

KUKA机器人外部自动控制配置步骤
机器人
描述
启动外部自动运行
前提条件
运行方式 T1 或 T2
用于外部自动运行的输入 / 输出端已配置。
程序 CELL.SRC 已配置。
操作步骤 1. 在导航器中选择 CELL.SRC 程序。(在文件夹 “R1” 中。) 2. 将程序倍率设定为 100%。(以上为建议的设定值。也可根据需要设定成其它数值。) 3. 执行 SAK 运动:按住确认开关。然后按住启动按键,直至提示信息窗显示 “ 已达 SAK”。 4. 选择 “ 外部自动 ” 运行方式 5. 在上一级控制系统 (PLC) 处启动程序。 为了停止在自动运行中启动的程序,请按下停止键。
配置自动外部:
如果机器人程序要由上级控制器(例如PLC)集中控制,则可以使用”自动外部”界面来执行。
上级控制器通过自动外部接口将用于机器人过程的信号(例如运动使能,故障确认,程序启动等)传输到机器人控制器。机械手控制器将有关操作状态和故障状态的信息传输到上级控制器。
为了启用自动外部接口的使用,必须执行以下配置:
| 1 | CELL.SRC程序的配置。 |
| 2 | 自动外部接口的输入/输出配置。 |
可以使用 CWRITE 语句和 RUN 从程序 SPS.SUB 调用 CELL.SRC。该调用仅在冷启动的情况下生效。
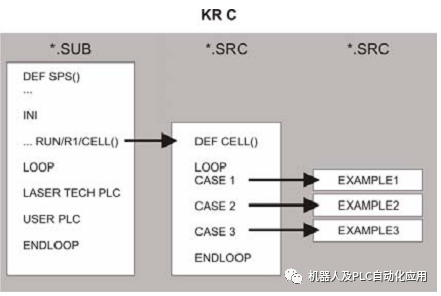
SPS.SUB 在机器人解释器中选择 CELL.SRC
IF ($OUT[PF0] AND VW_CALL_CELL AND ( NOT $PRO_MOVE) AND ($MODE_OP==#EX)) THEN
CWRITE($CMD,STAT,MODE,"STOP 1") 程序停止
CWRITE($CMD,STAT,MODE,"CANCEL 1") 退出程序
P_OLD=P_SELECT
CWRITE($CMD,STAT,MODE,"RUN /R1/CELL ()")调用CELL 程序
ENDIF
配置CELL.SRC
在自动外部模式下,使用程序CELL.SRC调用Folgen。
1.在主菜单中,选择启动>服务> CELL配置。
2.在“现有程序”窗口中,选择要插入到CELL.SRC中的程序,然后按添加软键。
3.如果需要,请重复步骤2将其他程序插入CELL.SRC。
4.按确定。响应确认请求,询问是否应保存更改。
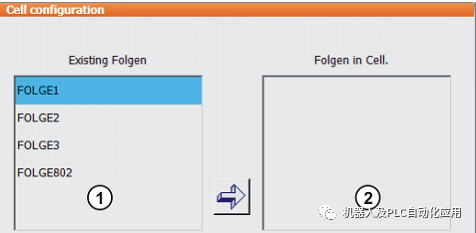
1.可用于配置CELL.SRC的所有Folgen将显示在“现有Folgen”窗口中。
2.位于CELL.SRC中的所有Folgen都显示在“单元格”窗口中的Folgen中。
添加: 将选定的程序插入CELL.SRC。仅在“现有程序”窗口中可用。
删除: 从CELL.SRC中删除选定的程序。仅在“程序”窗口中可用。
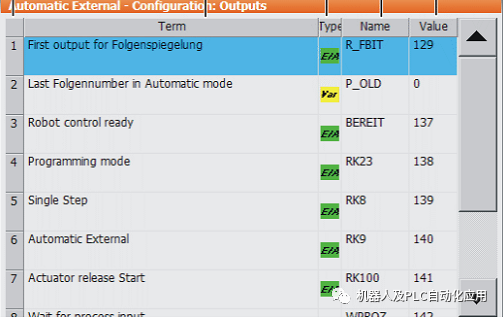
配置自动外部输入/输出:
1.在主菜单中,选择配置>输入/输出>自动外部。
2.在“值”列中,选择要编辑的单元格,然后按“编辑”。
3.输入所需的值,然后按OK保存。
4.对所有要编辑的值重复步骤2和3。
5.关闭窗口。更改已保存。

