

一文读懂振动传感器测量振动的方式
描述
振动是自然界最普遍的现象之一,大至宇宙小至原子粒子,无不存在振动现象。在工程技术领域中振动现象比比皆是,但在很多情况下振动是有害的,例如:振动降低加工精度和光洁度,加剧结构件的疲劳和磨损,在车辆和航空领域中机体及结构件的振动不但会影响驾驶员的操作和舒适度,严重情况下还会引起机体、结构件的断裂甚至解体。
振动传感器是用于检测冲击力或者加速度的传感器 ,通常使用的是加上应力就会产生电荷的压电器件,也有采用别的材料和方法可以进行检测的传感器。
振动传感器可用于机械中的振动和位移、转子与机壳的热膨胀量的长期监测;生产线的在线自动检测和自动控制;科学研究中的多种微小距离和微小运动的测量等。振动传感器广泛应用于能源、化工、医学、汽车、冶金,机器制造,军工,科研教学等诸多领域。
振动传感器测量振动的方式很多,但总结起来,原理大多都采用以下三种:
机械式测量方法:将工程振动的变化量转换成机械信号,再经机械系统放大后,进行测量、记录,常用的仪器有杠杆式测振仪和盖格尔测振仪,这种方法测量频率较,精度差,但操作起来很方便。
光学式测量方法:将工程振动的变化量转换为光学信号,经光学系统放大后显示和记录。象激光测振仪就是采用这种方法。
电测方法:将工程振动的变化量转换成电信号,经线路放大后显示和记录。它是先将机械振动量转化成电量,然后对其进行测量,根据对应关系,知道振动量的大小,这是目前应用得最广泛的震动测量方法。
从上面三种测量方法可以看出,它们都是经过振动传感器、信号放大电路和显示记录三个环节来完成的。
振动传感器的分类
振动传感器在机械接收原理方面,只有相对式、惯性式两种,但在机电变换方面,由于变换方法和性质不同,其种类繁多,应用范围也极其广泛。在现代振动测量中所用的传感器,已不是传统概念上独立的机械测量装置,它仅是整个测量系统中的一个环节,且与后续的电子线路紧密相关。
由于传感器内部机电变换原理的不同,输出的电量也各不相同。有的是将机械量的变化变换为电动势、电荷的变化,有的是将机械振动量的变化变换为电阻 、电感等参量的变化。
一般说来,这些电量 并不能直接被后续的显示、记录、分析仪器所接受。因此针对不同机电变换原理的传感器,必须附以专配的测量线路。测量线路的作用是将传感器的输出电量 最后变为后续显示、分析仪器所能接受的一般电压信号。
一般情况下,振动传感器按其功能不同可以有以下几种几种分法:
按机械接收原理分为相对式、惯性式;
按机电变换原理分为电动式、压电式、电涡流式、电感式、电容式、电阻式、光电式;
按所测机械量分为位移传感器、速度传感器、加速度传感器。
相对式和惯性式振动传感器
相对式振动传感器主要用于测量振动体相对其振动参照点的运动(例如机床转轴相对于机床底座的振动等);
惯性式振动传感器主要用于测量振动体相对于大地或惯性空间的运动(例如机床底座的振动、地面的振动、天空中飞机的振动等)。绝对式测振传感器因为内部包含惯性质量块,故又称为惯性式测振传感器。
惯性式式振动传感器必须与被测振动体接触安装,相对式传感器可以是接触式,亦可以是非接触式的。
电动式振动传感器
电动式振动传感器又分为相对式电动传感器和惯性式电动电动传感器
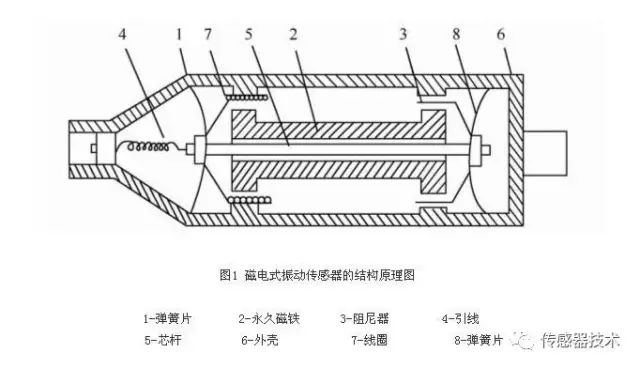
相对式电动传感器基于电磁感应原理,即当运动的导体在固定的磁场里切割磁力线时,导体两端就感生出电动势,因此利用这一原理而生产的传感器称为电动式传感器。
