

用于ROS移动机器人高集成电源解决方案(二)
描述
上篇文章,详细分析了ROS移动机器人最大耗电电流,并根据锂电池放电倍率,给出锂电池的推荐选型。 具体分析可以在我的公众号历史文章中查看。 这篇文章,来介绍供电系统中的锂电池均衡电路。
锂电池为什么要均衡
由于锂电池生产工艺的原因,在生产过程中每一块锂电池都会存在多多少少的差异。 比如锂电池内阻的差异,容量的差异。 这就造成了锂电池在串联使用时,组内每块电池在使用过程中出现容量不均衡的现象。
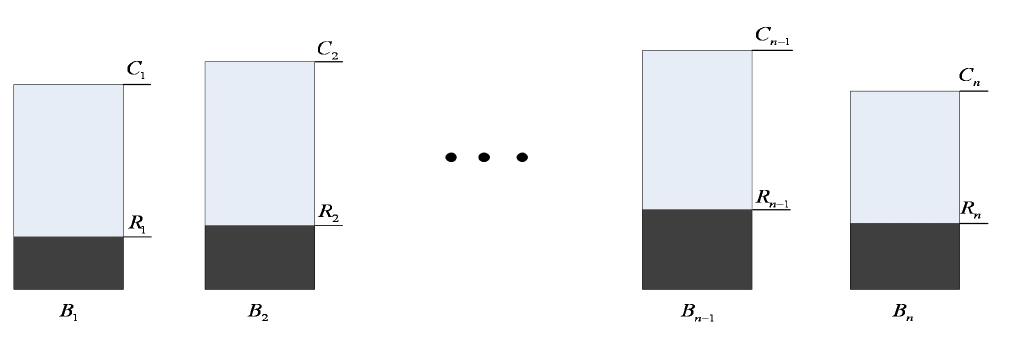
如上图所示,高度为电池容量,在电池使用过程中由于内阻的差异,会慢慢出现容量不均衡的情况。
锂电池组存在的短板效应,表示电池组中容量最小的电池决定了整个电池组的充电质量,也决定了电池组的寿命。
所以锂电池组在使用过程中,需要给锂电池加入均衡电路,在锂电池每次充电程中对每块锂电池进行均衡。
锂电池均衡原理
目前锂电池最常用的两种均衡技术分别是被动均衡和主动均衡。 主动均衡虽说具有被动均衡不可超越的优点,但其拓扑复杂,实现成本高,常用与电动汽车锂电池均衡。 所以在这里只采用被动均衡技术。
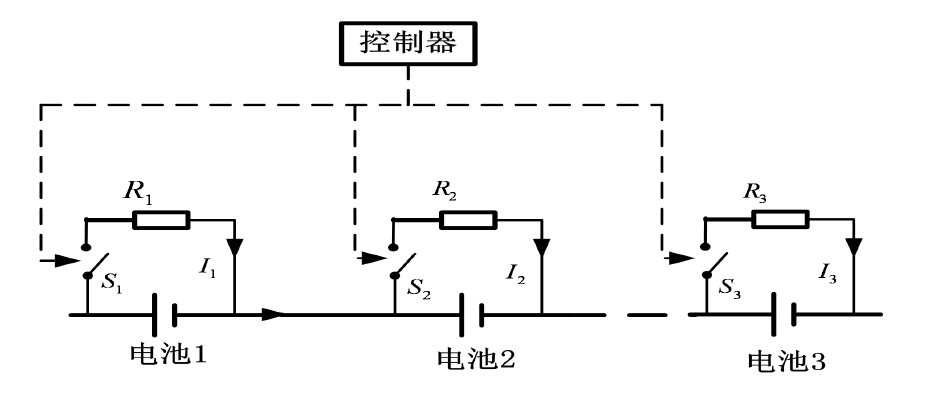
如上图所示,被动均衡表示在电池组使用过程中出现不均衡现象时使用电阻消耗掉能量较多电池的能量,向最低容量电池看齐。 比如此时,三节电池容量分别为90%,92%,93%,这时均衡系统会通过控制电路将92%和93%的锂电池使用电阻消耗掉能量,向容量为90%的那块电池看齐。 当电池组充电时先充满的电池同样会使用电阻进行消耗能量,等待其余电池依次充满电后才指示充电完成。
锂电池均衡充电电路
由于单节锂电池最大充电电压为4.2V,当给三节锂电充电时,其最大充电电压应为12.6V。 充电器需要提供稳定充电电压的同时还需要具有三段式充电功能(锂电池三段式充电介绍可看公众号第一个项目中相关文章)。 充电器的选择,直接购买12.6V电源适配器即可。
下图所示,为本系统中采用的锂电池均衡方案。 使用三片HY2213,在锂电池充电时,用来检测每块锂电池电压,如果当某一块锂电池电压达到4.2V时,相应的HY2213就会控制MOS管打开,通过电阻消耗锂电池能量,直到三块锂电池电压都冲到4.2V时,此次充电结束。
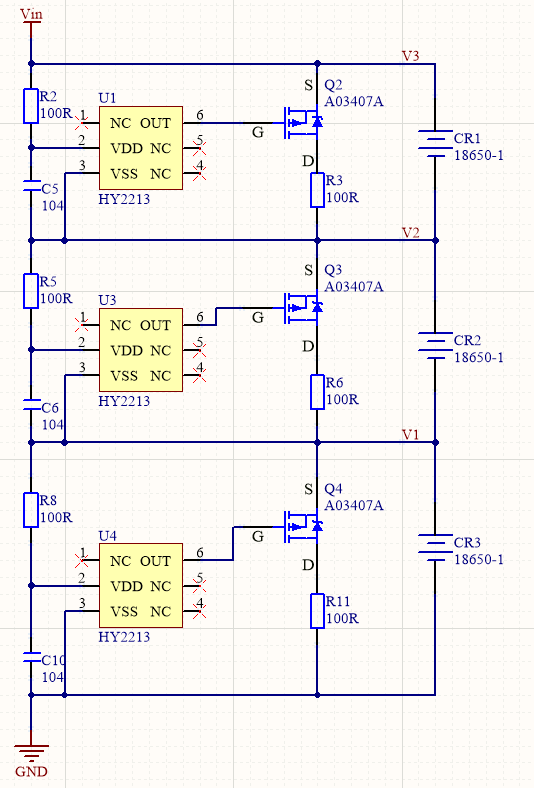
电路设计中用于均衡的电阻的阻值为100欧,根据欧姆定律在均衡过程中电阻消耗功率为0.1764W,所以在电阻选型上可选择1206封装贴片电阻。
-
轮式移动机器人电机驱动系统的研究与开发2025-06-11 395
-
基于Matlab和VR技术的移动机器人建模及仿真2023-09-20 808
-
用于ROS移动机器人高集成电源解决方案(一)2023-03-17 2467
-
如何利用扫地机轮子制作ROS移动机器人地盘2022-01-14 1354
-
DRC3000:商用移动机器人整体解决方案2022-01-07 1585
-
移动机器人的三种主要运动系统2021-09-01 2241
-
最实用的STM32和ROS机器人的串口通信方案2021-08-20 1592
-
什么是移动机器人软硬件系统问题2021-08-06 2519
-
如何实现移动机器人的设计?2020-11-23 3313
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 3807
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4136
-
Labview My RIO 移动机器人2016-08-21 13635
-
资料:移动机器人能否自动充电?2016-01-20 5181
全部0条评论

快来发表一下你的评论吧 !
