

ROS移动机器人中常用的编码器
描述
前两篇文章介绍了电机基础知识和直流有刷电机驱动电路。这篇文章介绍ROS移动机器人中电机测速传感器----编码器。ROS移动机器人中常用到的编码器有两种分别为光电编码器(光学式检测)和霍尔编码器(磁场原理检测)。
光电编码器
光电编码器是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲信号的传感器。 光电编码器由光电码盘和光电检测装置组成,由下图所示:
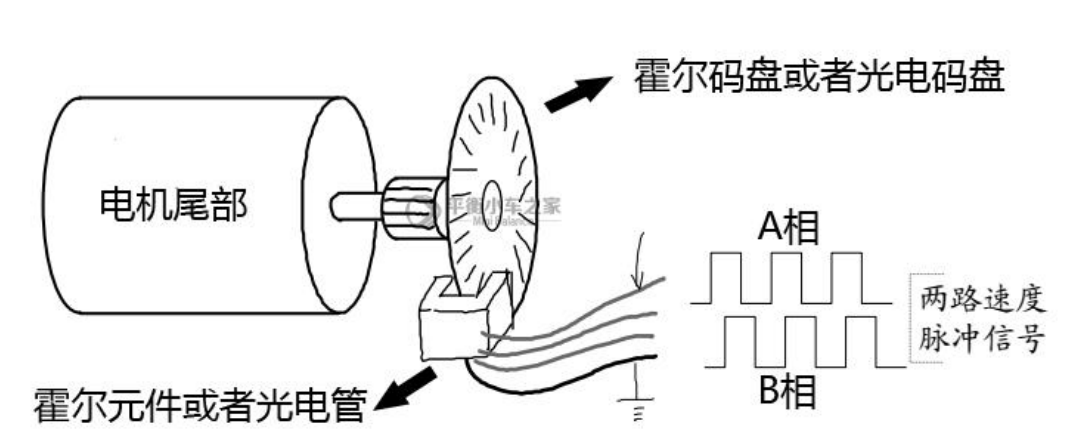
光电码盘与电机转子同轴,电机旋转时带动光电码盘与电机同轴旋转,此时在光电码盘作用下会使得光电接收管接收到的光信号出现断断续续的情况。 比如接收到光信号编码器输出高电平,不能接收到光信号编码器输出低电平,这样编码器就能够输出如上图所示的脉冲信号,通过单片机输入捕获或专用编码器接口就能够检测出电机转速。
在ROS系统中,程序需要知道电机是正传还是反转,为了实现这个功能。 在输出脉冲上采用了两相(A相,B相)相隔90度的脉冲信号。 这样在电机旋转时,通过判断A相与B相的先后关系便能够确定的正反转。
在实际应用中我们只需要使用STM32的正交编码器接口,便可以轻松愉快地得到电机转速与方向。
霍尔编码器
与光电编码器相似,霍尔编码器通过霍尔传感器检测磁场的变化来输出脉冲信号,如下图所示为用于检测磁极变化的传感器,当正对着的磁极发生变化时(比如N级切换到S级),霍尔传感器的输出脚便会出现高低电平的切换(比如低电平切换到高电平)。
霍尔编码器只有霍尔传感器是不能工作的,还需要用到触发霍尔传感器输出信号改变的磁环。
顾名思义,图中的磁环中内嵌了很多磁极,磁极成交错排列(N-S-N-S... ),这样只需要将两个霍尔传感器按照90度电角度安装固定后,让霍尔磁环随着电机转子一同旋转,就能够输出与光电编码器相似的正交脉冲信号。
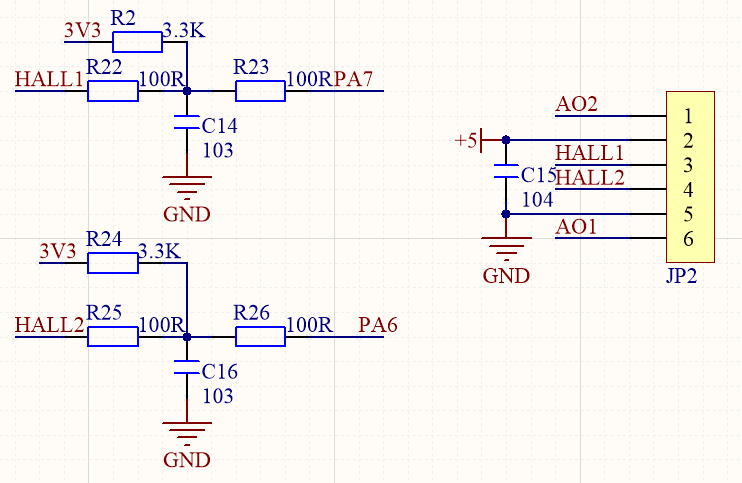
编码器接口电路
编码器接口电路,比较简单。 在霍尔信号输入口出增加滤波电路,滤除传输线上的信号干扰,然后送往单片机进行电机速度计算。
-
ROS移动机器人中常用的两种电机2023-03-17 3051
-
如何利用扫地机轮子制作ROS移动机器人地盘2022-01-14 1353
-
差速移动机器人轨迹跟踪控制方法2021-09-01 1906
-
最实用的STM32和ROS机器人的串口通信方案2021-08-20 1589
-
什么是移动机器人软硬件系统问题2021-08-06 2515
-
PLC技术在移动机器人中的应用研究2021-05-06 1337
-
如何实现移动机器人的设计?2020-11-23 3306
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 3797
-
旋转编码器怎么节约移动机器人功耗?2019-08-13 2341
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4130
-
Labview My RIO 移动机器人2016-08-21 13631
-
移动机器人常用传感器2012-08-20 6923
全部0条评论

快来发表一下你的评论吧 !
