

开关电源学习笔记
描述
观察点
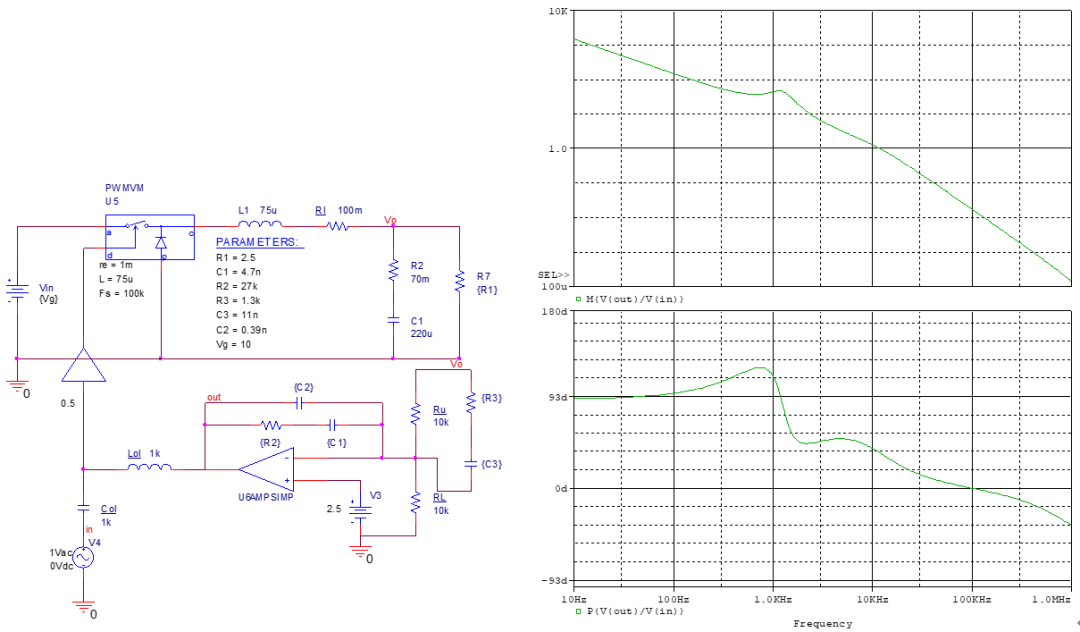
为了仿真变换器加上补偿网络后的传递函数,可以直接把环路在误差电压处断开,以占空比信号为输入,误差电压为输出,进行交流分析。 所谓的断开,其实可以与之前一样,接入一个大电感和大电容即可。

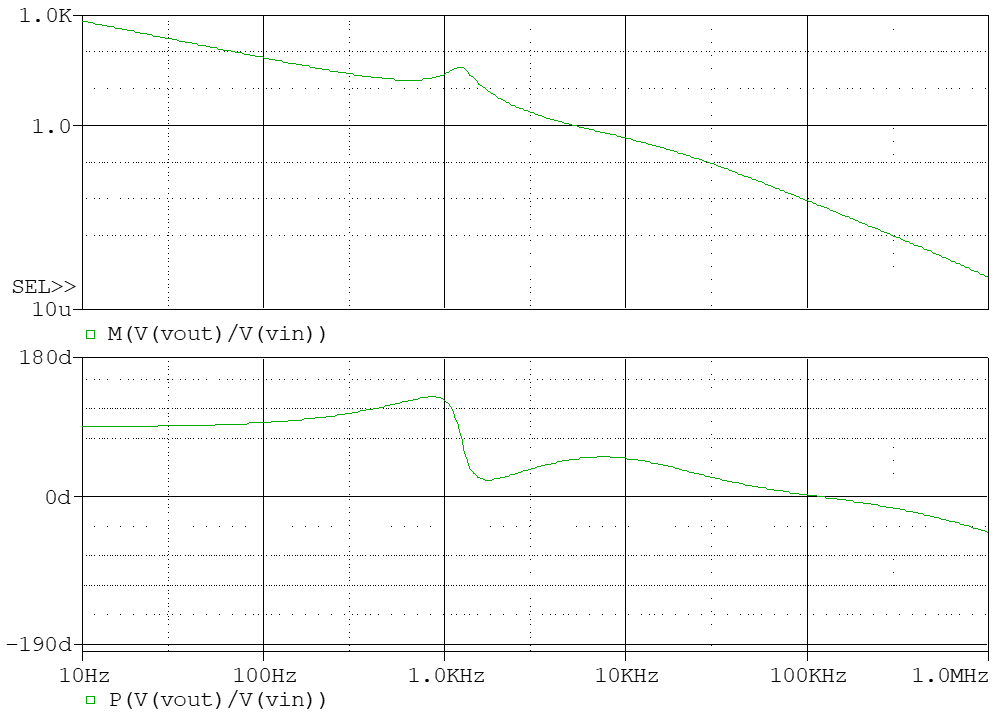
注意这里忽略了放大器引入的相移,因此相位从正的开始,相位裕度以与0°线的距离计算。 可见补偿后的系统相位裕度抬高了。
频域参数
当输出信号和控制信号之间的相位差减少为0°,则变成正反馈振荡器。
交叉频率处的输出容抗可以近似表示闭环输出阻抗,所以可以近似计算出输出瞬态阶跃电流作用下的输出电压脉冲
根据这个式子以及稳态纹波需求,可以确定交叉频率的取值。 不过对于有RHPZ的拓扑,一般就直接选定为RHPZ所在频点的30%,同时又应该保证交叉频率在LC谐振频率的5倍以上,给设计带来困扰。 对于没有RHPZ的拓扑,可以直接设定为开关频率的20%以下。 脉冲峰值固然与上式有关,不过恢复时间则由相位裕度决定。
构建补偿网络
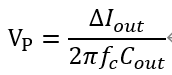
构造零极点的知识均已知晓。 值得一提的有构造RHPZ的方法,就是将原输入信号与高通滤波器后的信号相减