惯性式电动传感器由固定部分、可动部分以及支承弹簧部分所组成。为了使传感器工作在位移传感器状态,其可动部分的质量应该足够的大,而支承弹簧的刚度应该足够的小,也就是让传感器具有足够低的固有频率。
根据电磁感应定律,感应电动势为:u=BLX&r式中B为磁通密度,为线圈在磁场内的有效长度, r x&为线圈在磁场中的相对速度。
从传感器的结构上来说,惯性式电动传感器是一个位移传感器。然而由于其输出的电信号是由电磁感应产生,根据电磁感应电律,当线圈在磁场中作相对运动时,所感生的电动势与线圈切割磁力线的速度成正比。
压电式振动传感器
压电式振动传感器还可以分为压电式加速度传感器、压电式力传感器和阻抗头
压电式加速度传感器
压电式加速度传感器的机械接收部分是惯性式加速度机械接收原理,机电部分利用的是压电晶体的正压电效应。其原理是某些晶体(如人工极化陶瓷、压电石英晶体等,不同的压电材料具有不同的压电系数,一般都可以在压电材料性能表中查到。)
在一定方向的外力作用下或承受变形时,它的晶体面或极化面上将有电荷产生,这种从机械能(力,变形)到电能(电荷,电场)的变换称为正压电效应。而从电能(电场,电压)到机械能(变形,力)的变换称为逆压电效应。
因此利用晶体的压电效应,可以制成测力传感器,在振动测量中,由于压电晶体所受的力是惯性质量块的牵连惯性力,所产生的电荷数与加速度大小成正比,所以压电式传感器是加速度传感器。
压电式力传感器
在振动试验中,除了测量振动,还经常需要测量对试件施加的动态激振力。压电式力传感器具有频率范围宽、动态范围大、体积小和重量轻等优点,因而获得广泛应用。压电式力传感器的工作原理是利用压电晶体的压电效应,即压电式力传感器的输出电荷信号与外力成正比。
阻抗头
阻抗头是一种综合性传感器。它集压电式力传感器和压电式加速度传感器于一体,其作用是在力传递点测量激振力的同时测量该点的运动响应。
因此阻抗头由两部分组成,一部分是力传感器,另一部分是加速度传感器,它的优点是,保证测量点的响应就是激振点的响应。
使用时将小头(测力端)连向结构,大头(测量加速度)与激振器的施力杆相连。从“力信号输出端”测量激振力的信号,从“加速度信号输出端”测量加速度的响应信号。
注意,阻抗头一般只能承受轻载荷,因而只可以用于轻型的结构、机械部件以及材料试样的测量。无论是力传感器还是阻抗头,其信号转换元件都是压电晶体,因而其测量线路均应是电压放大器或电荷放大器。
电涡流式振动传感器
电涡流振动传感器是一种相对式非接触式传感器,它是通过传感器端部与被测物体之间的距离变化来测量物体的振动位移或幅值的。

电涡流传感器具有频率范围宽(0~10 kHZ),线性工作范围大、灵敏度高以及非接触式测量等优点,主要应用于静位移的测量、振动位移的测量、旋转机械中监测转轴的振动测量。
电感式振动传感器
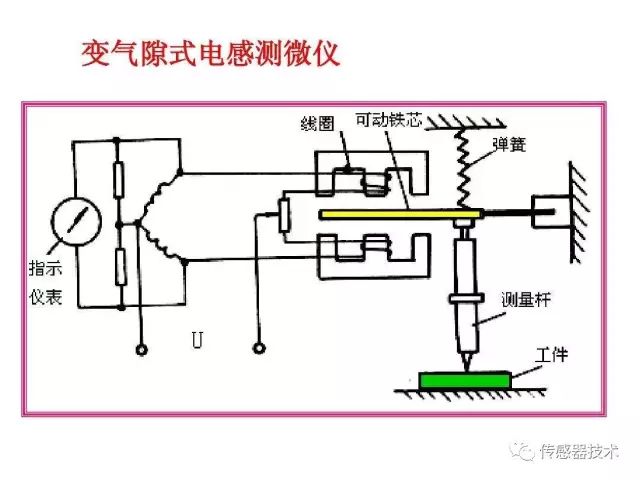
电感式振动传感器是依据电磁感应原理设计的一种振动传感器。电感式振动传感器设置有磁铁和导磁体,对物体进行振动测量时,能将机械振动参数转化为电参量信号。因此,电感传感器有二种形式,一是可变间隙,二是可变导磁面积。电感式振动传感器能应用于振动速度、加速度等参数的测量。
电容式振动传感器
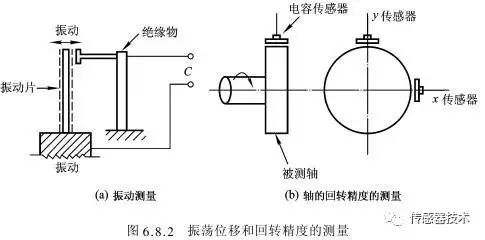
电容式振动传感器是通过间隙或公共面积的改变来获得可变电容,再对电容量进行测定而后得到机械振动参数的。电容式振动传感器可以分为可变间隙式和可变公共面积式两种,前者可以用来测量直线振动位移,后者可用于扭转振动的角位移测定。
