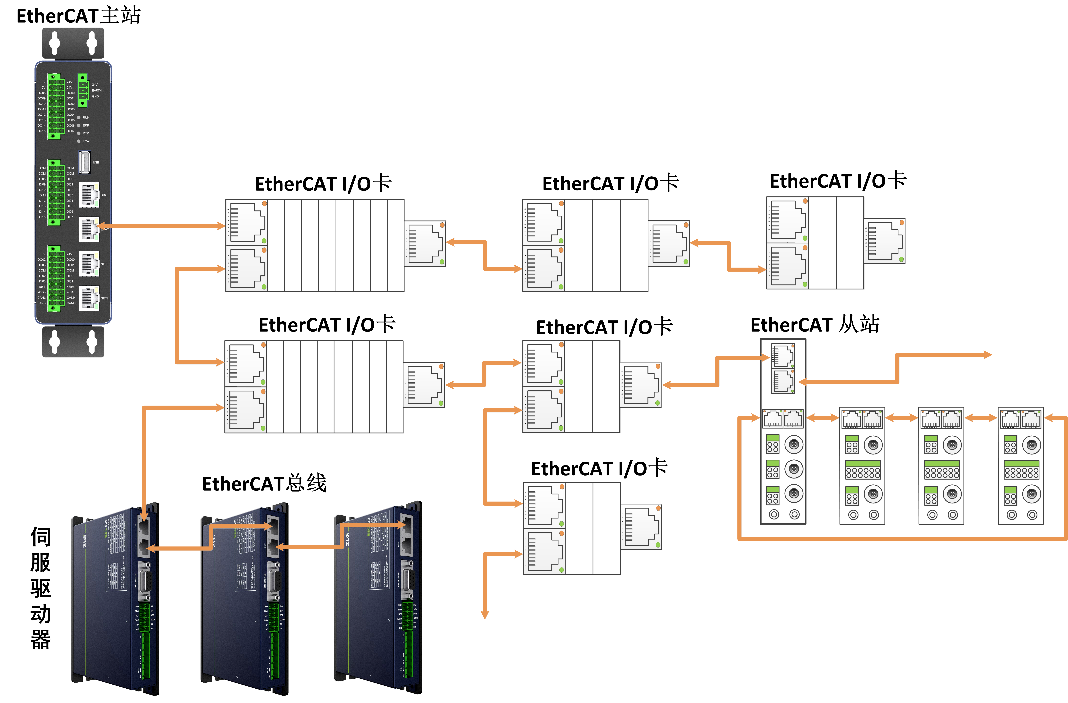 图2 EtherCAT 拓扑结构图
图2 EtherCAT 拓扑结构图EtherCAT符合以太网标准,支持多种拓扑结构:线型、星型、树型,以一种“逻辑闭环“的方式传播,灵活性更强。主站实现只需要一张普通网卡,不需要交换机与路由器的参与,解决传统以太网的交换机延时、堆栈延时、带宽利用率等问题。
2.3 时钟同步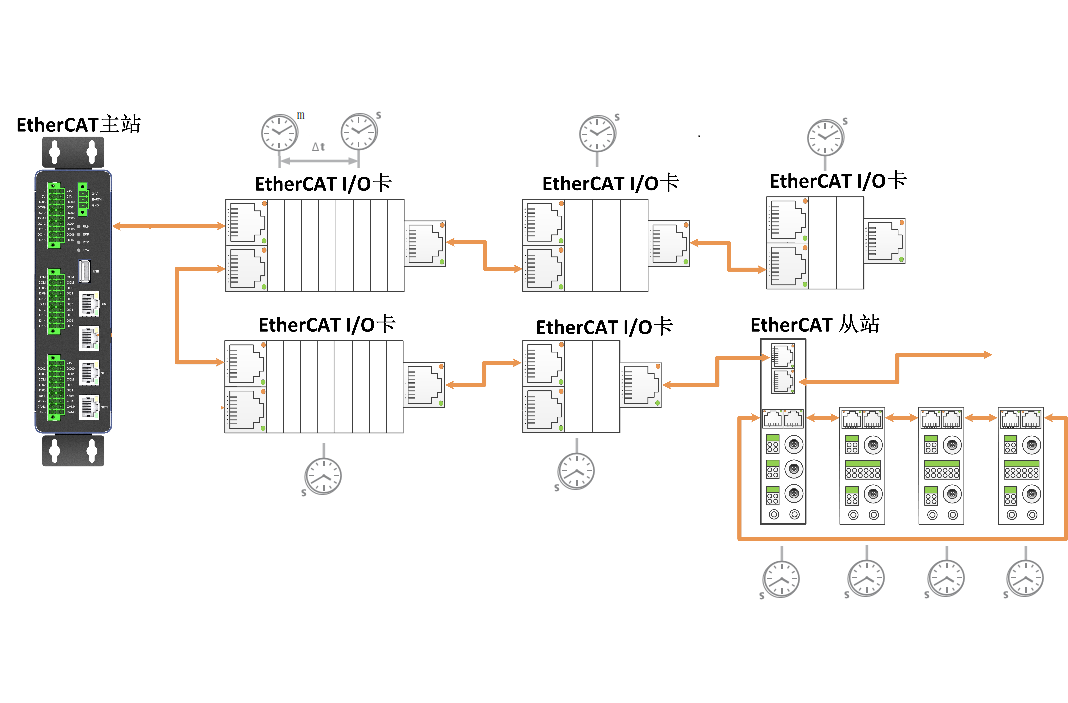 图3 DC分布式时钟图
图3 DC分布式时钟图在多轴运动控制中,时钟同步的精准性能对数据传输产生直接影响,可能会导致丢帧,运动不协调,从而无法控制对各轴设备的同步执行。EtherCAT支持DC分布式时钟,且基于硬件的产生的时钟进行校准和补偿,大大减小了系统的抖动时间。
EtherCAT 实现了数据传输中速率更快、实时性更高、更可靠、传输数据量更大、抗干扰能力更强的等特点,这恰是市场日益要求的性能指标,您心动了吗? EtherCAT帧结构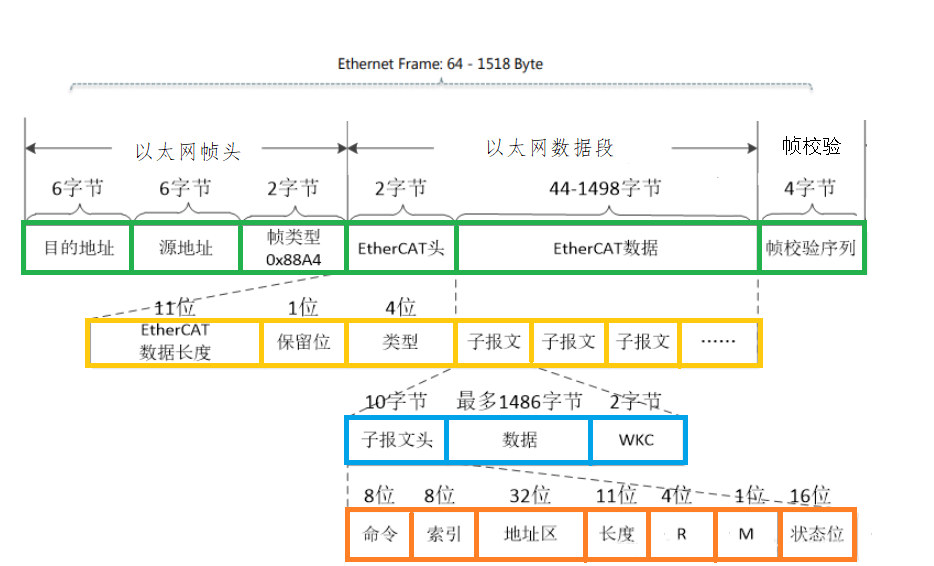
图4 以太网帧格式图
表1 以太网帧含义表|
名称 |
含义 |
|
目的地址 |
接收方MAC地址。 |
|
源地址 |
发送方MAC地址。 |
|
帧类型 |
0x88A4 |
|
EtherCAT头部 |
长度:报文总长度 类型:1 表示与从站通信。 |
|
EtherCAT数据段 |
该段存放着应用层发送的数据。 |
|
帧类型 |
帧校验 |
EtherCAT应用层1. ESM状态机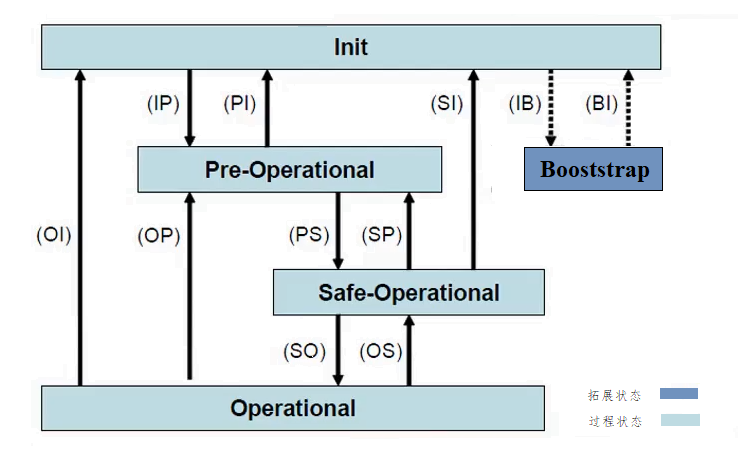
图5 状态机转换关系图
表2 Ethercat状态机含义表
|
状态 |
说明 |
|
Init |
主站和从站之间没有应用层上的通讯,主站可以访问从站DL相关状态寄存器信息。 |
|
Pre-Operration |
如果从站支持邮箱通信,主站和从站可以使用邮箱和相关协议进行应用层次的初始化和参数配置,此状态下不能进行过程数 据通信。 |