零点频率即RC分之一。
RHPZ是变换器间接能量传输的结果。 在CCM的Boost变换器中表现为,如果负载出现向上的阶跃,造成占空比信号变大,即减小,即电感向负载供电流的周期减小。 但是电感电流不会马上增大,而是以固定步长增加,这个过程中输出电流可能会反而比原来更小,这就是RHPZ的影响。 如果系统响应很快,那么在负载跃变瞬间,反馈环的占空比输出会因为输出电压的反向减小而迅速增大到1,使变换器无法工作,这也是Boost变换器环路设计要降低交越频率的原因。 一般选择在最低RHPZ的1/3处。 DCM时变换器仍存在RHPZ,但其被推到高频处,因此环路设计的困难相应降低。
各个频率响应对应的有源电路网络依次示下:
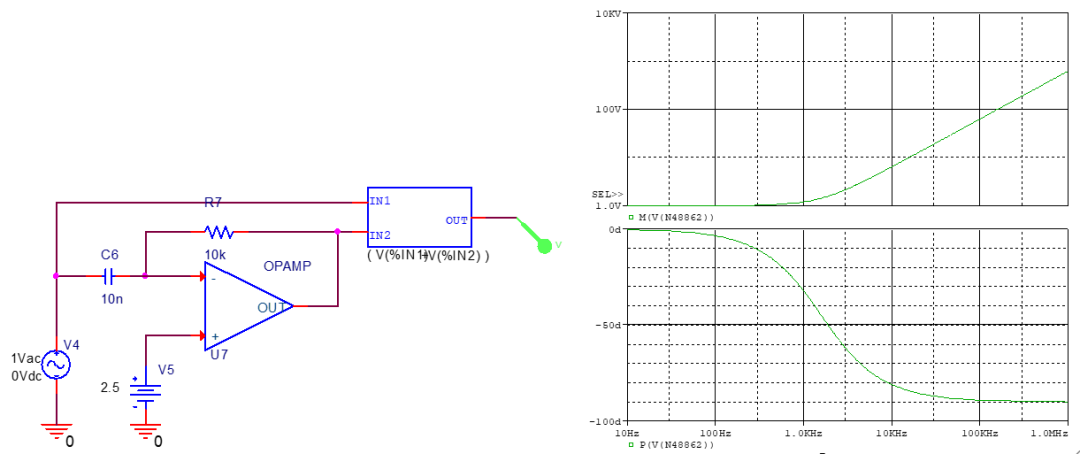
积分器
零极点
极点位置为
,零点位置为
,并且有积分器的效果。 这种补偿网络的特点是中频部分存在一个固定增益区,并且该区域的相位具有超前性质,相位的最大值出现在频率为

处。 用于电流模式和DCM。
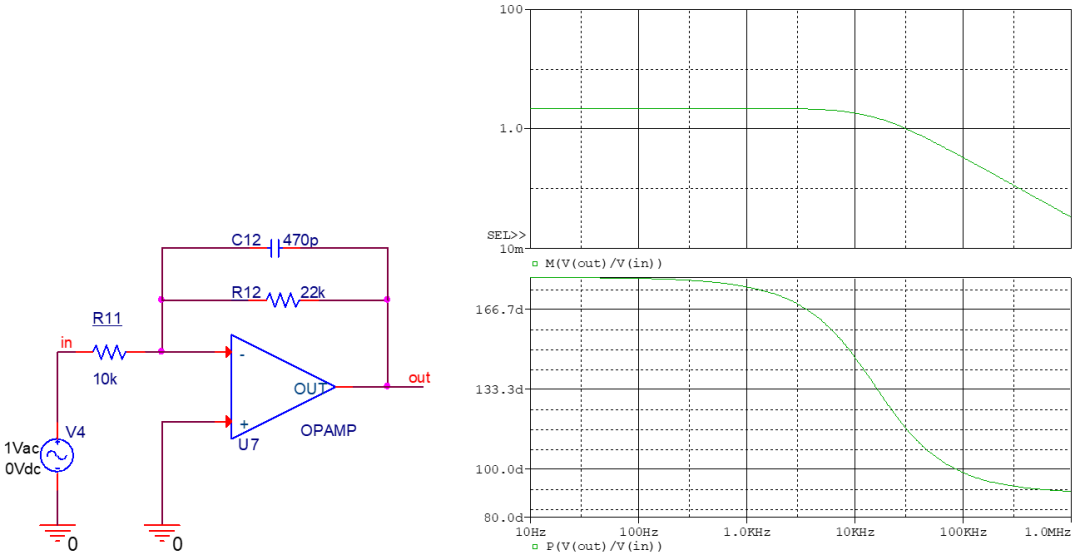
零极点对a
这是上面的特殊情况,即C12为0时,极点被排除,因此不存在高频段的增益下降,相位也一直接近同相。 在无需考虑ESR零点的场合可以用这个简化的补偿器。
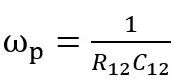
零极点对b
这也是上面的特殊情况,令C11为无穷大,则变成一个原点处的零点,相当于与积分器的效果相抵消,因此低频至中频都为固定增益。 明显的缺点是直流增益太低,稳态精度无法保证。
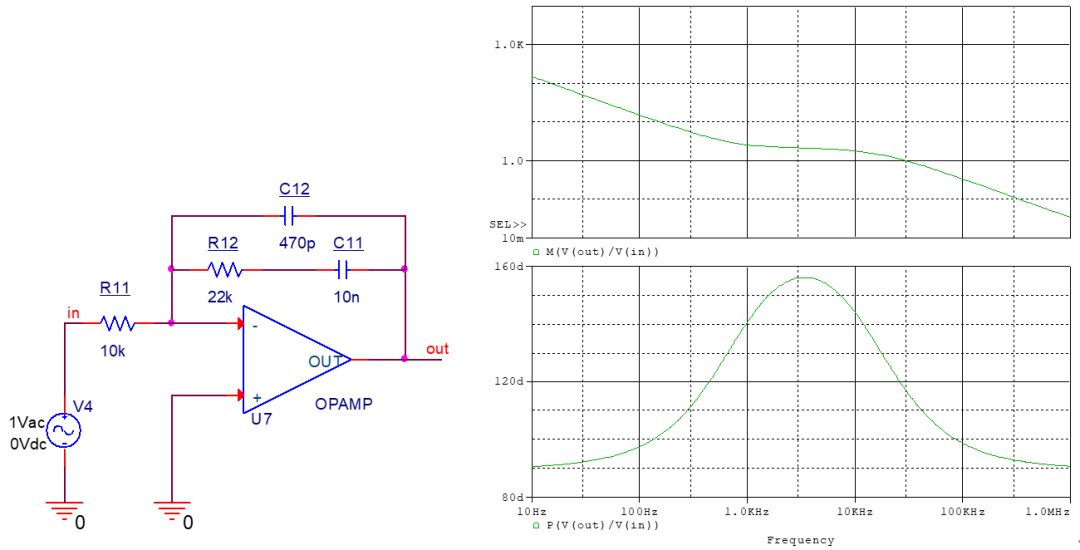
两个零极点对
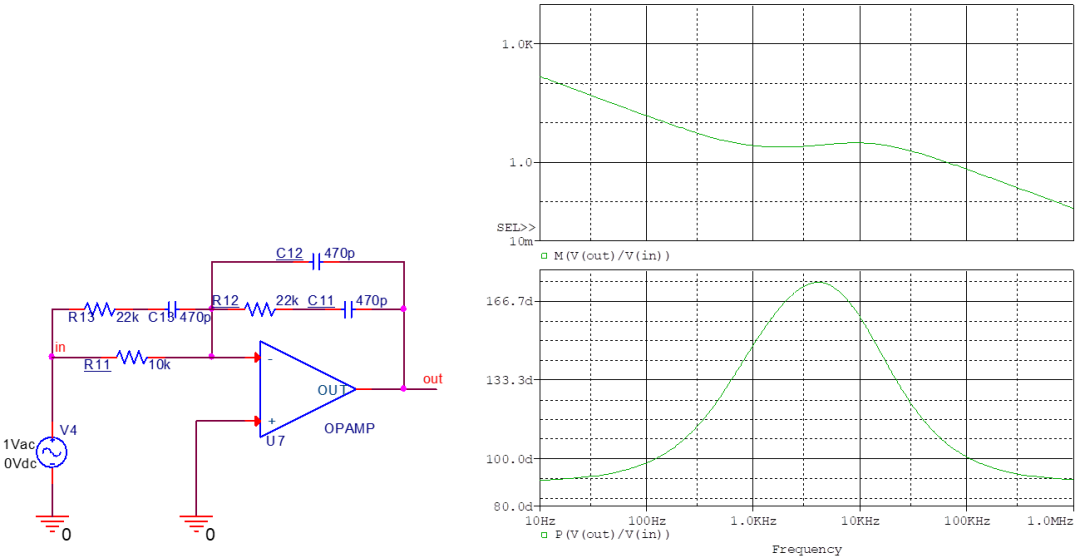
传递函数为
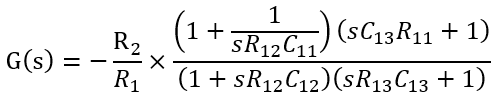
式中就可以看出零极点位置和直流增益。 比起单个的零极点对,两个零极点对提供了更大的直流增益和更大的超前相角,因此是最完备的一种补偿网络。
注意,实际的运算放大器必定自身附带一个低频的极点,其本身的增益就随频率的增大而减小,所以实际设计时还需要根据具体的运放进行参数设计。
K因子
一种从变换器开环特性得到k因子等参数值后,直接推导各类型补偿网络组件参数的方法。
首先看各类型补偿网络需要考虑的补偿参数。
积分器:极点在原点处,所以它只能通过平移增益曲线,改变系统的交叉频率,并引入一个90°的相移。
零极点对:除了具有积分器的平移曲线的效果外,还引入了一个超前相位,某点引入的相位增加量计算为
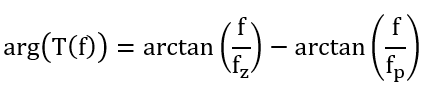
因此在交叉频率处,用k因子的方法可以令极点频率为kf,零点频率为k分之一f,则相位增加量

