

简述CAN总线由来
电子说
描述
01
CAN总线由来
CAN总线最早是由Bosch和Intel在80年代末开发的,虽然最早是用在汽车级的通信系统中的,但是随着技术的发展,CAN总线应用范围已经不在局限于汽车中,像机器人、工业、自动控制系统中,都有广泛的应用。
02
CAN总线为什么这么好用
以CAN总线应用最广的汽车给大家举例,汽车电子控制系统之间的数据通信基本上都是通过CAN总线实现。
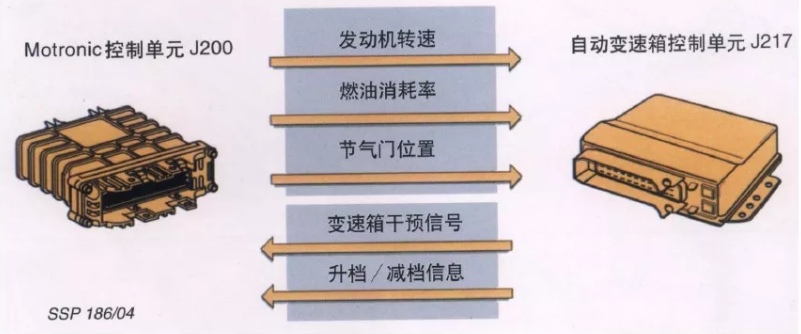
在下图中,Motronic控制单元和变速箱控制单元之间的数据通信包含5根数据线。这还仅仅是两个控制器之间的传输线。如果我们再加上转向控制、雨刷控制、车窗控制等等,就需要大量的信号数据线,这个时候会导致整车的电子控制系统线路复杂,维修起来也非常困难。
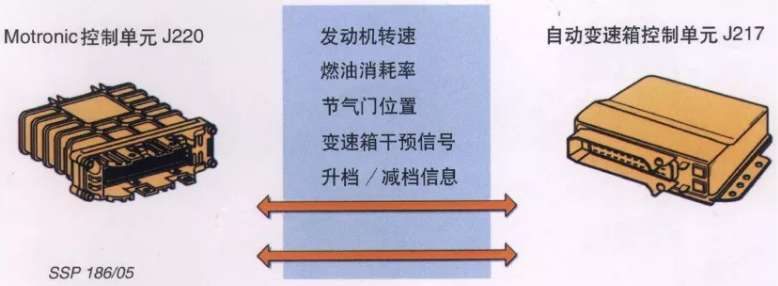
而如果使用CAN总线,各个控制单元之间的信息通过两根数据线就可以进行交换了:
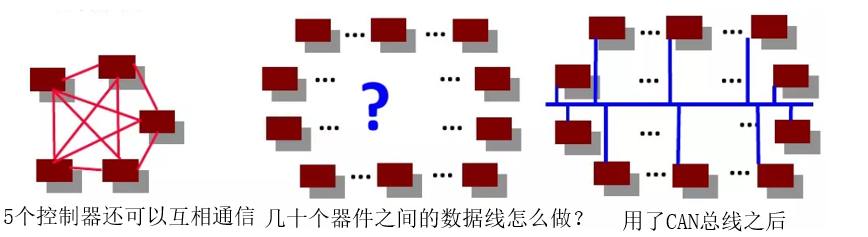
使用CAN总线之后的通信网络对比:
03
CAN总线技术原理
CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以使用光缆连接,而且支持多主控制器。
当CAN总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。对每个节点来说,无论数据是否是发给自己的,都对其进行接收。
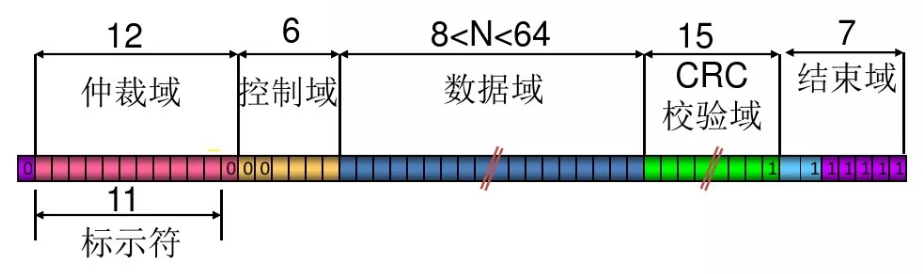
CAN总线的软件报文
在上面这组报文中:
仲裁域, 每组报文开头内容,前11位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方案。在同一系统中 标识符是唯一的 ,不可能有两个站发送具有相同标识符的报文。当几个站同时竞争总线读取时,这种配置十分重要。
在仲裁域的最后一位是远程传输请求位(RTR),代表信息帧是数据帧还是不包含任何数据的远地请求帧
控制域, 前两位是保留位,作为扩展位,DLC表示一帧中数据字节的数目。
数据域, 包含0~8字节的数据。
校验域, 检验位错用的循环冗余校验域,共15位。
结束域, 由七位隐性电平组成。
CAN总线是可靠性很高的总线,共有五种错误:
CRC错误: 发送与接收的CRC值不同发生该错误;
格式错误: 帧格式不合法发生该错误;
应答错误: 发送节点在ACK阶段没有收到应答信息发生该错误;
位发送错误: 发送节点在发送信息时发现总线电平与发送电平不符发生该错误;
位填充错误: 通信线缆上违反通信规则时发生该错误。
当发生这五种错误之一时,发送节点或接受节点将发送错误帧。
04
CAN总线物理层
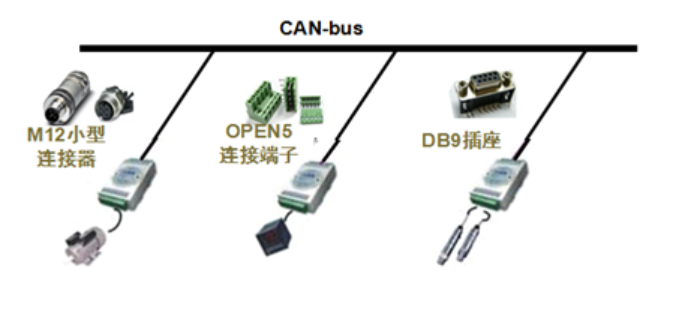
