

四种最常用的环路补偿网络对比
描述
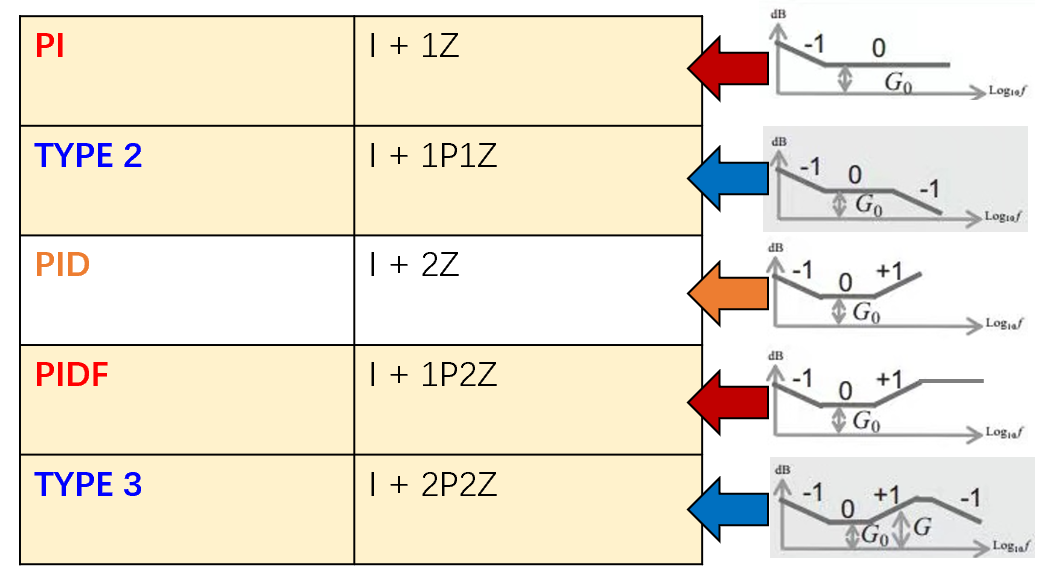
一文几乎穷举了环路各种补偿网络的传递函数及其OPA/OTA电路实现,其中PI, TYPE 2, PID, TYPE 3是四种最常用的补偿网络。实际应用时,PID往往还会在微分项中再加一个低通滤波的极点(“不完全微分”),防止高频增益上翘,保证一定的增益裕量GM。
此类能抑制高频噪声的实用PID结构,称为PIDF(PID+Filter)。
PI, 类型 2, PID, PIDF, 类型 3
PIDF的实现方式不止一种,基于运放OPA的电路实现如下。
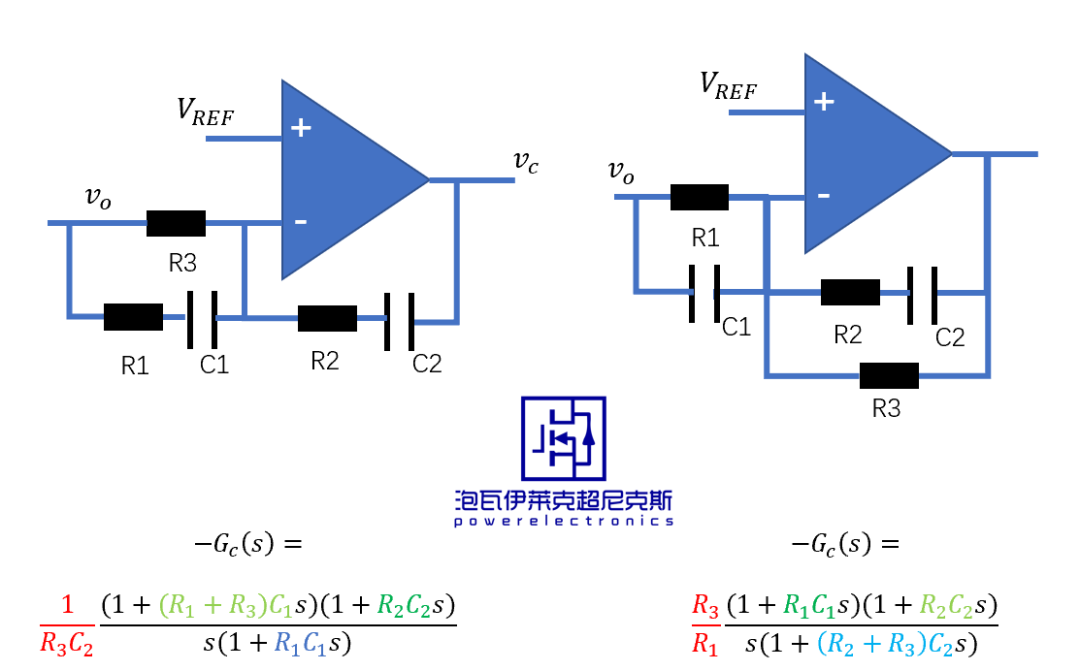
PIDF的OPA运放电路实现
四种最常用的补偿
PI,类型 2,PIDF,类型 3
把PI, TYPE 2, PIDF, TYPE 3这四种补偿网络放在一起对比,更有研究的意义。
TYPE 2对比PI
都可提供最大0°的相位,但TYPE 2多了一个高频极点,高频增益/相位均衰减;
TYPE 3对比PIDF
都可提供最大+90°的相位,但TYPE 3多了一个高频极点,高频增益/相位均衰减;