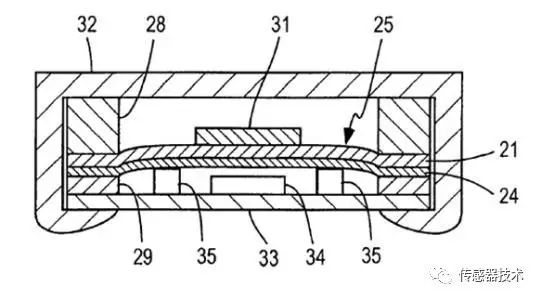
电阻应变式振动传感器
电阻式应变式振动传感器是将被测的机械振动量转换成传感元件电阻的变化量。实现这种机电转换的传感元件有多种形式,其中最常见的是电阻应变式片。
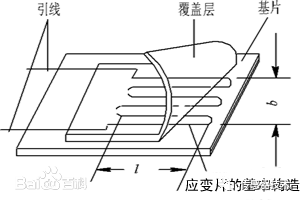
电阻应变片的基本构造如图,它一般由敏感栅、基底、引线、盖片等组成。敏感栅由直径为0.01-0.05mm、高电阻系数的细丝弯曲而成栅状,它实际上是一个电阻元件,是电阻应变片感受构件应变的敏感部分。敏感栅用粘合剂将其固定在基底上。基底的作用应保证将构件上应变准确地传递到敏感栅上去。
当试件受力变形时,应变片的敏感栅也获得同样的变形,从而使其电阻随之发生变化,而此电阻变化是与试件应变成比例的,因此如果通过一定测量线路将这种电阻变化转换为电压或电流变化,然后再用显示记录仪表将其显示记录下来,就能知道被测试件应变量的大小。
光纤振动传感器
随着光纤和光电子器件技术研究的不断深入,光纤传感技术得到了突飞猛进的发展。由于光纤传感器的体积小、质量轻、精度高、响应快、动态范围宽、响应快等优点,并且它具有良好的抗电磁干扰、耐腐蚀性和不导电性,所以在很多领域都应用广泛。
光纤振动传感器的出现已有30来年的历史,它是测量振动信号的。最初的光纤振动传感器是采用干涉式的结构,利用振动产生的光纤应变导致干涉仪信号臂的相位发生变化,但这种传感器结构比较复杂,不利于重复用。
相位调制型光纤振动传感器
位调制型光纤振动传感器运用一个相干激光光源和两个单模光纤。光线被分束后入射到光纤。如果干扰影响两根相关光纤的其中一根、就会引起位相差,这个位相差可精确地检测出。位相差可用干涉仪测量。有四种干涉仪结构。它们包括:马赫—泽德尔、迈克尔逊、法布里—帕罗和赛格纳克干涉仪。
下面是基于光纤Sagnac干涉原理。A和B是干涉仪的两个传感臂,起到传输光的作用。C是一段被绕成圆环状的光纤,是用来接收或感应外接信息的变化,22光纤3dB
耦合器被用来分解和合成干涉光束。
注入的光经过耦合器被分为两束,一束光由A到C再到B,最后传回到耦合器中;另一束由B到C再到A,最后传回到耦合器中,两束光相遇产生干涉。
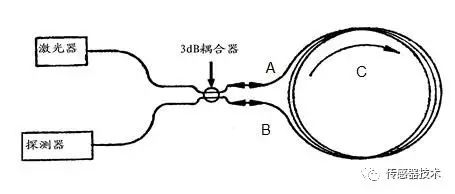
光纤Sagnac干涉振动传感器,是以光学Sagnac干涉仪为基础,利用单模光纤和3dB耦合器构成。该传感器能够探测微弱振动,当信号在固体中传播并作用于传感器的敏感元件时,传感器的输出光强度受到了信号的调制。通过检测输出光强度,并利用Fourier变换,获得信号的频率特征。
光强调制型光纤振动传感器
在光纤通信中,光纤耦合技术成熟的基础上,人们研制成功了一种全光纤器件的高性能耦合型光纤声振动传感器,以其测量带宽,灵敏度高,解调、制作成本低,使用简单等优点,受到很多人的关注。
为使单模光纤耦合器可作为传感器应用,研究人员分析了单模光纤耦合传感器的敏感机理,根据传感器耦合输出与传感器耦合区长度及耦合区振动频率存在一定的关系这一原理,可以制成光纤振动传感器,实现振动的检测。
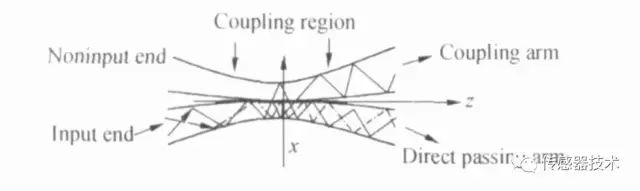
熔锥形光纤耦合器结构示意图
当入射光P0 进入输入端时,随着两个光波导逐渐靠近,两个传导模开始发生重叠现象,在双锥体结构的耦合区,光功率再分配,一部分光功率从“直通臂”继续传输,另一部分则是由“耦合臂”传到另一光路。
