

什么是4D成像毫米波雷达?4D成像毫米波雷达作用解析
MEMS/传感技术
描述
近日,特斯拉向欧洲监管机构提交车辆变更申请,证实最新自动驾驶硬件HW4.0即将量产上车。Teslarati等外媒爆料HW4.0硬件系统将配置一枚高分辨率毫米波雷达(可能为高精度4D成像毫米波雷达)。 自动驾驶领域的感知解决方案一直被分为两大阵营:一类是“纯视觉技术”阵营,主要是以摄像头为主传感器实现感知数据收集,以特斯拉为主,另一类则是“组合传感器”阵营,以摄像头、毫米波雷达、激光雷达等传感器进行融合感知。 在2022年10月份,特斯拉就已宣布,从旗下所有车型上移除超声波雷达。特斯拉身上的传感器仅剩摄像头,其自动驾驶也采用100%纯视觉方案。
目前,汽车行业多数采用的还是多感知融合方案。根据高工智能汽车研究院的前装定点监测数据显示,包括上汽、比亚迪、理想、吉利、红旗、长安等多个品牌已经定点或上车。
4D成像毫米波雷达有何魅力?能让特斯拉在半年内转变风向,摒弃纯视觉方案,重拾雷达传感器?
什么是4D成像毫米波雷达? 首先,我们先来按照别称拆解一下,4D成像毫米波雷达=“4D+成像+毫米波”。
4D:说明比普通的毫米波雷达多了一个测量维度;
成像:说明可以达到像素级的识别效果了;
毫米波:说明基本原理仍是“毫米波雷达”。
4D成像毫米波雷达作用解析:
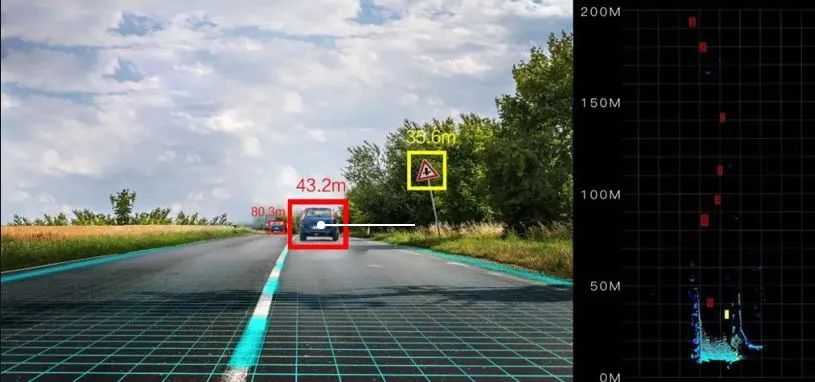
目前,4D成像毫米波雷达增加了高度维度的测量,具有高分辩率点云、AI目标识别和辅助高精定位的特点。可以检测物体的距离、相对速度和方位角(球坐标系中的角度测量值),还可以检测物体高于道路水平面的高度 ; 同时,4D成像毫米波雷达可以在300米以上的范围内创建道路的详细图像,捕捉和识别汽车周围物体的大小、位置和速度数据;远高于普通毫米波雷达的分辨率,使其每秒可生成30帧的完整4D图像。 4D成像毫米波雷达的主要优势:
1)环境适应性强,在雾、暴雨、夜晚及空气污染等各种天气和环境条件下,也能提供高可靠性的探测。
2)可实现对目标物垂直高度的测定,弥补现有毫米波雷达的缺点。
3)水平和垂直视场角和分辨率变大,点云密度的覆盖范围已超越了绝大多数车载激光雷达。
4)一定程度上可实现非视距感知,能够“看穿”墙壁、紧闭的门和其他固体物体,可探测到被前车挡住的前前车位置和速度。
5)与摄像头进行数据融合的难度比激光雷达低,验证成本较低。
4D成像毫米波雷达实际应用:
毫米波雷达作为智能汽车环境感知单元中的重要一员,在智能驾驶和自动驾驶系统中发挥了非常重要的作用,特别是一些涉及安全性的功能,比如AEB自动紧急制动系统、BSD盲区监测系统和ELK紧急车道保持系统等。 总结: 纯视觉路线行不通,多传感器超融合才是未来。愈来愈多的传感器、更强大的演算中心及对刹车、引擎、安全气囊等装置的控制,将形成更复杂的车载网络,这些智能性的辅助功能让驾驶人更轻松和安心地开车,也有助于减少交通意外的发生。
编辑:黄飞
-
拥抱自动驾驶,4D成像毫米波雷达已悄然崛起!2022-01-12 9319
-
4D成像雷达专栏 | 4D高分辨毫米波雷达概述2023-05-21 9092
-
剖析如何做好一款4D高分辨毫米波雷达2021-04-05 9593
-
傲酷雷达推出商用4D成像毫米波雷达 ST推出汽车卫星导航芯片2022-03-14 5306
-
什么是4D毫米波雷达?2022-07-14 14751
-
4D毫米波雷达加速了4D成像系统的可能性2023-01-04 2459
-
特斯拉确认搭载4D毫米波雷达!它为何备受车企追捧?2023-02-23 5171
-
什么是4D毫米波雷达?4D毫米波雷达与传统雷达有何区别?2023-03-13 17366
-
高阶自动驾驶落地“变局” 4D毫米波成像雷达有何作用2023-04-07 1300
-
4D毫米波雷达市场技术盘点2023-05-09 1305
-
经纬恒润新产品系列 | 4D成像毫米波雷达2023-05-17 1643
-
对比ZF和特斯拉的4D毫米波雷达设计,国产4D毫米波雷达迅速崛起2023-07-07 3241
-
国内4D毫米波雷达厂商名录2023-11-21 3897
-
4D毫米波成像雷达的测试要求都有哪些嗯?2024-01-18 2263
-
经纬恒润4D成像毫米波雷达亮相 CES 20242024-01-19 1518
全部0条评论

快来发表一下你的评论吧 !