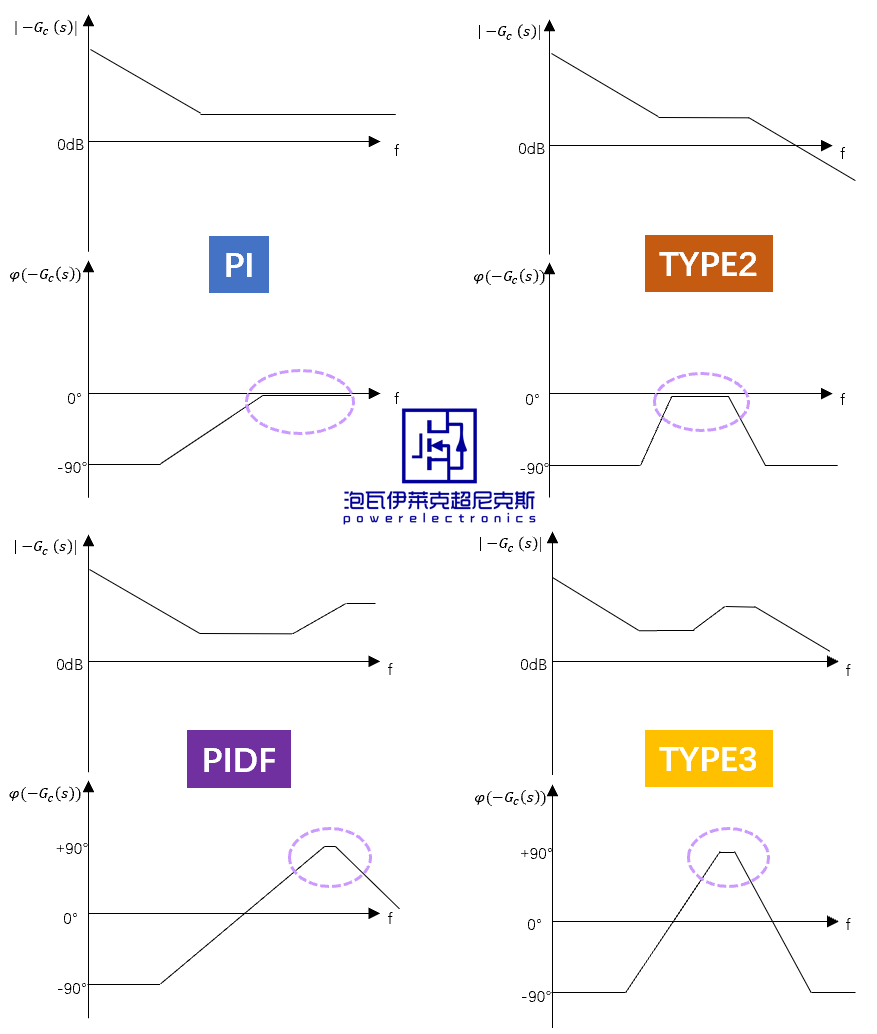
PI, TYPE 2, PIDF, TYPE 3的频率特性
本文将继续以电压模式Buck的环路为例,从补偿后的结果出发,深入对比上文提到的这四种补偿。
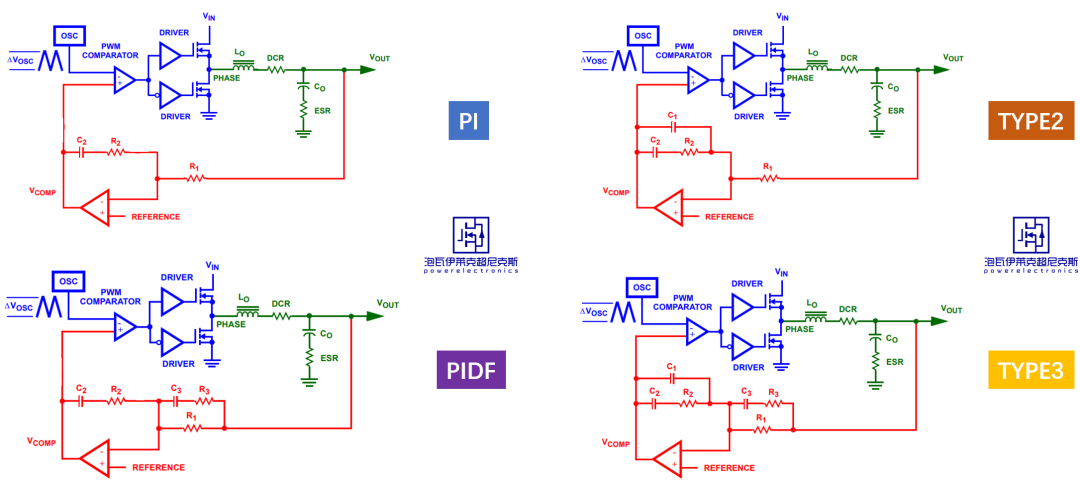
PI, TYPE 2, PIDF, TYPE 3补偿的Buck电路
“公平”的对比
不同补偿下,环路均设计到最优
当补偿器的类型选定,级联后的环路传函的系统类型也被固定,调参使带宽(穿越频率fc)越高,动态响应的速度越快; 相位裕量(PM)越高,时域的稳定性越好。
以电压模式控制的Buck为研究对象,利用PSIM自带的SmartCtrl ^®^ 模块,观察不同fc(定PM)和不同PM(定 fc )的环路特性。 下图绿色是Buck开环控制-输出的被控对象传函,玫红色是补偿完的环路loop gain传函,蓝色是时域波形:负载电流小信号阶跃下的输出电压调节波形。
不同fc(定PM)和不同PM(定fc)的环路特性
容易得到结论1:
最优的环路设计应使得带宽(穿越频率fc)最大的同时,相位也达到最大,以取得最大的相位裕量PM 。
