

两种MOS冗余驱动方案
描述
在电源和电机驱动应用中,功率MOS可以在不同的调制方式下,实现相应的能量转换功能。单个MOS驱动的结构如图1所示,通过MCU的 PWM模块调整占空比,控制功率MOS的通断,达到相应的功能。另外,在一些过压,过流和过载工况下,功率MOS很容易损坏,从而造成整个驱动板的失效,甚至存在起火的风险。本文提出两个冗余驱动线路,可以有效避免MOS单点失效的负面影响。
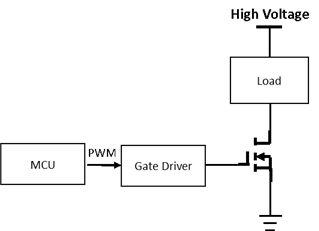
图1:典型的有刷电动工具驱动系统
如图2所示,通过冗余的驱动和功率MOS,可以实现驱动的冗余,有效地隔离MOS失效的故障。在本设计中,驱动线路是完全隔离的,即驱动的原边和副边是隔离,驱动通道1和通道2是隔离。即使MOS失效,比如任意MOS短路,系统的高压并不能传导到低压,从而实现故障隔离。
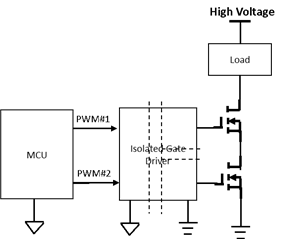
图2:双管冗余驱动方案
双管冗余驱动方案的设计要点如下:
可以采用两个单通道的隔离驱动IC,如果采用隔离半桥驱动芯片,芯片需要支持overlap模式。
输入通道的供电通过电阻和二极管连接到驱动供电轨。当下管导通时,驱动电压轨通过自举二极管为自举电容充电,自举电容上的电压可以为上桥臂驱动模块供电。
自举二极管击穿电压大于母线电压。
隔离IC的隔离工作电压大于母线电压。
PWM输入信号,经过RC滤波网络,避免输入干扰信号。
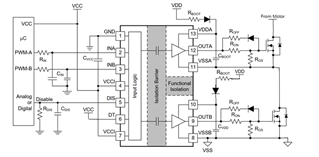
图3:典型的有刷电动工具驱动系统
UCC21225A 是隔离的双通道驱动芯片,原边供电电压3V-18V,副边供电电压6.5V – 25V,驱动延迟时间18ns,CMTI为100V/ns,驱动能力4A/6A,隔离等级为2500Vrms(在UL1577标准下)。UCC21225A根据外围线路,支持两通道的低边驱动,两通道的高边驱动和半桥驱动。在本文中,通过配置DT引脚,UCC21225工作在overlap模式。
表1:UCC21225A的参数表
| Device | Output current | Isolation rating | Input VCC | Output VDD | CMTI | Package |
| UCC21225A | 4A/6A | 2500Vrms | 3V-18V | 6.5V–25V | 100V/ns | VLGA(5mm×5mm) |
同时,UCC21225A具备隔离驱动的特性,输入和输出是隔离的,两个驱动通道之间也是隔离的。TI技术说明文档“Understanding failure modes in isolators”,详细给出了隔离器件的失效模式。由该文档可知,在失效模式2下,输入模块、隔离驱动模块1和隔离驱动模块2中的任一一个模块发生故障(短路或者开路),不会击穿绝缘基,即故障不会传导到其他模块。根据以上分析,MOS的不同形式的单点失效,对系统的影响如表格2所示。
表2:MOS不同失效下系统的影响
| MOS失效模式 | 影响 |
| 任意MOS的DS短路 | 系统功能正常;高压不会传导到驱动,IC功能正常。 |
| 任意MOS的GD短路 | 系统功能正常,高压会损坏UCC21225A的MOS对应的驱动模块,但是UCC21225A的其他部分工作正常;由于自举二极管的存在,功率回路的高压不会传导到驱动供电轨,对系统其他部分无影响。 |
| 任意MOS的GS短路 | 系统功能正常;如果失效发生在上桥臂MOS,高压会损坏UCC21225A的失效MOS对应的驱动模块,UCC21225A的其他部分工作正常,由于自举二极管的作用,功率回路的高压不会传导到驱动供电轨,对系统其他部分无影响;如果失效发生在下桥臂MOS,UCC21225不会损坏。 |
