

KUKA高级编程-坐标系-移动轨迹简析
工业控制
描述
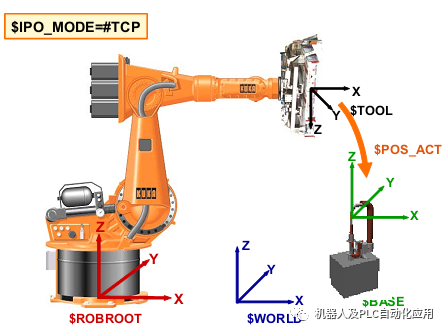
坐标系
以插补周期速率 (12 ms) 进行坐标变换
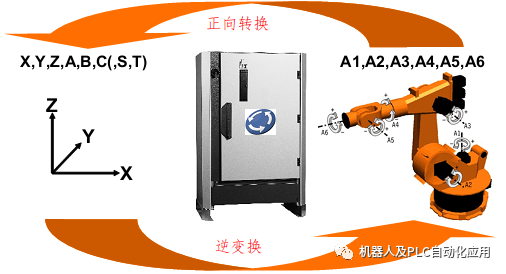
笛卡尔坐标系
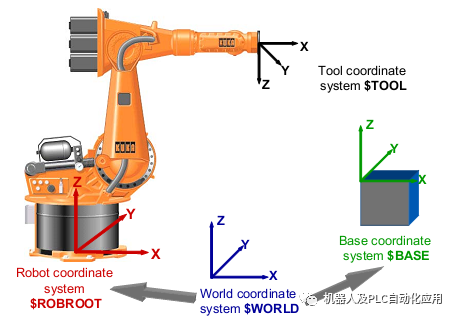
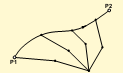
具有与基础相关的插值的运动序列
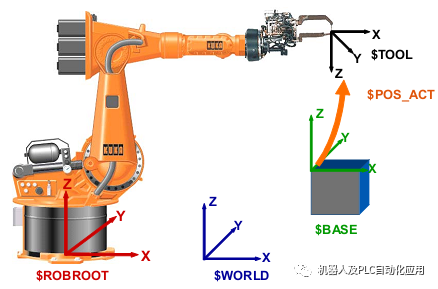
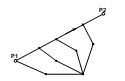
带有刀具相关插补的运动序列
轴运动 - PTP
运动类型概述
KUKA 机器人运动类型(插补类型)
PTP:轴的运动,两点之间的最快运动。控制器计算所需的角度差。
LIN:TCP运动,当前活动刀具的 TCP 沿直线从起点移动到终点。
CIRC:TCP运动,当前活动刀具的 TCP 沿定义的圆形路径移动。