继续在SmartCtrl ^®^ 模块中分别观察TYPE 2和TYPE 3补偿的环路,下图横轴是目标 fc ,纵轴是目标PM,任一坐标点代表一组(fc,PM)的设计目标,和对应补偿网络的参数。
淡黄色是高于fsw的区域,红色是不稳定或无解的区域,白色是环路稳定的可行区域,其中的(fc,PM)组合都是可行解。 当最大fc都设定在约1/6**fsw*时,两者的最优设计点分别在如下红星位置,TYPE 3的最大PM明显高于TYPE 2,这符合预期。
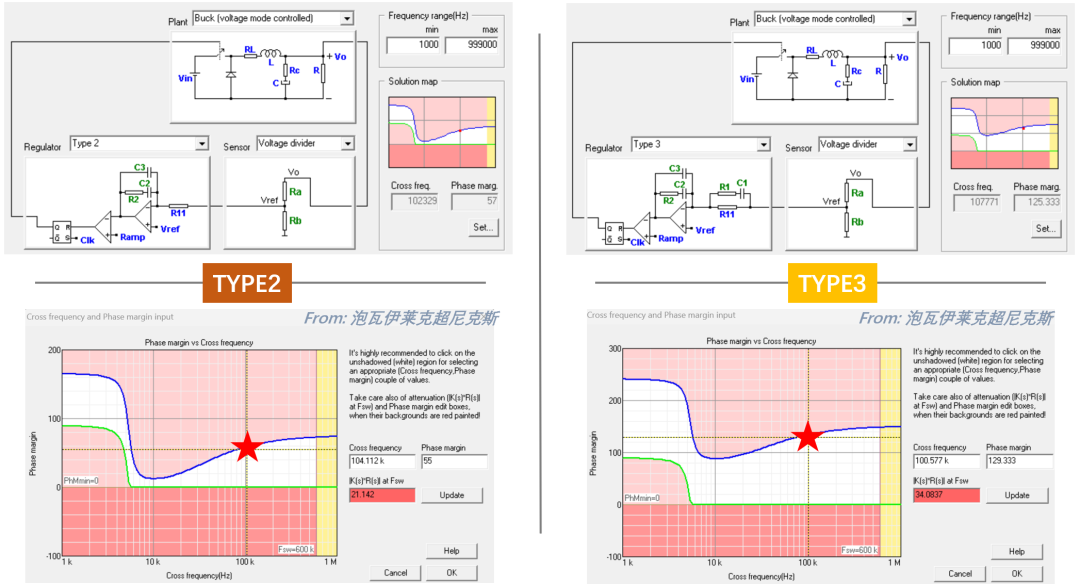
TYPE 2和TYPE 3补偿的环路最优设计点
容易得到结论2:
不同类型的补偿网络,在设计成相同环路带宽(穿越频率 fc )的情况下,能达到的最大相位和相位裕量PM是不同的。
提过,fc的极限在理论上可逼近1/2* fsw ,但考虑到充足的相位裕量,及工程上仍用小信号平均建模指导设计的事实,我们仍将最大 fc设置在(1/6~1/5)*fsw附近。 只要fsw确定,最大fc也随即确定,调节补偿网络参数使得fc*处的相位最大(即PM最大),则环路被设计到最优。 总之,针对相同的被控对象,比较不同类型的补偿网络时,要把每种补偿下的环路都设计到最优,才可得到“公平”的比较结果。