配置外部自动输入

配置自动外部输出
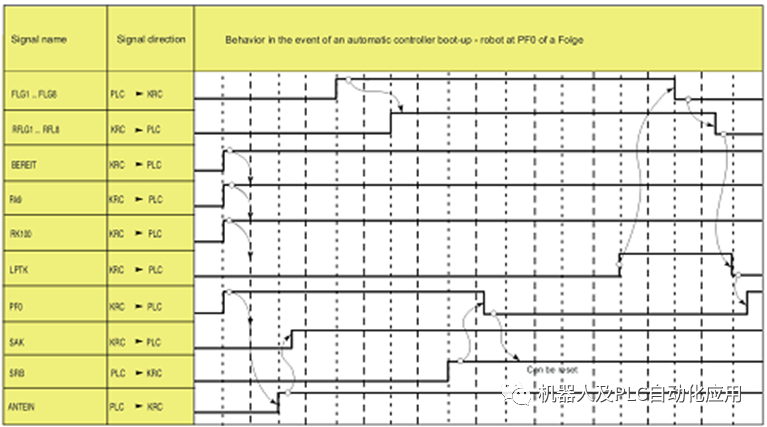
自动外部输入:
ANTEIN
如果在此输入上设置了高电平脉冲,则上级控制器将打开机器人驱动器。输入必须永久存在才能启用操作。如果设置为低,上级控制器将关闭机器人驱动器。
SRB
如果在此输入上有一个持续时间至少为20 ms的高电平脉冲,则上级控制器将启动所选程序。
P_TYPE
该变量定义了读取上级控制器发送的程序号的格式。
| 0 |
读取为二进制数。 程序号由上位控制器作为二进制编码的整数传输。不检查值的奇偶校验。 |
0 0 1 0 0 1 1 1 => PGNO = 39 |
| 1 |
读为“ n之1” *。 程序号由上位控制器或外围设备作为“ n的1”编码值发送。 |
0 0 0 0 0 0 0 1 => PGNO = 1 0 0 0 0 0 0 1 0 => PGNO = 2 0 0 0 0 1 0 0 0 => PGNO = 4 |
P_FBIT
输入代表程序号的第一位。值的范围:1…4096。
示例:P_FBIT = 5 =>外部程序号以输入5开头。
P_LEN
此变量确定上级控制器发送的程序号中的位数。值范围:1…16。
示例:P_LEN = 4 =>外部程序号为4位长。
自动外部输出:
R_FBIT
输出表示程序号的第一位。
输出区域的大小取决于定义程序编号(P_LEN)的位数。
如果上级控制器发送的程序号未签名或与格式P_TYPE不对应,则R_FBIT设置为FALSE。
P_OLD
此变量指示“自动外部”模式下的最后一个程序号。值范围:1…999
BEREIT
通过设置此输出,机器人控制器将与准备就绪的上级控制器进行通信。
万一机器人控制器出现错误,该输出将复位,用户可以通过KCP消除该错误。相应的错误消息显示在KCP上,例如 如果是Interbus主站错误或不允许的操作模式。
RK23
如果设置了工作模式T1或T2并且没有程序在运行,则此输出为TRUE。
RK8
如果设置了操作模式T1或T2,则此输出为TRUE。
RK9
编辑:黄飞
-
KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤2023-07-05 9868
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1826
-
KUKA机器人C4外部自动控制最终版-v1介绍2023-01-08 3379
-
浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件2022-11-10 2014
-
KUKA机器人C4配置自动外部控制的步骤2022-09-15 2296
-
KUKA机器人伺服驱动模块维修2021-09-17 1885
-
库卡机器人MGV电源模块维修2021-09-08 1881
-
KUKA机器人C4外部自动模式的配置解析2020-10-09 5312
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10911
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12402
-
KUKA机器人问题解答2019-07-15 2625
-
求KUKA机器人控制柜三维模型2016-04-18 6462
-
KUKA重型机器人2015-02-03 8320
全部0条评论

快来发表一下你的评论吧 !