|
Safe-Operration |
可以进行过程数据通信,从站可以进行数据的输入,但是不允许数据输出,数据输出处于“安全”状态。 |
|
Operration |
从站可以进行数据的输入输出操作。 |
-
广播寻址
将数据广播到各个从站设备。 -
自增寻址
根据设备连接的顺序进行编号,从0开始,每经过一个从站数值-1,以此递推。 -
设置寻址
相当于给每一个从站分配地址,主站通过从站地址找到对应的从站进行通信。 -
逻辑寻址
主站配备4G的数据逻辑地址空间,FMMU将数据逻辑地址和从站中的物理地址进行映射,主站在帧中只需携带某个逻辑地址,即可寻址到任意从站中的任意数据,是一种更加灵活的寻址方式。
3. 数据传输
3.1 同步管理器SM
同步管理器(Syncmangers)用来协调应用层和主机的数据交互,实现数据同步而不是时间同步,确保数据正确读取和写入,并且同步管理可以以中断的形式通知主机和应用程序更新事件,然后进入中断服务函数中处理即可。SM通道一共用到4个,SM0和SM1用于邮箱数据输和输入,SM2和SM3用于过程数据的输出和输入。3.2 应用层协议EtherCAT应用层协议支持COE、VOE、FOE、EOE等协议,而在电机控制领域我们常用到的是COE协议,COE全称为CanOpen Over EtherCAT,相当于CanOpen协议通过EtherCAT方式来实现,都是基于cia402协议进行编写。主站可以通过邮箱(SDO)或PDO对从站的对象字典进行读写操作,实现数据通讯。邮箱常用对从站的配置和读写,采用应答方式,而PDO为过程数据,实现数据通信的实时和快速传输。4. 设备配置4.1 描述文件
信息描述文件主要有emi、esi、eni文件。emi为主站信息描述文件;esi则是从站描述文件,包含厂商信息、设备信息描述、SM描述、对象字典、配置数据等内容组成;eni是EtherCAT网络信息配置文件,描述从站数量,SM与DC配置信息等,结合esi描述文件,借助配置软件进行配置生成,完成EtherCAT网络运行时对主站和从站设备进行初始化操作。