被控对象的特点
基于一个电压模式控制的Buck实例
研究过电压模式控制的Buck,输出电容的ESR相对较大时,能在环路中高频段提供更多的相位提升。
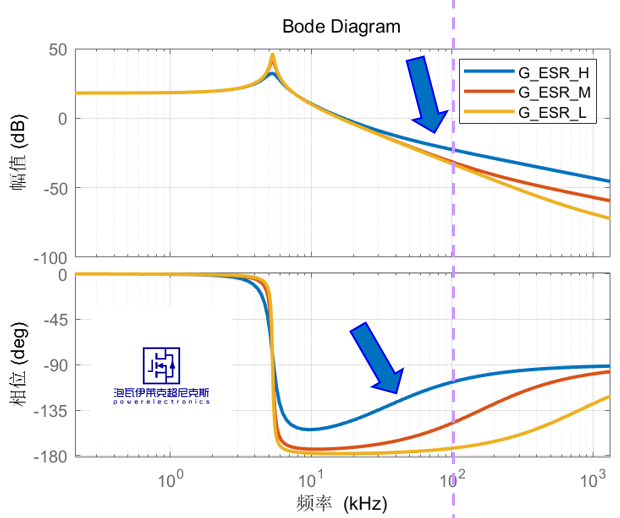
不同ESR的Buck开环被控对象,本例选ESR最大的蓝色
为了让没有额外相位提升能力的PI和TYPE 2补偿网络,也能提供足够的PM,使比较更有实际价值,本文采用上图中电容ESR最高的蓝色作为实例,参数如下表。 最大fc则设定在约1/6*fsw=100kHz,上图紫色虚线处。
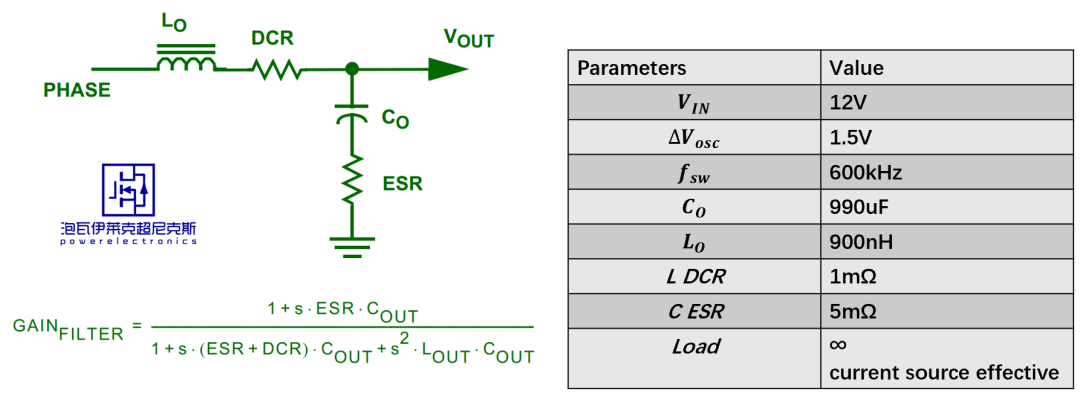
Buck开环被控对象的参数
PI, TYPE 2, PIDF, TYPE 3大比拼
基于一个电压模式控制的Buck实例
将PI, TYPE 2, PIDF, TYPE 3四种补偿网络能提供最大相位的频段,都设计在上图被控对象的100kHz附近(紫色虚线处),同时在该点的增益相同(和被控对象级联后为0dB),即认为它们都处于环路的最优设计点附近,这是公平比较的基础。