解出
根据所需要的相位裕度和变换器本身的相移,加上积分器引入的90°相移来确定

书中给出了不同k值下该补偿器的响应,k=1时退化为积分器,随着k增大,零极点距离增大,超前的相位增大,而直流增益减小。
双零极点对:与上面相似,这里假设双零点重叠,双极点也重叠,那么令极点频率为倍的f,则

解出
接下来的式子和关系与上述一致。
K因子设计步骤
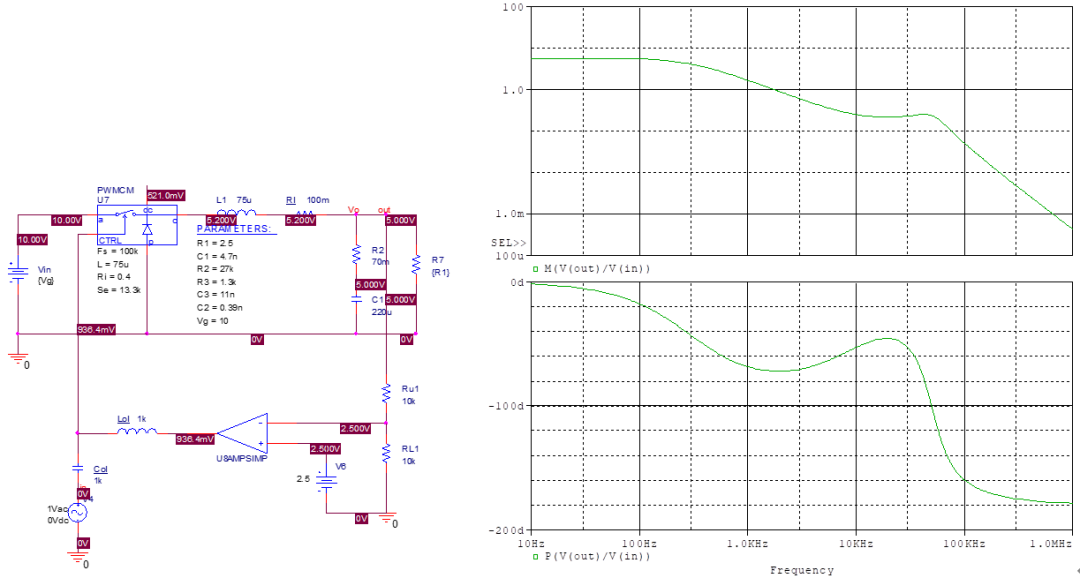
1、获得变换器交流响应。
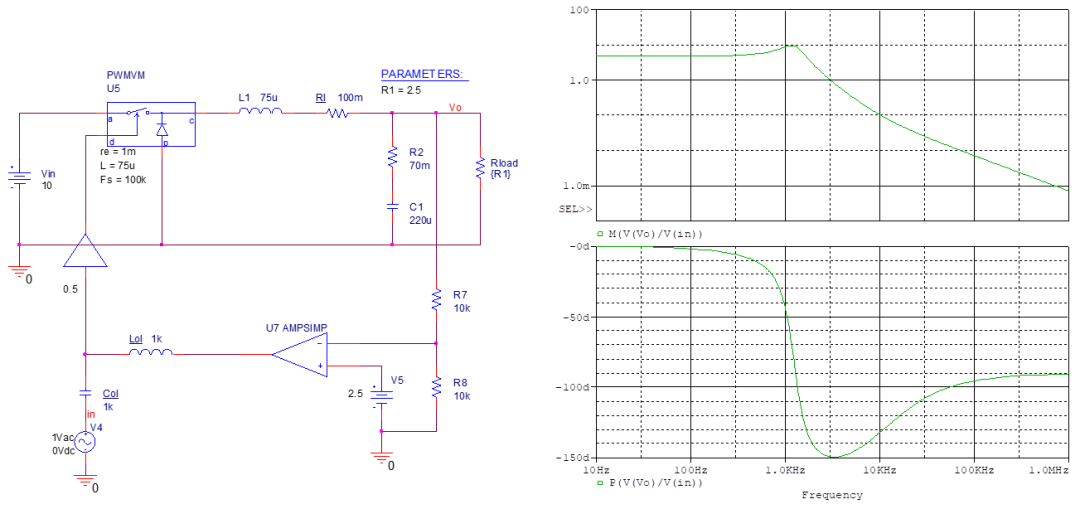
用游标看出交叉频率为3kHz,相移149°。
2、选择交叉频率和裕度。
开关频率为100kHz,而LC峰值频率为