4.2 配置软件
本文使用的配置软件是ZLG致远电子团队开发的EtherCAT网络配置工具,开发者导入esi从站描述文件后进行相关需求配置,生成相应的eni文件,EtherCAT网络运行时将对所有设备进行初始化。EtherCAT配置软件支持以下功能供帮助开发者快速使用与开发。-
浏览设备信息
显示主站和从站的设备信息,如制造商信息,网络配置信息等内容。 -
浏览拓扑结构
配置软件显示主站和从站的连接拓扑图。 -
FMUU/SM与DC配置
FMMU、SM、PDO相关的信息与配置,DC分布时钟的操作模式选择。 -
浏览输入与输出变量
显示PDO数据的输入与输出数据信息,如通道、名称、类型、位长等信息。 -
邮箱功能
支持选择配置邮箱轮询与读取对象字典的方式,显示相关的COE对象字典列表。 -
内存信息
浏览内存偏移信息与eeprom的参数信息等内容。 -
集成帮助文档
浏览帮助文档,查阅更多的功能介绍与demo示例,帮助使用与开发。
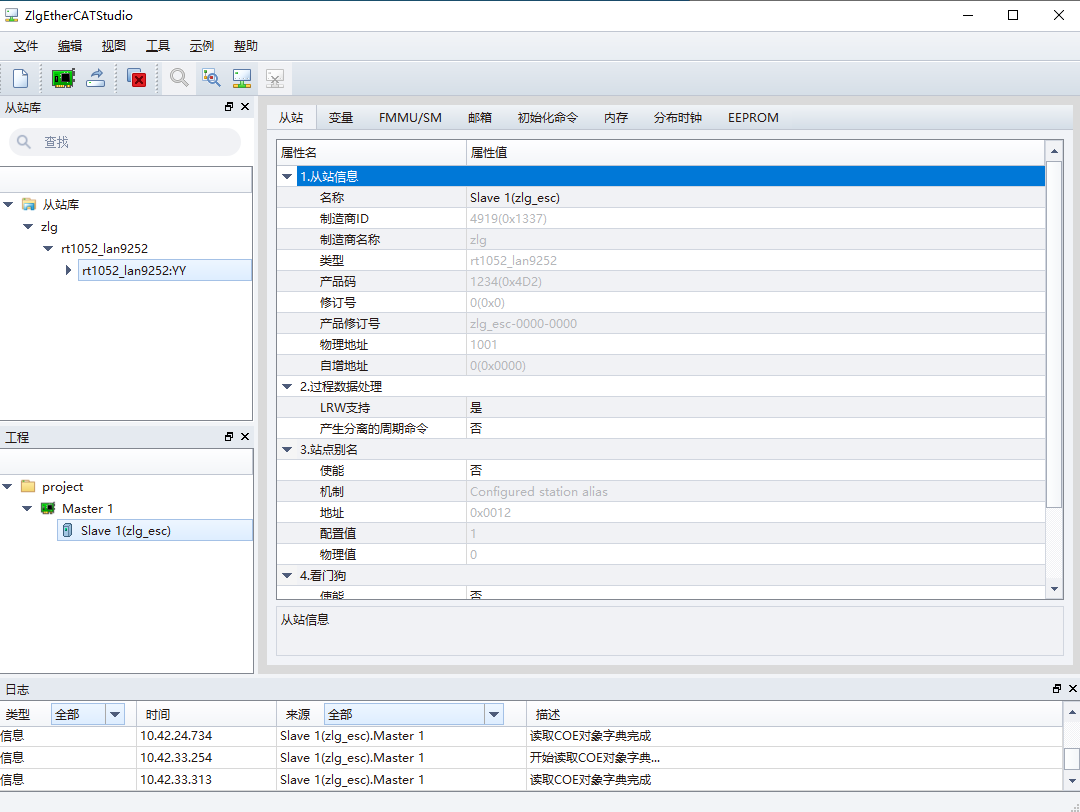
图6 EtherCAT 配置软件主界面图
产品案例
图7 ZMC600E EtherCAT主站控制器
1. 产品介绍
ZMC600E (点击了解详情) 是ZLG致远电子开发的最新一代智能总线型运动控制器,是面向工厂智能化时代的机器控制器。其采用工业领域内先进的嵌入式 ARM 方案,集实时操作系统、智能算法于一身,配套工业图形化编程软件开发环境。
ZMC600E采用TI的双核64位Arm-Corte-A53,四核Cortex-R5F的AM6442应用处理器为核心,主频1GHz,内置1GB DDR4、4GB eMMC以及32KB FRAM,预留有多路以太网、CAN、IO、USB等硬件接口。同时ZMC600E支持点位运动、连续轨迹、直线圆弧插补、连续插补、螺旋线等运动功能,可以自由设定运行速度、停止速度、加、减速时间可以独立设置,S型曲线平滑等参数,支持在线改变速度和在线改变位置,用户可以轻松构智能化控制系统,快速实现和部署现场各种工艺的应用。
