

高速电机驱动技术及其发展趋势
工业控制
描述
PART 01 研究介绍
高速电机因其功率密度高、体积重量小、工作效率高等明显优势,受到越来越广泛的关注。高效稳定的驱动系统是充分发挥高速电机优异性能关键所在,该文主要从控制策略、转角估算以及功率拓扑设计等方面,分别分析高速电机驱动技术的难点,并总结归纳国内外当前研究成果,之后对高速电机驱动技术及其发展趋势进行总结展望。
PART 02 研究内容
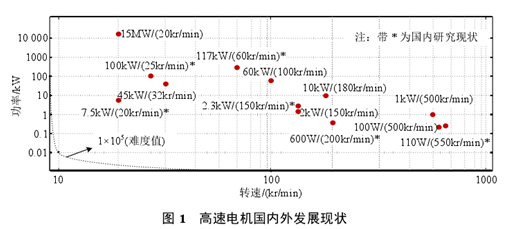
高速电机在航空航天、国防安全、生产生活等领域有着广泛应用,是当今必要的研究内容和发展方向。在电主轴、透平机械、微型燃气轮机、飞轮储能等高速负载场合,高速电机的应用能够实现直驱结构,省去变速装置,显著减小体积重量与维护成本的同时大幅提高可靠性,具有极其广阔的应用前景。高速电机通常指转速超过 10kr/min 或难度值(转速和功率平方根的乘积)超过 1×105的电机,图 1 给出了当前国内外高速电机部分代表样机相关数据对比,图 1 中曲虚线为1×105难度值等值线。
一、高速电机驱动技术难点
1、高基频下系统稳定性问题
当电机在高运行基频状态下时,由于受模/数转换时间、数字控制器算法执行时间以及逆变器开关频率等限制,高速电机驱动系统载频比较低,导致电机运行性能明显降低。
2、基频高精度转子位置估计问题
高速运行时,转子位置的精度对电机的运行性能至关重要。由于机械式位置传感器可靠性不高,且体积大、成本高,故在高速电机控制系统中常采用无位置传感器算法。但在高运行基频条件下,采用无位置传感器算法容易受到逆变器的非线性以及空间谐波、环路滤波器和电感参数偏差等非理想因素的影响,造成明显的转子位置估算误差。
3、高速电机驱动系统纹波抑制问题
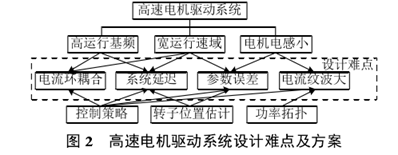
高速电机电感小,不可避免存在电流纹波大的问题。大电流纹波导致的额外铜损、铁损、转矩脉动以及振动噪声,会大大增加高速电机系统损耗、降低电机运行性能,且高振动噪声带来的电磁干扰会加速驱动器老化。上述问题极大影响了高速电机驱动系统性能,低损耗硬件电路优化设计研究对高速电机驱动系统至关重要。综上所述,高速电机驱动系统的设计,需要综合考虑多项因素,主要包括电流环耦合、系统延迟、参数误差以及电流纹波抑制等技术难点,是一个高度复杂的过程,对控制策略、转子位置估计精度以及功率拓扑设计提出了极高的要求,如图2所示。
二、高速电机驱动系统控制策略
1、高速电机控制系统建模
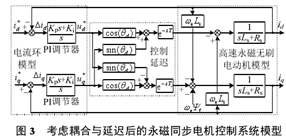
高速电机驱动系统高运行基频、低载频比的特点,电机自身耦合以及延迟对系统的影响已不可忽略。故在考虑上述两大因素条件下,对高速电机驱动系统重构建模分析,是进一步提升高速电机驱动性能的关键。
2、高速电机解耦控制技术
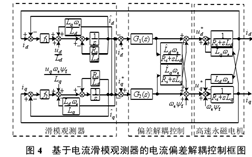
在高性能电机驱动系统中应用最为广泛的是FOC 控制技术,针对高运行基频造成的系统耦合严重问题,目前主要的研究方向为解耦控制策略。当前所研究的解耦控制策略主要可分为:基于模型的解耦控制策略、基于扰动补偿的解耦控制策略与基于复矢量调节器的解耦控制策略。基于模型的解耦控制策略主要有前馈解耦和反馈解耦,但该策略对电机参数敏感,在参数误差较大的情况甚至会导致系统不稳定,且无法做到完全解耦,动态解耦性能差,因而限制了其应用范围,后2种解耦控制策略是当前的研究热点。
3、高速电机系统延迟补偿技术
解耦控制技术能较好地解决高速电机驱动系统的耦合问题,但延迟引入的时延环节仍存在,故需要对系统延迟进行有效的主动补偿。目前系统延迟的主动补偿策略主要分为2种:基于模型的补偿策略及不依赖模型的补偿策略。
PART 03 研究结论
综合当前学界在高速电机驱动技术方面的研究成果,结合现有问题,高速电机发展和研究方向主要有:1)高基频电流精准预测及主动补偿延时相关问题研究;3)高速电机高动态性能控制算法研究;4)超高速电机转角位置精确估测及全速域转子位置估算模型研究;5)高速电机位置估算模型中误差全补偿技术研究;6)高速电机功率拓扑高频高损耗问题研究。
编辑:黄飞
- 相关推荐
- 热点推荐
- 电机驱动
-
高速电机驱动技术及其发展趋势2023-03-24 1810
-
交流调速及其相关技术的发展现状和发展趋势2021-09-27 1594
-
谈谈高速CMOS图像传感器及发展趋势2021-06-03 1821
-
高速球是什么?有什么技术发展趋势?2021-05-31 2064
-
无线技术的下一波发展趋势是什么?2021-05-26 1944
-
电子技术在现代汽车上的应用及发展趋势是什么2021-05-17 4140
-
蓝牙技术未来的发展趋势2019-03-29 4045
-
光模块的封装技术及其发展趋势2017-11-06 2722
-
电动汽车电动机驱动技术及其发展2016-09-08 6368
-
电动汽车电机技术及其发展研究2016-06-14 4743
-
新能源汽车电机驱动关键技术及发展趋势2016-05-12 5740
-
TPMS技术与发展趋势2009-10-06 20825
全部0条评论

快来发表一下你的评论吧 !