• 在执行程序之前,必须首先建立程序段重合(BCO)。
• 这是通过在选择程序后按住开始键来完成的。
• 机器人以降低的速度自动移动
• 机器人到达编程路径后,可以通过再次按下启动键继续程序
建议第一次和最后一次运动都使用 HOME 跑,因为这代表了一个明确定义的非关键位置。
在自动外部模式下不执行 BCO 运行!
PTP 运动 - 简化:
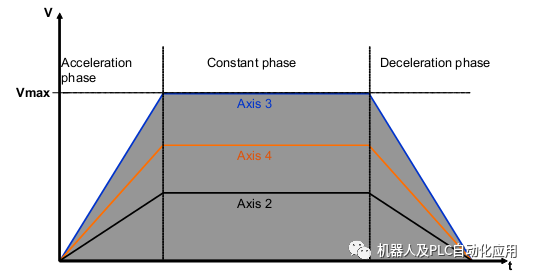
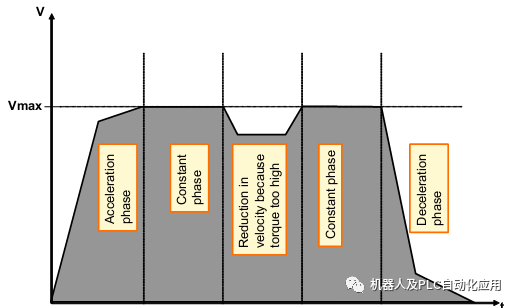
PTP 运动 – 更高的运动轮廓,较高的运动曲线用作 PTP 运动的标准。
PTP 运动 - 轴特定
在执行 PTP 运动之前,必须初始化轴速度和加速度。值以 % 指定。
DEF PTP_AXIS ( )
INT X
INI ;Initialization
...
FOR X=1 TO 6
$ACC_AXIS[X]=70 ;Modification of the axis accelerations
$VEL_AXIS[X]=70 ;Modification of the axis velocities
ENDFOR
...
PTP {AXIS: A1 0, A2 –90, A3 90, A4 0, A5 0, A6 0}
...
END
DEF PTP_AXIS ( )
INT X
INI ;初始化
...
FOR X=1 TO 6
$ACC_AXIS[X]=70 ;轴加速度的修改
$VEL_AXIS[X]=70 ;修改轴速度
ENDFOR
...
PTP {AXIS: A1 0, A2 –90, A3 90, A4 0, A5 0, A6 0}
...
END
PTP 运动 - 笛卡尔:使用笛卡尔坐标输入终点时,还必须定义基础坐标系和工具坐标系。
DEF PTP_AXIS ( )
INT X
INI
$BASE=BASE_DATA[1] ;Setting the base coordinate system
$TOOL=TOOL_DATA[3] ;Setting the tool coordinate system
FOR X=1 TO 6
$ACC_AXIS[X]=70 ;Modification of the axis accelerations
$VEL_AXIS[X]=70 ;Modification of the axis velocities
ENDFOR
...
PTP {POS:X 1025, Y 0, Z 1480, A 0, B 0, C 0}
...
END
DEF PTP_AXIS ( )
INT X
INI
$BASE=BASE_DATA[1] ;设置基础坐标系
$TOOL=TOOL_DATA[3] ;设置工具坐标系
FOR X=1 TO 6
$ACC_AXIS[X]=70 ;轴加速度的修改
$VEL_AXIS[X]=70 ;修改轴速度
ENDFOR
...
PTP {POS:X 1025, Y 0, Z 1480, A 0, B 0, C 0}
...
END
轴特定的绝对和相对运动
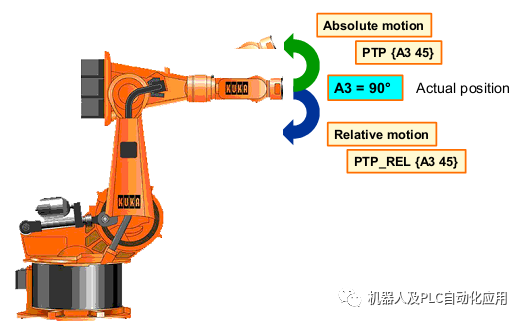
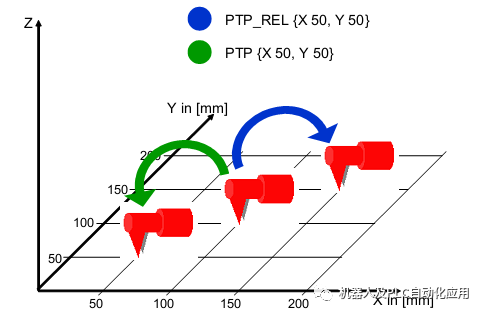
笛卡尔绝对和相对运动
连续路径运动 - LIN 和 CIRC
在执行 TCP 运动之前,必须初始化路径、回转和旋转速度和加速度。
$ACC.CP 路径速度
$ACC.ORI1 回转速度
$VEL.CP 转速
$VEL.ORI1路径加速
$ACC.ORI2 回转加速度
$VEL.ORI2 旋转加速度
调用基本包的初始化序列时,TCP 运动的速度和加速度的默认设置也预设为机床数据或 $CONFIG.DAT 中定义的最大值。
DEFDAT $CONFIG
...
; CP - MOVEMENTS
;----------------------------------
DECL CIRC_TYPE DEF_CIRC_TYP=#BASE
REAL DEF_VEL_CP=2.00
REAL DEF_VEL_ORI1=200.0
REAL DEF_VEL_ORI2=200.0
REAL DEF_ACC_CP=2.3
REAL DEF_ACC_ORI1=100.0
REAL DEF_ACC_ORI2=100.0
...
ENDDAT
程序中的第一个运动必须是 PTP 运动。
DEF CPMOTION ( )
INI
$BASE=BASE_DATA[1] ;设置基础坐标系
$TOOL=TOOL_DATA[3] ;设置工具坐标系
$VEL.CP=1.0 ;速度的修改
$VEL.ORI1=150
$VEL.ORI2=100
$ACC.CP=1.7 ;加速度的修改
$ACC.ORI1=80
$ACC.ORI2=80
...
PTP HOME
LIN {X 1050, Z 900} ;绝对坐标规格
LIN_REL {X 100, Y 250, Z 125};相对距离规格
...
END
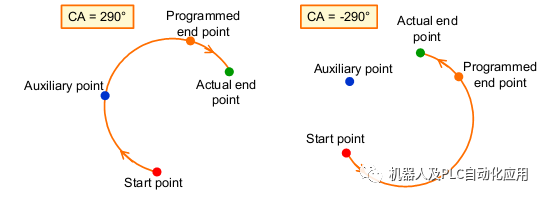
圆周运动:
CIRC Aux_Point , End_Point , CACircular_Angle
Aux_Point 辅助点坐标 - 通过聚合或数据列表中点的点名称指定
Circular_Angle CA = 圆角以度为单位的圆角
End_Point 终点坐标 - 通过聚合或数据列表中点的点名称指定
使用集合指定辅助点或终点时,请确保正确分配工具和基础坐标系!
CA > 0°按编程方向执行圆弧:起点-辅助点-终点
CA < 0°以与编程相反的方向执行圆弧:起点 - 终点 - 辅助点
“计算”出的目的地点的方位角与“修饰”的目的地点的方位角相同。
审核编辑:刘清
-
如何计算才能把坐标系转换成水平的坐标系?2019-07-31 2633
-
CAD制图软件新手攻略:坐标系及标注坐标2020-09-23 1923
-
解决电压方程在静止坐标系与运动坐标系转换问题2021-08-27 1680
-
什么是坐标系2009-12-31 5103
-
坐标系与鱼雷运动参数2010-01-06 6134
-
OPENGL坐标系介绍 世界坐标系和当前绘图坐标系区别2018-05-04 13414
-
一种基于Frenet坐标系的优化轨迹动作规划方法2018-07-09 14417
-
带你来剖析机器人的坐标系吧!2020-05-09 6208
-
小编科普一下KUKA C4机器人轨迹BASE与TOOL坐标系2022-12-27 9231
-
KUKA机器人-基础坐标系$BASE V4.18版2023-04-19 11618
-
自动驾驶各个坐标系2023-06-01 816
-
三坐标如何建立坐标系?2023-02-17 14708
-
世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系2023-07-03 16046
-
深度剖析机器人的四大坐标系2023-11-13 3316
-
应用卫星通信领域的一个坐标转换过程—机体坐标系与ENU坐标系的转换2023-12-27 8593
全部0条评论

快来发表一下你的评论吧 !