2. EtherCAT性能优势-
ZMC600E集成了商业授权的EtherCAT主站解决方案;
-
Cortex-R5F协处理器独立处理EtherCAT数据收发,实时性更强;
-
精准分布式式时钟,振动<1μs;
-
最多支持128个从站节点,节点间距最大100m;
-
支持CoE对象读取写,SoE IDN读写;
-
循环周期最小达125μs,支持线形、树形、星型拓扑结构。
- 相关推荐
- 热点推荐
- 致远电子
-
基于赛灵思FPGA的EtherCAT主站运动控制2018-07-23 7837
-
EtherCAT总线运动控制器硬件是如何进行接线的?2021-07-15 7608
-
EtherCAT运动控制卡之ECI2820如何使用2021-09-01 1949
-
正运动技术运动控制器EtherCAT总线快速入门2021-09-07 2781
-
正运动技术运动控制器EtherCAT总线的基础使用2021-09-27 7218
-
EtherCAT总线运动控制的优势主要体现在哪?2023-02-20 2798
-
经济型EtherCAT运动控制器:EtherCAT总线快速入门2023-05-11 2009
-
EtherCAT总线运动控制的优势主要体现在哪?2023-12-13 3547
-
BLE低功耗蓝牙模块为何如此受欢迎?2017-12-01 1238
-
为什么EtherCAT如此受欢迎?2018-05-08 74729
-
浅谈:耐弯曲电缆为何如此受欢迎?2020-05-11 2429
-
阿尔法机器狗如此受欢迎的魅力是什么2022-03-23 2221
-
EtherCAT总线运动控制器应用进阶一2021-09-22 6008
-
【技术分享】为何EtherCAT在运动控制总线中如此受欢迎?2023-04-03 5229
-
语音芯片排行榜,为何唯创知音WT588F语音芯片如此受欢迎2023-04-28 2038
全部0条评论

快来发表一下你的评论吧 !
