

用于ROS移动机器人高集成电源解决方案(一)
描述
这篇文章一起来看看ROS移动机器人供电系统。 目前某宝常见的ROS学习套件,大都采用12V有刷直流电机,供电电压常采用3节锂电池串联后得到12.6V电压。 经过电压转换后给电机,控制器,树莓派,雷达等传感器供电。 电源的稳定性对一个系统而言是至关重要的。 所以接下来的两篇文章会给大家介绍用于ROS移动机器人高集成电源解决方案。
这篇文章,主要进行系统电源整体分析,以及对于很多人来说都比较头疼的锂电池选型问题。
电压类型
一个硬件系统中往往会存在着多种电压。 在ROS移动机器人中有12.6V电压,5V电压,3.3V电压。 对于这种多电压类型并且存在高电压差的系统,在硬件设计中往往采用逐级降压的方式。 在高压差时为提高能量转换效率多采用开关电源,如常用的非隔离式BUCK拓扑结构,隔离式反激拓扑结构。 在低压差时,为得到低纹波纯净的电源,多采用线性降压方式。
关于BUCK,线性电源的原理在第一个项目已经进行了介绍,可从我的历史文章中查看。
锂电池选型
锂电池的选型要考虑多种因素,如电池体积,容量,放电倍率,循环充放电次数,价格。 选型结果应该是权衡了以上多种因素后得到的。
锂电池放电倍率是一个重要的参数:它用来表示电池充放电电流大小的比率,即倍率。 如1200mAh的电池,1C表示1200mA(1200mAh的1倍率),10C表示12000mA(1200mAH的10倍率)。
锂电池放电倍率越大表明锂电池能够以越大的电流进行放电,选择合适的放电倍率对于ROS移动机器人是很重要的。 锂电池放电倍率不够时当电机启动瞬间或者电机转向时,在PID算法的控制下,想要达到系统瞬态响应的需求,需要锂电池提供很大的电流(电流值跟电机负载,PID参数都有关系),如果锂电池不能提供这么大的电流,锂电池电压会被迅速拉低,控制部分电压出现抖动,单片机复位重启都有可能。
系统最大电流推算
系统中耗电大户分别为:两个直流电机,树莓派,雷达,控制器。
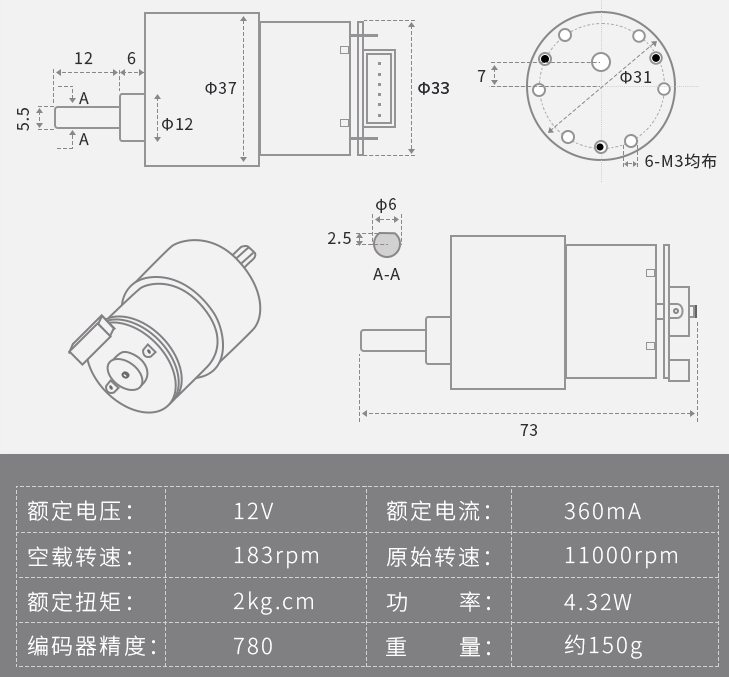
树莓派的供电电源需满足2A的电流供给能力,雷达和控制器使用5V/2A便可以满足需求。由于电机属于感性负载,在电机启动瞬间,电机电流可达到额定电流的4-7倍。在设计中,假设电机启动瞬间,电流为额定电流的7倍。
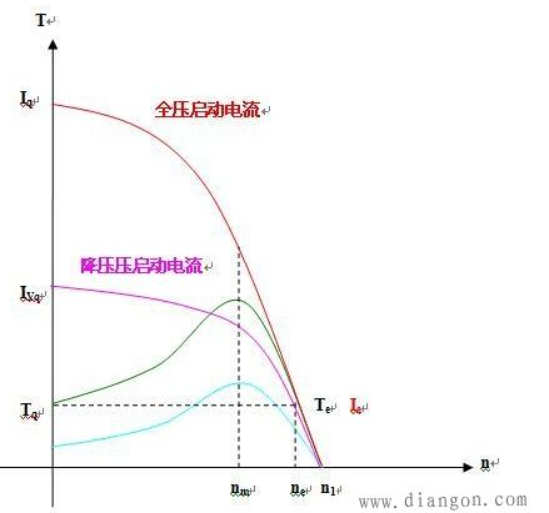
例如,一个额定电流为360ma的有刷直流电机,启动瞬间电流可以达到2520ma,留出20%的设计余量,此时在启动瞬间,一个电机最大需要消耗3024ma的电流,两个电机则需要电池提供6A以上的电流。结合树莓派,雷达,控制器的耗电量,可知电池最大需要提供10A以上的电流。
根据电池放电倍率可知,当使用一个容量为2600mAh的三串锂电池时,锂电池的放电倍率应该大于3.8C才能够满足系统的供电需求。
锂电池选型推荐
| 体积 | 选择18650动力电芯 |
|---|---|
| 容量 | 2600mAh |
| 放电倍率 | >4C |
| 价格 | 12元/节 |
-
基于Matlab和VR技术的移动机器人建模及仿真2023-09-20 820
-
用于ROS移动机器人高集成电源解决方案(二)2023-03-17 2755
-
如何利用扫地机轮子制作ROS移动机器人地盘2022-01-14 1361
-
DRC3000:商用移动机器人整体解决方案2022-01-07 1632
-
移动机器人的三种主要运动系统2021-09-01 2247
-
最实用的STM32和ROS机器人的串口通信方案2021-08-20 1603
-
什么是移动机器人软硬件系统问题2021-08-06 2528
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 3004
-
如何实现移动机器人的设计?2020-11-23 3327
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4147
-
Labview My RIO 移动机器人2016-08-21 13644
-
资料:移动机器人能否自动充电?2016-01-20 5187
-
移动机器人常用传感器2012-08-20 6945
全部0条评论

快来发表一下你的评论吧 !