| 任意MOS的GDS短路 | 系统功能正常,高压会损坏UCC21225A的MOS对应的模块,但是UCC21225A的其他部分工作正常;由于自举二极管的存在,功率回路的高压不会传导到驱动供电轨,对系统其他部分无影响。 |
| 任一MOS的GS开路 | 功率回路安全断开,功能性失效;高压不会损坏驱动,IC功能正常。 |
| 任一MOS的DS开路 | 功率回路安全断开,功能性失效;高压不会损坏驱动,IC功能正常。 |
通过以上分析得知,在单个MOS的DS、GD、GS、GDS短路等失效条件下,可以保证系统功能正常,阻断故障点的扩大。但是在单个MOS的GS和DS开路失效条件下,功率回路断开,系统可靠关断。同时,如果双管冗余驱动方案中的隔离半桥驱动,采用支持overlap的非隔离半桥驱动,对于单个MOS的DS短路故障,可以做到良好的隔离,对于MOS的GD、GS和GDS短路失效,会造成驱动IC损坏,系统功能损坏。
双管冗余驱动方案在MOS的GS和DS开路失效下,系统的功能异常,在双管冗余驱动方案上进一步改进,将MOS和驱动线路加倍,双路MOS并联在一起,可以保证在MOS的GS和DS开路失效条件下,系统功能正常。
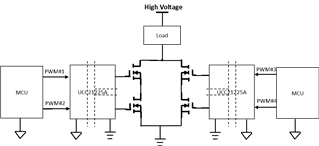
图4:四管冗余驱动线路
最后,虽然本文给出的示例都是低侧MOS驱动,在提供隔离驱动电压轨下,该方案也可以拓展到高侧MOS驱动。双管冗余和四管冗余驱动线路的优缺点如下:
表3:双管冗余和四管冗余驱动方案的优缺点分析
| MOS失效模式 | 优点 | 缺点 |
| 双管冗余驱动方案 |
1.在单个MOS的DS、GD、GS、GDS短路等失效下,隔离故障点,系统功能正常; 2.在单个MOS的DS、GS开路等失效下,隔离故障点,系统可靠关断。 |
1.考虑到上桥臂的驱动供电,对最小同占空比和上电时序由具体要求,控制逻辑复杂。 2.由于MOS的本身特性不对称,驱动IC的两个通道的信号传输延迟差异,MOS开通/关端特性不一致,造成可能性的震荡,PWM频率上限会减低,开关损耗也会增加; 3对于双管冗余方案,由于MOS数量加倍,导通损耗加倍; 4.没有故障诊断,无法定位故障点; 5.成本上升; |
| 四管冗余驱动方案 | 1.在单个MOS的DS、GD、GS、GDS短路,以及单个MOS的DS、GS开路失效下,隔离故障,系统功能正常。 |
本文给出两种MOS的冗余驱动线路,可以有效避免MOS单点故障造成的影响,在MOS的DS、GD、GS、GDS短路等条件下,双管冗余驱动可以保证系统功能正常,阻断故障点的扩大。同时四管冗余驱动,可以保证系统在MOS的任意单点故障下,隔离故障,系统功能正常。
审核编辑:郭婷
-
四种MOS管驱动电路方案介绍2025-10-17 4984
-
分享两种MOS冗余驱动方案2022-11-04 859
-
两种MOS冗余驱动方案2022-10-28 943
-
两种LED驱动模式的功能及使用方法2022-08-26 5355
-
分享一种MasterGaN所采用的集成驱动方案2022-08-23 2515
-
电源和电机驱动的两种MOS的冗余驱动线路2022-01-18 4071
-
电源和电机驱动应用中两种MOS冗余驱动方案分析2021-11-10 8033
-
MOS管静电击穿有两种方式资料下载2021-04-18 1065
-
发光二极管LED的两种驱动方案解析2019-10-28 9524
-
在白光LED驱动中两种拓扑应用电路方案的介绍2018-12-19 4234
-
两种常见热插拔浪涌电流控制方案2015-12-07 1191
-
针对CAN总线传输距离问题的两种解决方案2012-08-16 2573
-
两种常见的MOSFET驱动电路2011-09-23 23360
-
基于FFT的两种伪码快速捕获方案2011-08-26 831
全部0条评论

快来发表一下你的评论吧 !