如前所述应该选取6k以上的交叉频率,但是书中选取了5k,先按书中选取,后面再观察不同。
若选取5k,先观察变换器响应中5k处的数据,得到相移为-146°,增益为-9.2dB,期望的相位裕度为45°。
3、选择补偿器类型。
可见到变换器的响应相位滞后达到180°,稳妥起见可以选择双零极点对补偿器,最高可以补偿180°超前相位。
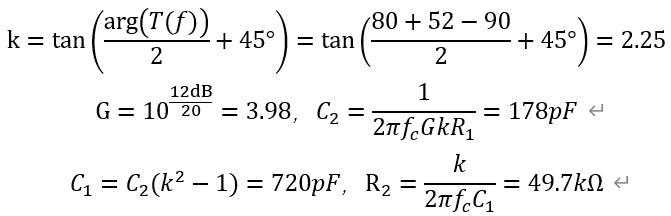
4、应用公式计算组件。
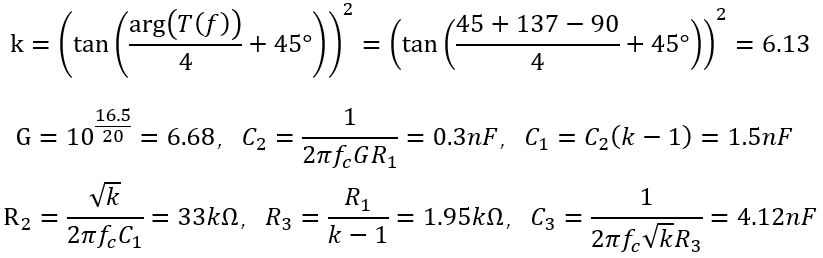
运用上页的公式,计算出k因子和元件参数
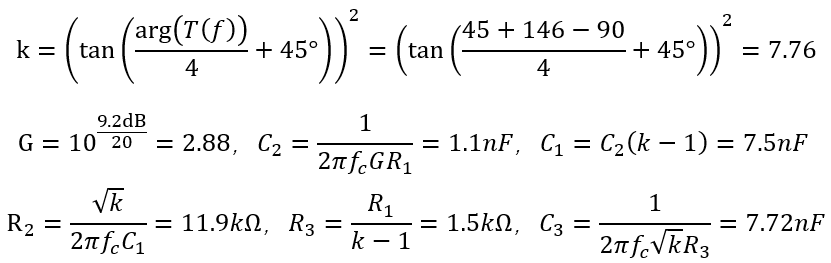
顺便可以计算出补偿器提供的零点和极点频率分别为1.8k和14k。
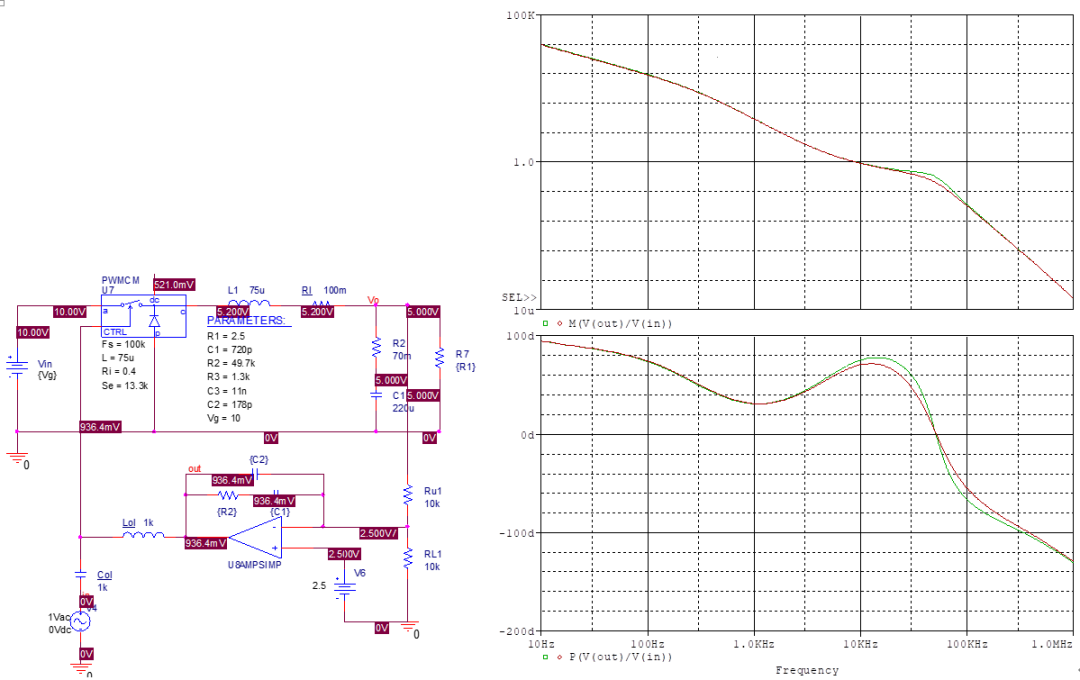
5、连接补偿器后开环扫描。
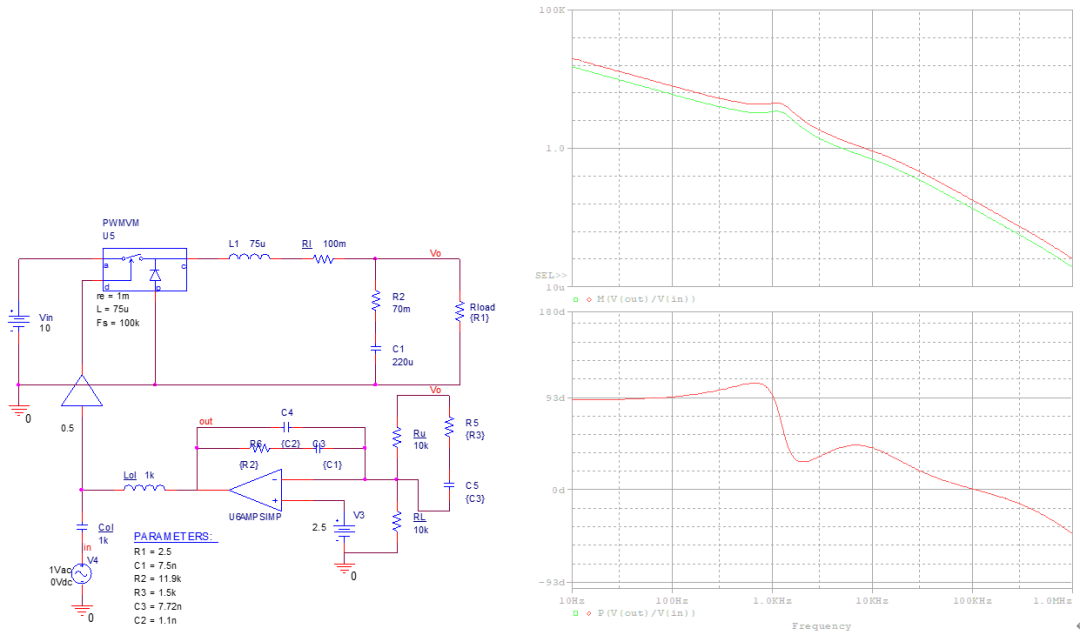