在节点终端的接口器件有三种形式,如下图:
CAN总线的终端电阻的接法如下:
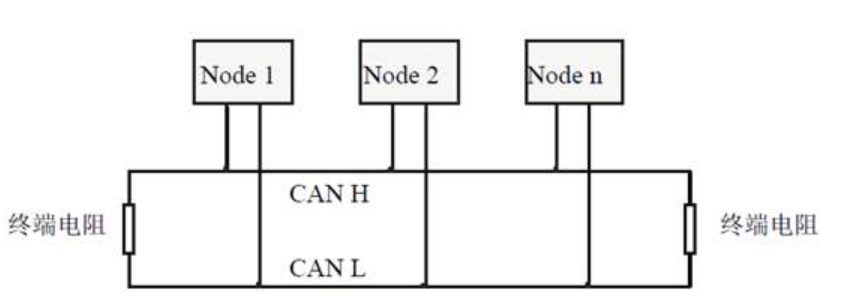
增加终端电阻的目的是为了增强CAN通讯的可靠性,消除CAN总线终端信号反射干扰。CAN总线网络最远的两个端点通常要加入终端匹配电阻,如上图。一般如果CAN总线使用的是在双绞线上运行,这时我们会增加120Ω的电阻,这是因为匹配电阻是由传输电缆的特性阻抗决定的。
05
常用CAN控制器与收发器
在开发板上CAN总线需要控制器和收发器,下图是常用的CAN总线接口电路:
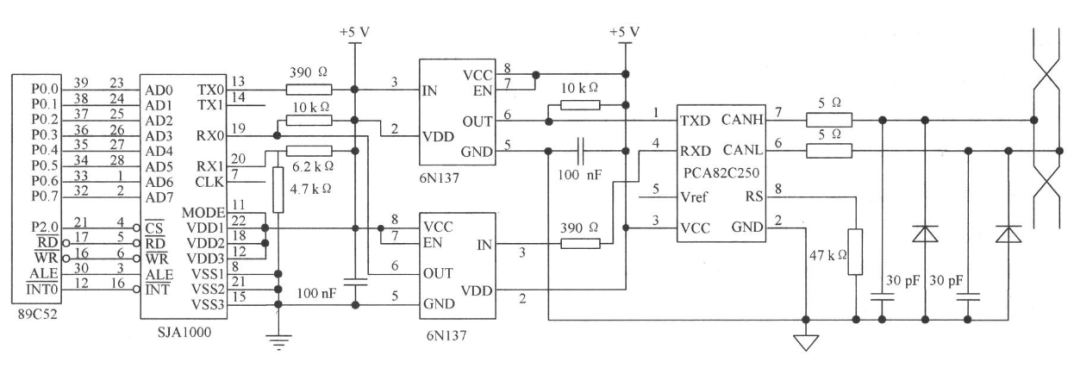
SJA1000是用的较多的独立CAN控制器,价格又很便宜,几十块钱。SJA1000可以和51单片机、STM32等组合快速搭建CAN总线网络。SJA1000通过并行总线与MCU连接,需要通过地址、数据、读写控制等多个线进行连接。
PCA82C250收发器是CAN控制器的物理接口,可以给总线提供差动发送和接受信号。和SJA1000一样,都是采用5V供电。
没玩过CAN总线的小伙伴,可以自制或者淘宝购买2个带有单片机+控制器和收发器的开发板,两者之间一对一点对点通信,一块作为主控发送控制数据,另一块接受数据并执行操作,比如点个灯。如此简单,就试试吧!
-
CAN总线通讯原理-原来这么简单!#总线通讯 #总线传输 #汽车CAN总线 #电路知识安泰小课堂 2025-04-24
-
CAN总线基础知识汇总#CAN #CANoe #汽车总线北汇信息POLELINK 2024-11-04
-
什么是CAN时钟?#CAN #汽车CAN总线 #CANoe北汇信息POLELINK 2024-10-29
-
什么是CAN总线通信?CAN总线工作原理2024-02-19 11446
-
CAN总线访问与仲裁机制#汽车CAN总线北汇信息POLELINK 2023-10-20
-
can总线为什么要用双绞线?can总线不用双绞线可以吗?2023-09-14 8194
-
CAN总线的位定时与同步机制#汽车CAN总线北汇信息POLELINK 2023-07-17
-
CAN 总线错误检测机制#can总线北汇信息POLELINK 2023-05-26
-
高速CAN总线和低速CAN总线的特性2023-04-07 4446
-
CAN总线为什么这么火,CAN总线是什么2022-01-15 6865
-
CAN总线简述2021-08-19 1914
-
CAN总线协议是什么?CAN总线协议有哪些?CAN总线协议知识分析2018-10-03 76627
-
CAN总线概述及应用_CAN总线的应用案例(汽车CAN总线应用)2018-05-07 36487
-
基于CAN 总线的分布式潜水电机监控系统2009-05-25 731
全部0条评论

快来发表一下你的评论吧 !
