

机器人导航技术:SLAM创新点前世今生分析
描述
将一个机器人放入未知环境中的未知位置,是否有办法让机器人一边逐步描绘出此环境完全的地图,同时一边决定机器人应该往哪个方向行进?

SLAM(simultaneous localization and mapping)全称即时定位与地图构建或并发建图与定位,它主要的作用就是让机器人在未知的环境中,完成定位(Localization),建图(Mapping)和路径规划(Navigation)。由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。目前,SLAM技术被广泛运用于机器人、无人机、无人驾驶、AR、VR等领域。
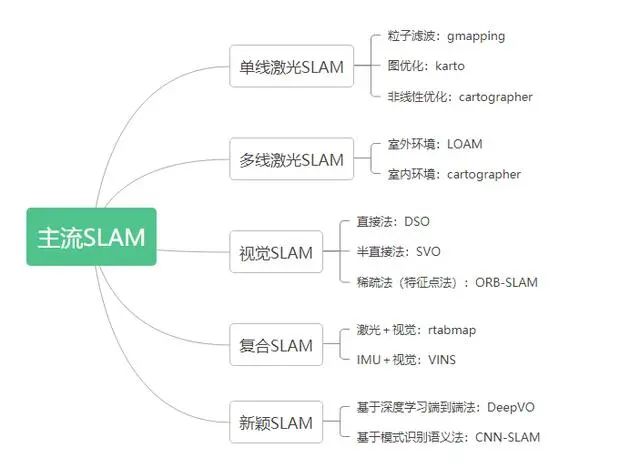
主流的slam技术应用有两种,分别是激光slam(基于激光雷达lidar来建图导航)和视觉slam(vslam,基于单/双目摄像头视觉建图导航)。
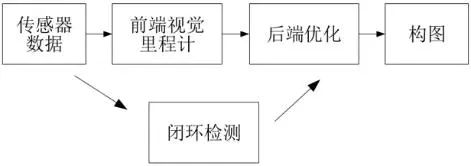
经典的SLAM系统一般包含前端视觉里程计、后端优化、闭环检测和构图四个主要部分。
很多同学都觉得Slam方向难以入门,也难以学深。但其实相对来讲,不像其他很多方向,很多的东西大家都已经做了,并且做的很不错,要想发论文或者找创意突破比较吃力。slam方向还有很多深层次的多领域结合应用的内容还比较少,并且slam更深的内容还有很多东西需要做。
3月21日,在机器人slam、无线感知、多模态融合、智能视觉领域有深厚落地经验的Wills老师,将系统性为大家讲解机器人导航相关技术,并带大家分析slam创新点的前世今生。
作为大厂技术顾问,Wills老师在机器人slam领域已经颇有建树,同时作为SCI国际会议、期刊审稿人,Wills老师在论文创新点挖掘方面也经验丰富。
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV2017-06-10 8371
-
机器人想要实现智能移动,必须具备超强的自主定位导航能力2018-01-03 4126
-
SLAM不等于机器人自主定位导航2018-08-24 7204
-
服务机器人是如何实现自主定位导航的?2018-10-10 3322
-
中国服务机器人定位导航技术现状分析2018-10-11 3742
-
SLAM技术的应用及发展现状2018-12-06 15567
-
让机器人完美建图的SLAM 3.0到底是何方神圣?2019-01-21 6017
-
机器人基础书籍2019-05-22 3666
-
【Toybrick RK3399Pro AI开发板试用申请】机器人激光与视觉融合的导航模块2019-07-03 4811
-
SLAM技术目前主要应用在哪些领域2020-12-01 3357
-
激光SLAM与视觉SLAM有什么区别?2021-07-05 4739
-
激光SLAM技术在机器人运动控制系统中的应用是什么2021-07-30 3500
-
SLAM技术:机器人自主移动的关键技术2018-08-27 3590
-
SLAM+运动规划=机器人自主定位导航2020-03-30 3535
-
浅析基于SLAM的机器人自主定位导航2023-08-03 1850
全部0条评论

快来发表一下你的评论吧 !