标准输入并带满载情况下的开环响应,交叉频率为5kHz,相位裕度为43°。 变化输入电压为20V,即图中红线所示,环路增益增加了1倍,即曲线被抬高了3dB,因此交叉频率变为8.45kHz,相位裕度为44°。
6、变化ESR和负载检查相位裕度。
以上测得是负载电阻为2.5Ω即电流为2A时的响应,若增大电阻至进入DCM模式,观察补偿器的功能是否受影响。 下图看出,因为变换器在低频处退化为一阶系统,低频段增益减小,所以交叉频率明显降低,分别为613Hz和1kHz,相位裕度分别为39.5°和59.5°,在不同输入电压下的相位裕度相差更大了,即对输入电压更加敏感。
如果变化电容的ESR,道理相同,负载恢复满载情况,若取值变为200m时如下图,交叉频率变为7.83kHz和15.56kHz,相位裕度变为74°和55°。 可见ESR的增大会使得其零点提前出现,使得交叉频率后移,并且提高中频段的相位。
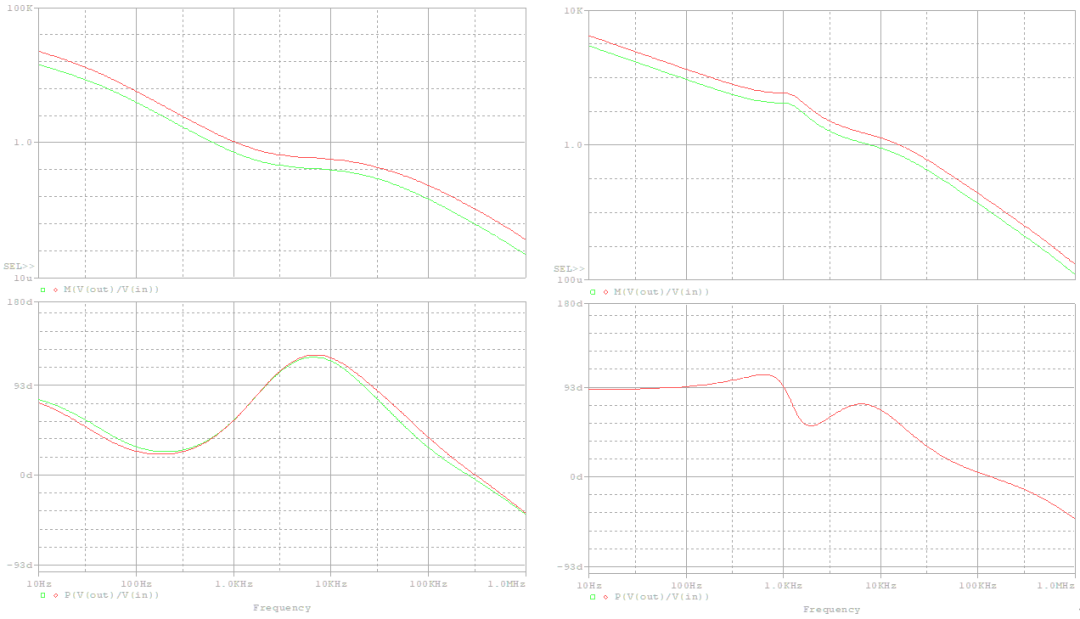
负载为50Ω时 ESR为200m时
7、观察瞬态响应。
前面给出了一个近似估计电流上升阶跃下,电压响应尖峰的计算式
如果作0.1A到2A的阶跃,大致算出峰值为

