

PWM调制的控制方式
描述
从调制到控制
在专题的上一篇中介绍了各种PWM调制的思路由来,以及衍生出一系列Buck的控制模式。
这一篇,我们将从这个思路延续,并对真实世界的产品一探究竟:各个厂家天花乱坠的控制名称这么多,归根结底都来源于什么。
乱花渐欲迷人眼
为了说清楚各种控制策略的本质,先来说明电压模式控制,和电流模式控制的定义,和可能的所有情形。
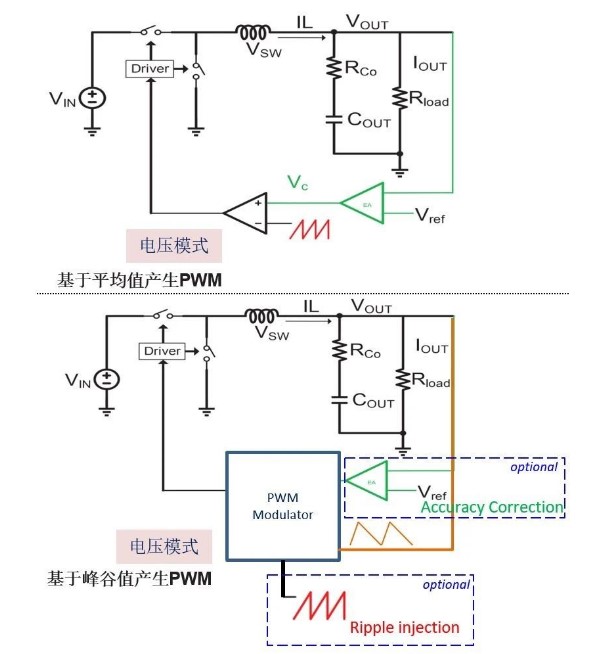
电压模式(PWM由电压信号调制产生)
通常情况下是单环的,区别仅在于是通过平均值比较(Average-Based)而产生PWM,还是通过纹波的峰谷值比较(Ripple-Based)产生PWM 。
因为峰谷值比较的缘故,输出电压的平均值和Vref参考值会有误差,为了修正误差提高精度,有时会增加含EA的电压外环形成双环控制,本文称为“精度修正”(Accuracy Correction)。在文献中,这种把Vo信息反馈给两个不同地方的控制手段,叫作“V² Control”。
当输出电压的ESR不能主导纹波时,通过额外的手段产生一个类似电感电流,或同相位于电感电流的波形,代替ESR信息参与控制,以确保控制逻辑的正常运行,避免次谐波震荡。在文献中,这种手段叫作“纹波注入”(Ripple Inejction)。
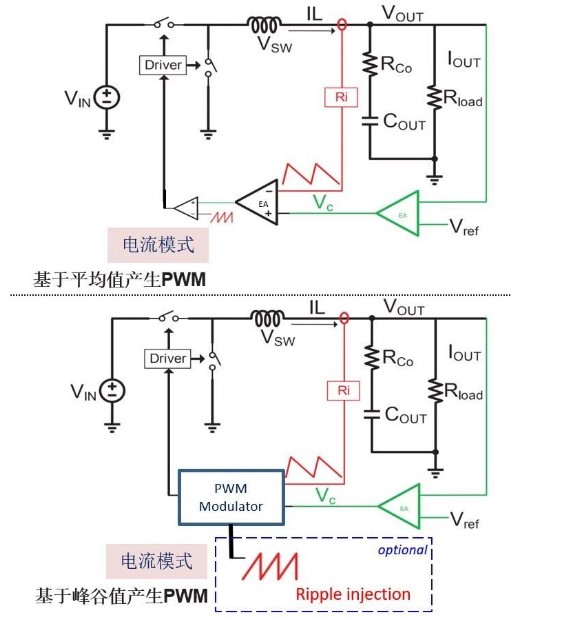
电流模式(PWM由电流信号调制产生)
双环控制,区别仅在于是通过平均值比较(Average-Based)而产生PWM,还是通过纹波的峰谷值比较(Ripple-Based)产生PWM 。
电感电流的采样,可以依据PWM基于峰值比较还是谷值比较,只采样上管电流还是下管电流,甚至,只采样峰值点还是谷值点。更特别的,可以不直接采样回路里的电流,而类似纹波注入的思路,生成一个同相位的“虚拟电感电流”(Emulated Current)信息,代替真实的电流采样,参与控制。
类似电压控制模式,注入同相位的纹波可以提高控制逻辑的鲁棒性。为了避免次谐波震荡,有时同样需要“纹波注入”(Ripple Inejction),比如峰值电流控制中的斜坡补偿;另一方面,这样做可提高PWM的抗扰性和稳定度(Noise Immunity, Jittering),也可据此调节环路小信号模型的特性。