在fc=100kHz处,PI和TYPE 2都提供了约0°的相位,而PIDF和TYPE 3都提供了约65°的相位。
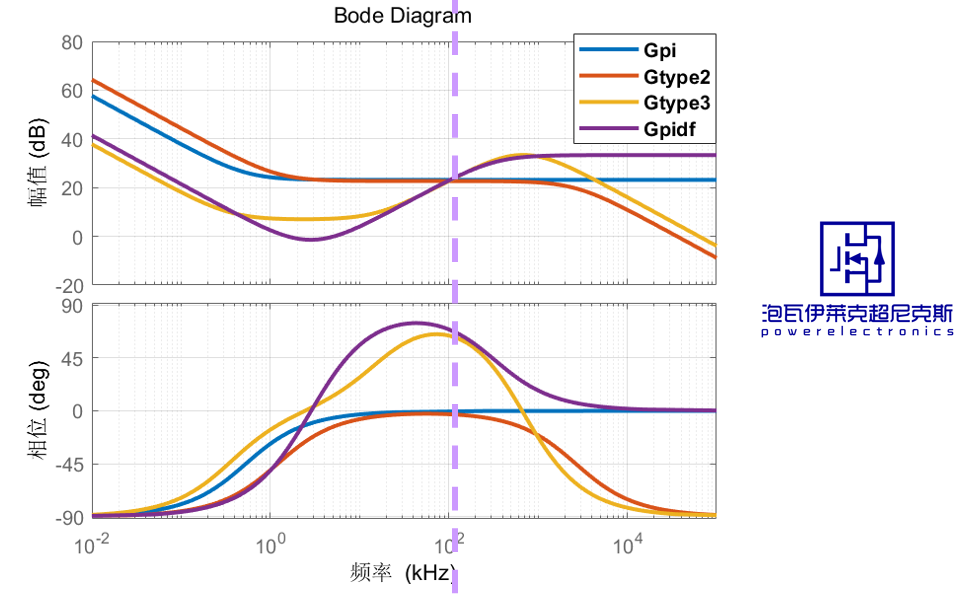
PI, TYPE 2, PIDF, TYPE 3在最优设计下的补偿网络频率特性
如下是对应级联后的环路loop gain结果,在 fc= 100kHz处,PI和TYPE 2的PM≈70°,PIDF和TYPE 3的PM≈140°。
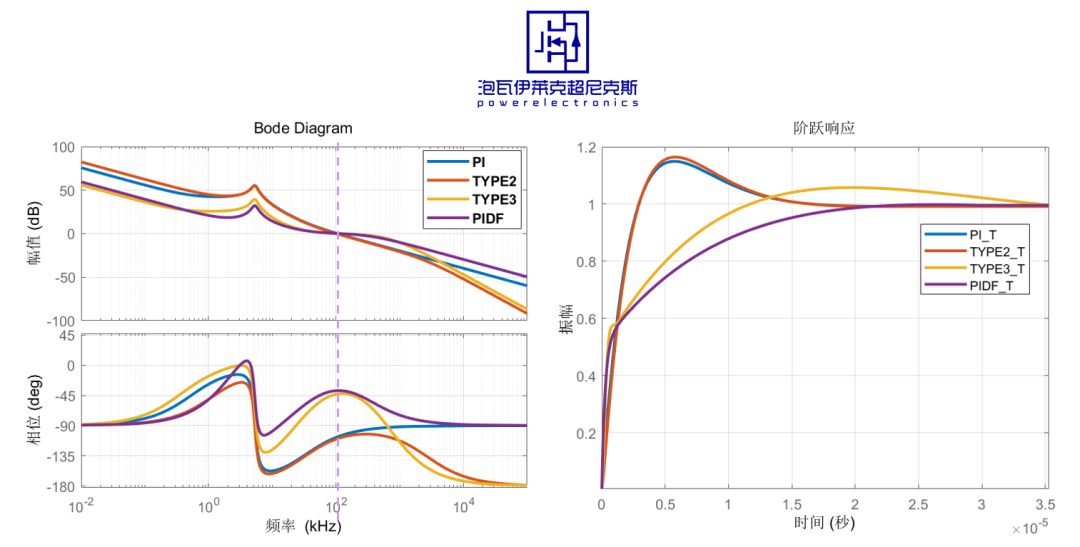
PI, TYPE 2, PIDF, TYPE 3在最优设计下的环路频率特性,和闭环阶跃响应
由环路频率特性,配合闭环阶跃响应的结果可知:
从时域稳定性(振荡/过冲)的角度,PIDIF/TYPE 3优于PI/TYPE 2,因为它们的相位裕量PM更大
从稳态误差的角度,PI/TYPE 2优于PIDF/TYPE 3,因为它们的低频增益更高
从抑制高频干扰的角度,TYPE 2/TYPE 3优于PI/PIDF,因为它们的高频增益更低,增益裕量GM更大