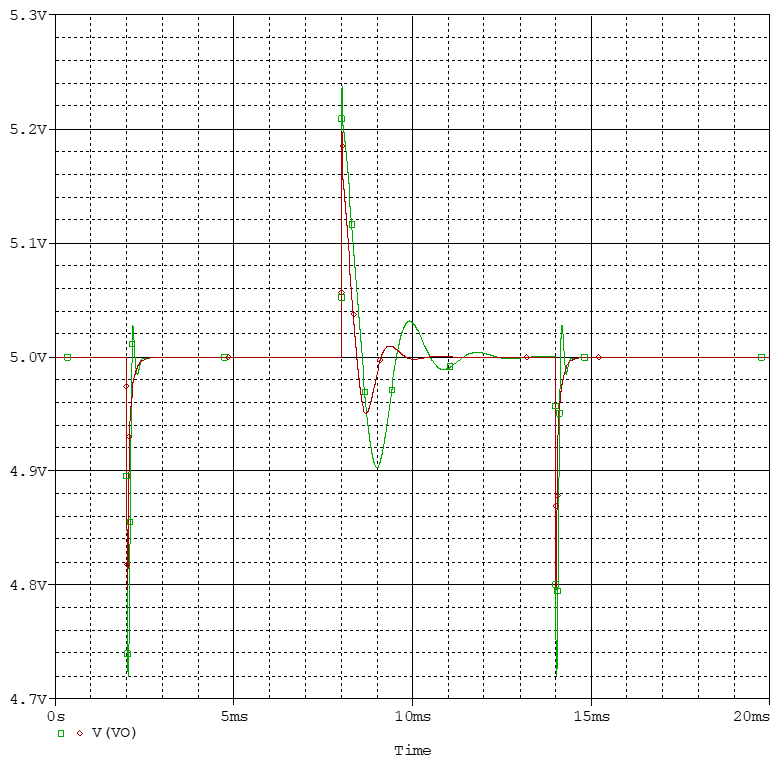
即从5V下降到4.725V。 搭建仿真模型,用ABM+脉冲信号源实现负载切换,结果如下
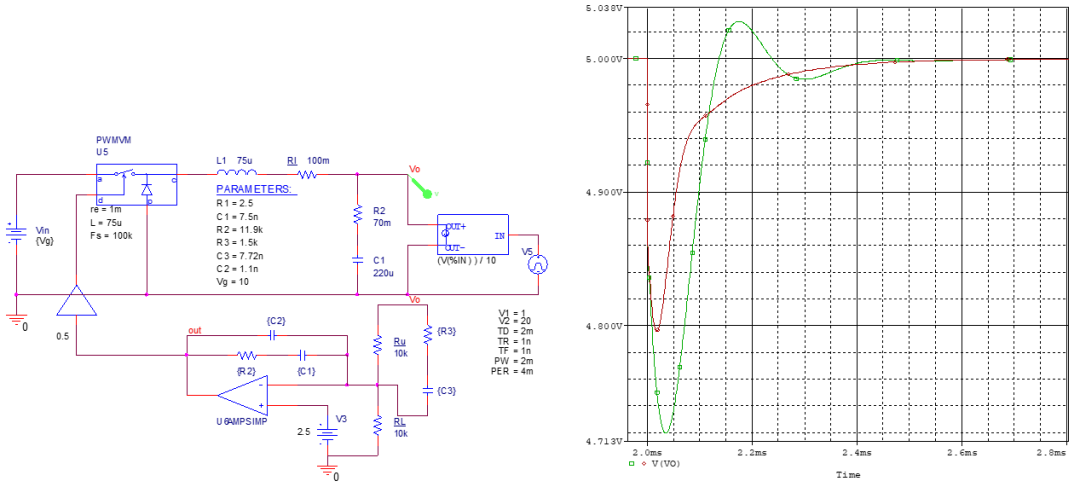
电压跌落为4.713V,与计算值近似相等,误差可能来自ESR等。 书中给出该式,只说明用来计算欠脉冲,若用来计算电流下降阶跃下的电压超调,则似乎不符合仿真结果的5.24V。
下图给出了全貌,明显,DCM下到CCM的切换很快,建立时间大约0.4ms,而DCM切换到CCM则很慢,需要大约5ms。
图中同样以红线示出了20V输入电压下的瞬态响应,说明Buck变换器中确实是以最低输入电压为最恶劣条件,而高输入电压下具有更好的动态性能。
除了输出电压响应外,还应观察误差电压的瞬态响应,这才是变换器在控制意义上的输出。
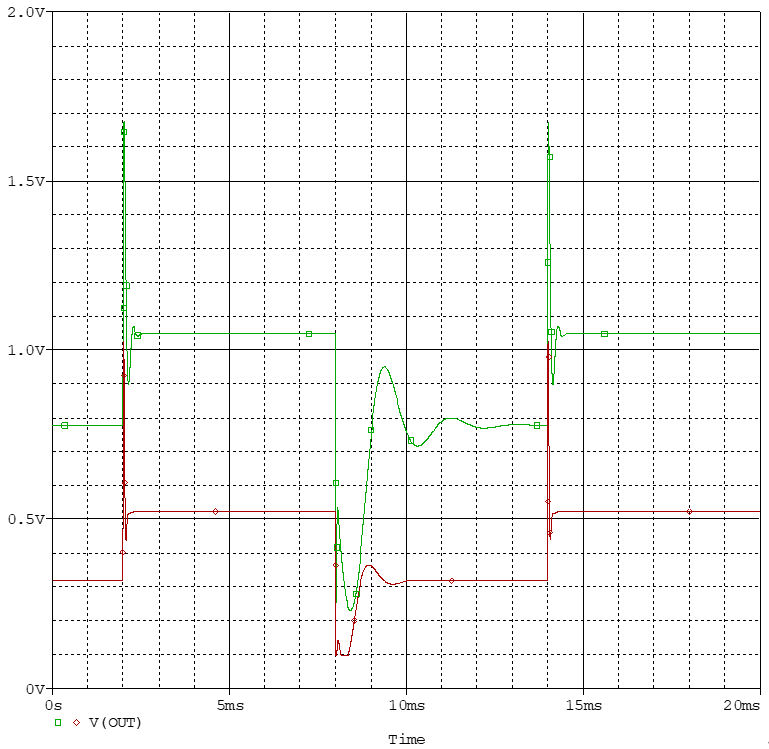
书中到后面也说明了当交叉频率为8kHz时,响应峰值降低为171mV,系统性能应是有所改善。 重复上述步骤,8k处的曲线数据为相移137°,增益-16.5dB,同样选择45°裕度,双零极点对补偿器,列式如下。
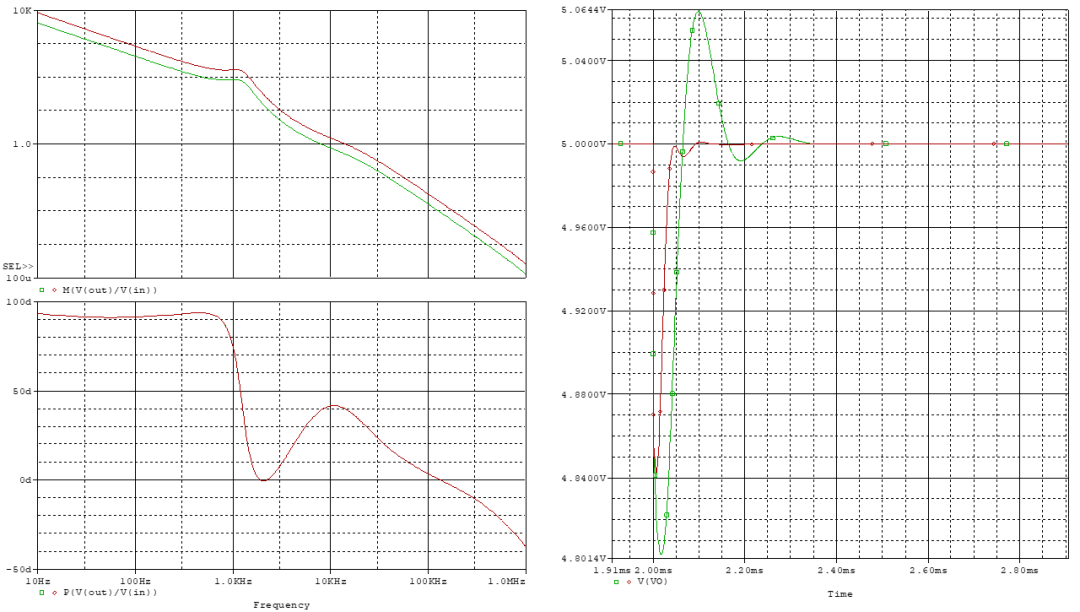
得到曲线如上,与前述相同,用输入电压分别为10V和20V时进行对比,10V时,交叉频率为7.98kHz,相位裕度为42°。 再观察瞬态响应,理论计算的峰值应为,图中为4.8V左右,相差不大,说明该估计式具有足够的精确度。 仔细观察上图中的相位曲线,可以看出一些问题。
K因子法的缺陷
该方法虽然简单,它对响应曲线形状忽略不计,即忽略了可能存在的谐振峰,而只考虑交叉频率。 这样有可能在交叉频率之前出现相位裕度减小到0的情况,如上图所示。 在交叉频率较高为8k时,出现了相位降低到0,增益仍为10以上的情况,这样在该频点很容易就有振荡现象,称为条件稳定。 这种问题出现的原因是K因子法在放置零极点时只考虑交叉频率的实现,而并未考虑零点位置与LC极点位置大致重叠这一要求,所以就会出现无法抵消LC极点引起相移的问题。 所以K因子法好虽好,若要妥善设计,还是应该采取一般的零极点放置法进行配置。