浅草才能没马蹄
提到变频的滞环和COT/FOT控制,以及伪定频的自适应计时器做法。实际上,滞环控制也可以通过自适应的上下比较阈值实现伪定频。下表中,把自适应的伪定频调制方法加上"Adaptive"前缀。
接着,我们把提到的定频PWM调制和PWM+PFM混合调制分为两大类,然后依据本文介绍的电压模式和电流模式再细分,对绝大部分的Buck控制模式进行分类。
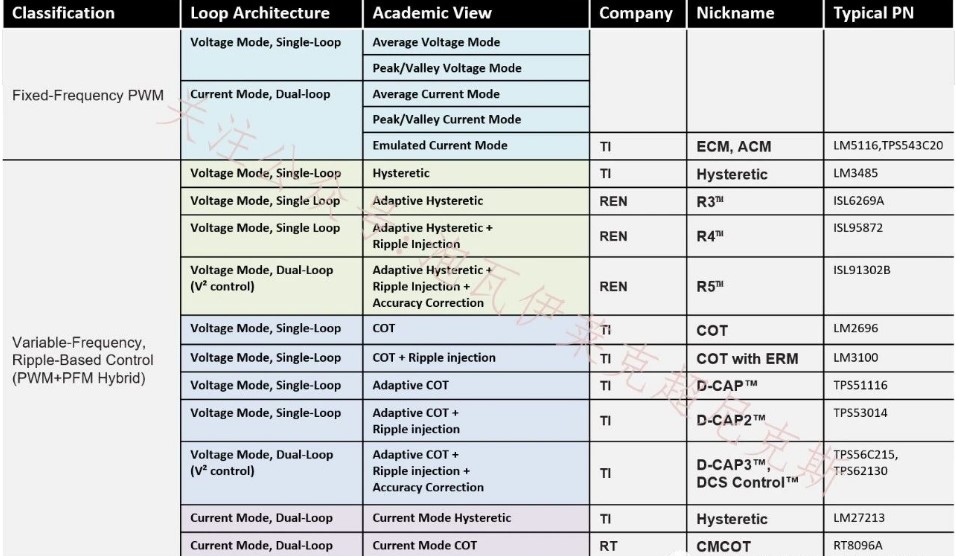
需要特别注意,标注出的公司和相应的控制策略,只是笔者个人认为的,该种控制思路的一个典型代表,并不意味着有且仅有这一厂家/这一系列采取了这种控制策略。
另外,自适应阈值/计时器的做法,虚拟电感电流的产生,纹波注入的方式,和修正精度用电压外环的设计,每一家甚至每一个控制系列的细节实现,一定不尽相同,具体可参考如下各厂家的公开资料,和通过表中"Academic"关键词检索IEEE文献学习。
最后,基于Buck的控制策略,绝大部分可以拓展到其他任何拓扑的控制研究中去,Paper就是这么来的。
-
BLDC控制中都有哪些PWM调制方式?2025-02-07 4913
-
常用的pwm跟踪控制方式是哪三种2024-08-14 3734
-
PWM信号产生的原理及方式2024-08-12 8441
-
PWM和PFM控制方式介绍2024-02-04 4179
-
单极性和双极性pwm调制的区别2023-12-07 10453
-
不同PWM调制方式对无刷直流电机调速的影响2022-10-21 1154
-
脉冲宽度调制PWM的基本原理控制方式是什么2022-03-02 1978
-
PWM变频器的调制方式2021-09-03 1937
-
数字电源的调制方式介绍2020-12-19 5953
-
pwm调制原理同步调制_几种pwm调制方式介绍2018-01-25 73148
-
无刷直流电机PWM_ON_PWM调制方式转矩特性研究2017-01-07 1099
-
无刷直流电机的PWM调制方式介绍2016-07-12 1222
-
PWM_ON_PWM调制方式来减小无刷直流电机的转矩脉动2012-03-04 6876
全部0条评论

快来发表一下你的评论吧 !