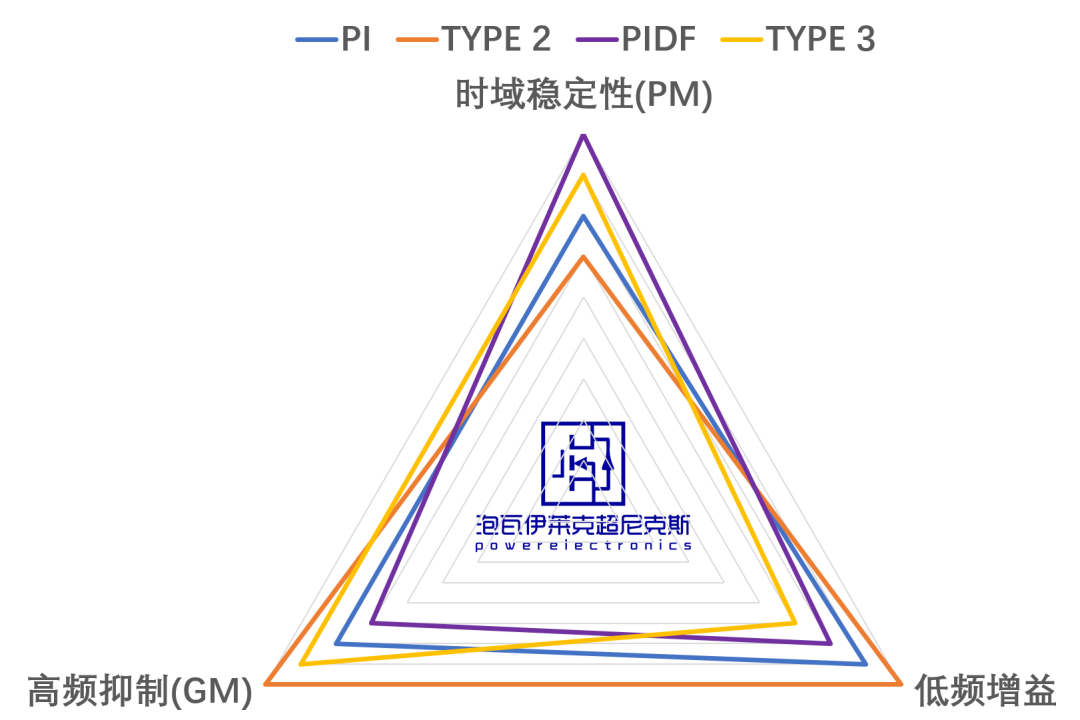
PI, TYPE 2, PIDF, TYPE 3的比较结果
-
RDMA简介3之四种子协议对比2025-06-04 1353
-
热电偶补偿的四种方式有哪些2024-07-23 7639
-
四种常用的谐波治理方法2022-03-01 16382
-
单片机最常用的四种烧写方式是什么?2021-09-27 1938
-
四种门电路符号的详细对比2021-02-09 14487
-
开关电源环路补偿讲解之开关电源反馈环路如何调试设计分析集合分享2020-08-05 24709
-
滤波器有几种?四种滤波器之间对比详解2017-11-13 140808
-
四种常用的FPGA设计思想与技巧2017-11-05 2020
-
FPGA 设计的四种常用思想与技巧2012-08-11 6872
-
常用FPGA/CPLD四种设计技巧2010-05-12 1120
-
FPGA设计的四种常用思想与技巧2009-10-29 533
-
电源设备中常用的四种变换电路(续)2009-07-27 2854
全部0条评论

快来发表一下你的评论吧 !