这种一般的方法,精确放置了每一个零极点,可以制作专用的计算表格。 书中提供了一种利用仿真软件进行参数计算的图纸,似乎只能用Ispice,Pspice尚不知可否。
用放置零极点的方法,就不会出现条件稳定性的问题了,图如下,相位裕度为36°。 这种方法的缺陷也正是K因子法的优点,即交叉频率无法精确定位; 另外,书中的理论和实验也表明,K因子法放置的零点频率较高,瞬态响应也会快于放置零极点的方法。 所以各存利弊。
电流模式补偿网络
以上讨论的内容均针对二阶的电压模式Buck电路。 对于电流模式控制来说,变换器的模型在低频呈现为一阶系统。
回顾一下电流模式控制的相关设置。 为避免次谐波振荡,需要加入斜坡补偿,在输入电压为10V时,电路中电感电流的上升和下降斜率一样都为66mA/μs,补偿斜率可以为其一半。 若采集电阻阻值为0.4Ω,则补偿斜坡电压为13.3kV/s。
同样运用K因子法,选择交叉频率为10kHz,相位裕度为80°。 先观察开环曲线。
得到10kHz处相位为-52°,增益为0.25=>-12dB。 因为相位滞后在90°以内,可以用零极点对的补偿器(2型)。
计算式如下
得到补偿后的特性曲线如图。 交叉频率为9.1kHz,相位裕度74°。 值得注意的是在输入电压分别为10V和20V时,两条曲线几乎重合,这是因为电流模式控制下,理论上的音频敏感度就是0,即输入电压的变化不会对系统造成影响。 略去了负载阶跃测试,因为可知道电流模式控制下系统在低频变为一阶系统,自然在阶跃作用下是不会产生振荡的,但峰值电压由输出电容决定,对电压模式和电流模式都是一样的。
此例可以看出K因子法对电流模式的设计还是很有优势的,因为一阶系统的特点,系统本身的相移就不大,所以不会出现条件稳定性的问题。
实际设计之TL431反馈
实际工业应用中已经很少用运算放大器设计补偿电路,而是将其与基准源合二为一,利用TL431内部的集成误差放大器就可以设计出高性能的补偿电路。 TL431的参考电压为2.5V,TLV431为1.24V,且电流更小。
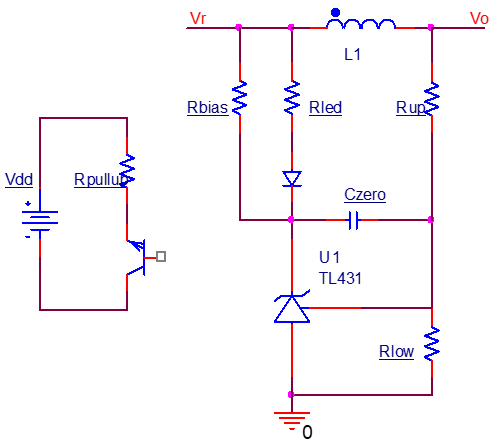
在一般的反馈环路中,连接光耦LED的支路为快支路,分压网络为慢支路,如图所示。 对于小信号的研究,由于TL431的动态电阻与Rled比起来小得多,忽略后由KVL得