耦合器两输出端的输出功率之差与激振源的振动加速度成线性关系。因此,可以通过测量耦合器输出功率的变化,求出传感器加速度的值,实现对振动的测量。
此类传感器对应变的响应非常灵敏,耦合比的线性关系良好,且温度漂移影响可以稳定在0. 5 %以内。与压电振动传感器的测试对比,该传感器可更好地实现0~50 Hz 低频和4 kHz 高频振动检测。
波长调制型光纤振动传感器的原理及结构
波长调制传感原理为被测场/参量与敏感光纤相互作用,引起光纤中传输光的波长改变,进而通过测量光波长的变化量来确定被测参量。
由布拉格中心波长的数学表达式3.1.3,通过外界参量对布拉格中心波长的调制来获取传感信息,这个过程是光纤光栅的传感原理。
式中,纤芯的有效折射率是,T为光栅的周期。
由方程可知,是由光栅周期,反向耦合模的有效折射率决定的。其中,任何能使得这两个参数发生变化的物理过程都将引起光栅布拉格波长的漂移。在所有引起光栅布拉格波长漂移的外接因素中,最直接的是应变参数的改变。
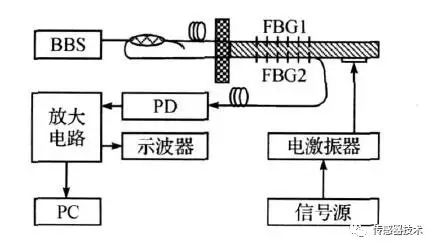
如下图所示,一台光纤光栅振动传感器,由机械悬梁臂一端固定在封装壳上,与待测的物台连接。在测量振动时,振动源和物台同时振动,而引起悬梁臂振动。
两个相同特质的光纤光栅,一个安装在悬梁臂下表面的对称位置作为信号解调光栅,另一个安装在机械悬梁臂的上表面上作为传感光栅。
由振动惯性力的作用下悬臂梁发生机械振动,带动两个光栅产生周期性的应变拉伸或收缩,从而引起FBG的布拉格波长发生变化,通过探测波长的信息前后是否一致,就能实现振动测量。
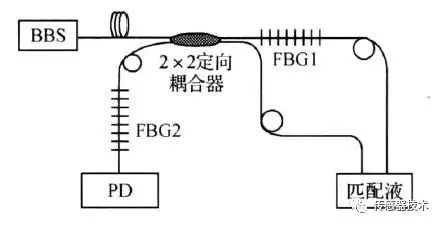
光通过2×2 光纤耦合器,送到传感头1上。之后,反射光信号返回又经2×2 光纤耦合器,经过传感头2上,传感头2的透射光强经光电转化,由光信号转换为振动的电信号,此时传感头2的作用是用作传感头1的光波长滤波器,将传感头1的波长改变转化成为光强信号变化。
光纤光栅振动传感器图
此光纤光栅振动传感器特点是用一种新的简单易行的解调技术,可以有效消除光纤光栅敏感信号的啁啾现象,有效减弱传感器的温度交叉敏感的问题,振动测量精度有显著的提高。
审核编辑:刘清
-
测振动传感器ZLDS1002013-12-10 3511
-
振动传感器2014-04-30 3580
-
c2051 振动传感器的工作原理是什么?2016-08-23 2274
-
振动的测量2018-01-23 6112
-
高精度悬浮轴振动测量传感器设计2018-11-01 1970
-
振动传感器的结构分类2018-11-05 2457
-
一文读懂什么是振动传感器2018-11-08 2566
-
HTM-930振动传感器2020-11-23 810
-
一文读懂传感器的原理与结构2022-01-13 2557
-
振动传感器测量振动的方式_振动传感器故障排除2019-10-16 5248
-
如何安装振动速度传感器2019-12-04 2348
-
振动传感器测量振动的方式2019-12-19 2206
-
振动传感器的原理 振动传感器的应用2024-03-08 5721
-
振动传感器是什么信号类型2024-10-22 2140
-
分贝单位与振动传感器的联系2025-02-17 1612
全部0条评论

快来发表一下你的评论吧 !