VFB为最终反馈回到芯片FB引脚的电压。
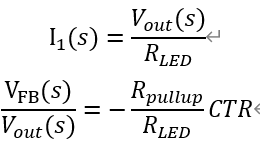
就得到了快通道的传递增益,在高频区难以降低,使放置零点成为一个问题。
整个反馈可以看作快慢通道的叠加,与慢通道叠加后,推导反馈环路的传递函数

即

表明了系统中存在原点处极点和一个零点。
必须要明白的一点是,这个电路是实现前面所述补偿网络的方法。 对比零极点对补偿网络,还缺少一个非原点处的极点,可以直接在光耦的输出与地之间接入电容。 得到的零极点位置分别为

注意到第一条式子的关系,所以曲线的斜率刚好在0dB处发生转折,结果就是中频增益G与零极点位置无关。
下面用TL431实际设计补偿器。
K因子+431
用k因子法直接把零极点放置在
构造零极点对的补偿器做法较为简单,基本上与前述的一般方法一致,直接代入计算即可,得到的响应与前面用运放搭建的结果是一致的。
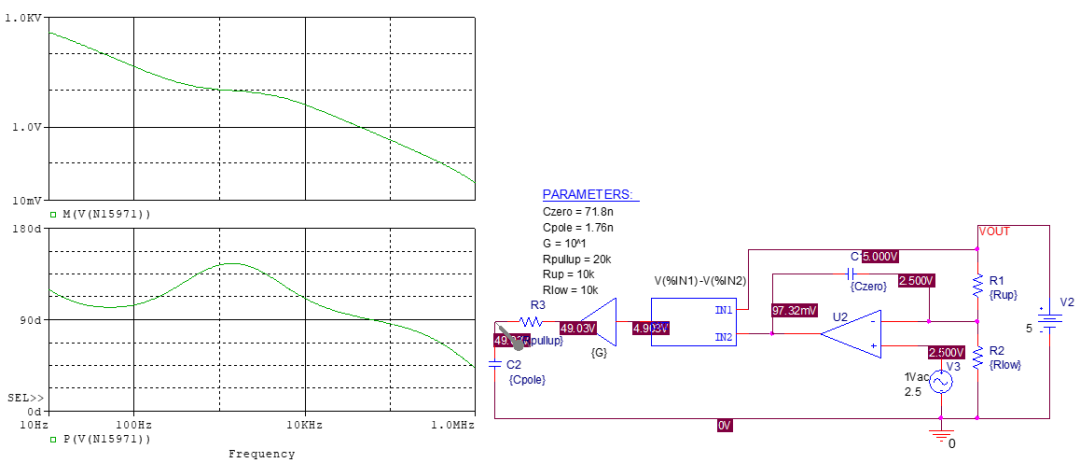
如果搭建双零极点对补偿器,则需要考虑快通道的影响,即高频区存在的增益,它使得直接在上位反馈电阻并联零点的做法没有作用。 因此需要在快通道的LED电阻直接并联RC网络,并联后,原本LED电阻的位置上阻抗变为
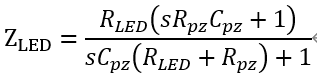
完整的传函变成

可得到两对零极点的位置。 如果零点和极点的位置都重合,可以求出
G为期望的交叉频率处增益。 之后就可以根据零极点位置求出RPZ和CPZ的值。
一般不会用TL431搭建这种补偿器,因为LED电阻对零极点位置存在影响,还是用运放搭建较好。
TL431偏置电流
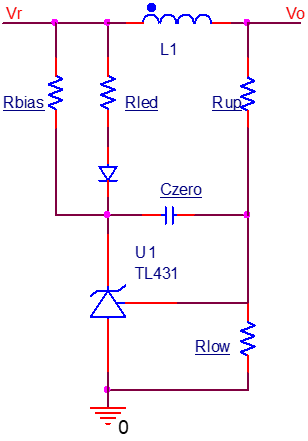
431需要一个从阴极流入的电流满足要求,必须大于1mA,否则其开环增益会大大减小,使稳压效果变差。 一般不能依靠LED电阻提供的电流,因为光耦的CTR会使期望的电流衰减,最后不能达到1mA的要求,所以应该另外增加偏置电阻,通过输出电压直接拉一个电阻到TL431阴极,或者在LED两端并联一个电阻都是可行的。
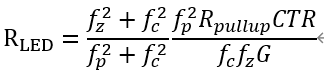
在仅仅靠LED电流提供偏置时,要考虑最大的光耦传输比。 先计算光耦输出端需要的电流值为
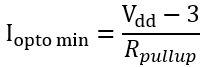
其中Vdd为控制器的逻辑电平,3V是假定反馈引脚的电压上限值。 则LED的电流最小可能是
假设Vdd=5V,上拉电阻10k,CTR最大为100%,此时电流200μA,不满足要求。 所以要加入偏置,由最小电流要求得到偏置电阻的取值
其中Vf为LED的压降,典型值为1V。 若要求偏置电流2mA,LED电阻2.2k,Vdd=4.8V,CTR取典型值为30%,得到偏置电阻为830Ω。
此外还有一个地方的偏置电流需要注意,即从电阻分压过来的电流,进入TL431的参考节点。 进入该节点的电流数据表给出为2~4μA,据此可以计算低端电阻值
不过如果选择高端电阻的电流远大于μA级别,比如为1mA,就可以忽略这个电流值了。 对于低功耗应用来说,还是应当设定为更低的电流值,这时需要考虑这个电流的限制。
关于光耦
光耦的输出端中,集电极和基极之间存在较大的电容,会影响可用带宽,此带宽由电容和上拉电阻共同决定。 从数据表中给出的下降时间和测试电阻值可以计算出结电容值
一般为nF级别。 因此对要求较大带宽的电源,光耦会造成较大的影响,或者使用阻值很小的上拉电阻。
另外,光耦还存在着一个高频的极点。
跨导放大器
输出电流为两个输入电压差的倍数。 特别之处在于跨导放大器不存在局部反馈,相当于开环运行,输入端也没有虚地的情况,而且分压电阻的下位电阻在环路中起作用。 常在PFC中应用。
-
开关电源学习笔记之MOS管2022-01-11 871
-
开关电源学习笔记10 --- Zeta变换器2021-11-07 654
-
.基本DC-DC变换器开关电源学习笔记2021-10-29 3316
-
开关电源学习笔记0 --- 初识开关电源2021-10-22 1534
-
开关电源学习笔记2012-06-16 530
全部0条评论

快来发表一下你的评论吧 !
