

飞机震动桨频分析
电子说
描述
由于无人机通过加速度计、陀螺仪等惯性传感器来测量自身的导航信息,而机体振动,会影响加速度计、陀螺仪等惯性传感器的测量,使得测量噪声加大,进而影响控制效果。
振动的分析主要通过原始传感器的数值来看。通过DataViewer查看原始的加速度计信息,如下图1所示,也可以查看原始的陀螺仪输出,如下图2 所示。如果加速度计的输出,噪声的峰峰值超过了5g(即5000mg),或者陀螺仪的噪声超过了50°/s(即872mrad),则应该考虑改进机架结构,降低机架振动水平以改善飞行性能。
值得注意的是,飞机的振动主要集中在加速度计的z轴和陀螺仪的x、y轴,因此需要分析无人机的振动特性主要观察上述三个轴的输出值。
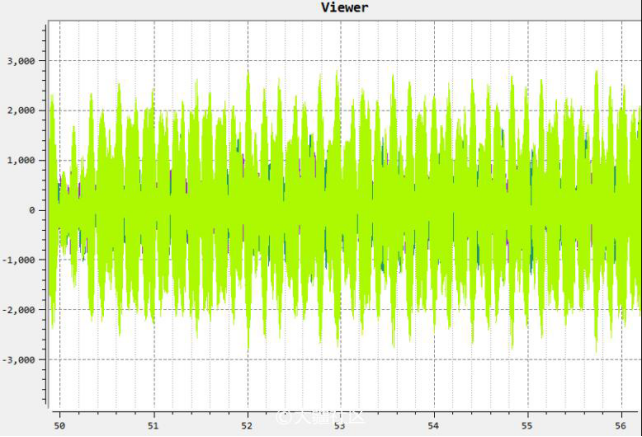
图1:三轴陀螺仪原始输出(只有独立飞控开放了这个数据查看,下同)
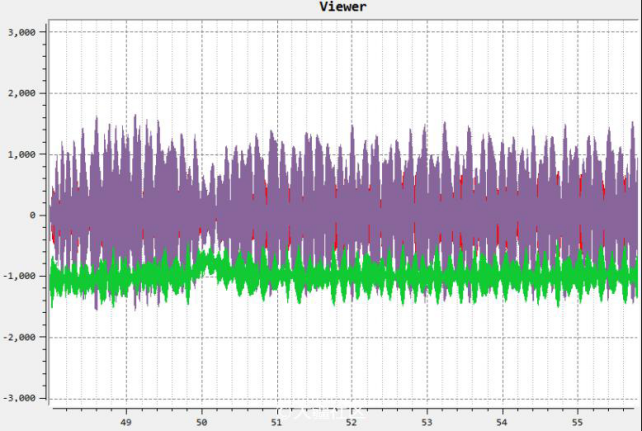
图2:三轴加速度计原始数据
无人机的机体高频振动主要来源为电机的转动,所以对于电机转速或螺旋桨的转动频率的分析尤其重要,桨频即指螺旋桨的转动频率。对于桨频的分析主要借助快速傅里叶变换工具(FFT)来实现,首先将原始陀螺仪数据画到绘图区,然后点选FFT工具,并使用鼠标左键点选后不放,使用矩形区域选定需要做FFT分析的曲线区域,接着分析结果就会出现在新的标签页中。

如下图示。可以看到在76Hz左右出现了一个峰值,在150Hz出现了第二个峰值,它们分别是一倍桨频点与二倍桨频点,通常第一个峰值为桨频的频率点,即76Hz。
通过对加速度计原始数据做FFT也可以得到桨频信息,如图所示。
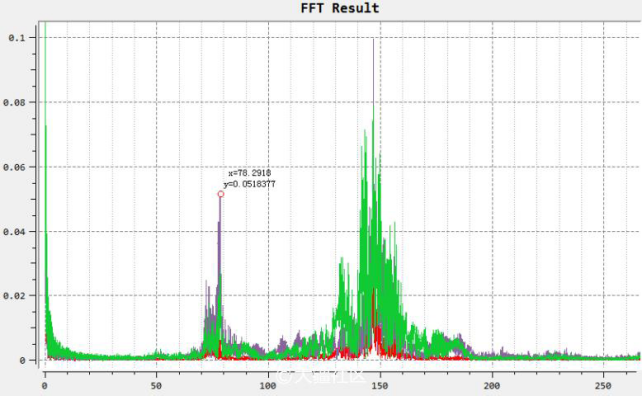
加速度计原始数据FFT
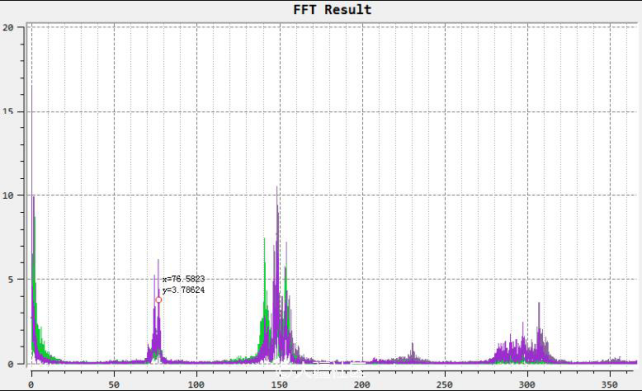
陀螺仪原始数据FFT
桨频对于飞行品质有一定影响。建议桨频不低于40Hz,否则会造成控制器对于低频噪声衰减不足,在控制效果上变现为无人机抽动、振动等问题。
机架震动主要来源于:
(1)机架柔性。①机架的柔性是震动的来源之一,过于柔软的机架会引入更多震动,因此机架应该尽可能的保持刚性。碳纤维机架具有较好的抗扭矩和抗弯曲特性,是较为理想的机架材质选择。②机臂与中心板的连接处应尽可能保持刚性,连接牢固,且不要留有活动间隙。
(2)电机。①电机与电机座的连接处应尽可能保持刚性,连接牢固,且不要留有活动间隙。②电机座与机臂的连接处应尽可能保持刚性,连接牢固,且不要留有活动间隙。
③电机的动平衡性能要好,空载旋转时应运行平稳。
(3)螺旋桨。①螺旋桨与电机轴的连接处应尽可能保持刚性,连接牢固,电机轴与桨平面尽可能保持垂直,且不要留有活动间隙。②螺旋桨的平衡性要好,对于两叶桨应能够在螺旋桨平衡器上保持平衡。大尺寸螺旋桨引起的震动比小尺寸螺旋桨要大,因此在大尺寸飞行器中要特别注意机械减震。
审核编辑 :李倩
-
飞机飞行原理2010-02-24 0
-
基于MATLAB的机械震动型号分析2012-04-05 0
-
小波分析求教程和程序,震动信号的时频域特性分析2017-06-01 0
-
全新认识 震动/振动测试2019-07-25 0
-
油液分析技术怎么监测飞机的安全?2019-08-15 0
-
步进电机低频震动的问题2021-06-28 0
-
采用DSP的实时震动信号分析处理系统设计原理2009-09-11 1012
-
探讨震动对系统设计的影响分析2019-08-29 2682
-
分割震动引起的杂音分析2023-04-04 944
-
飞机的飞行原理和结构动态图2023-10-31 1741
-
精密震动马达的特点及应用分析2024-09-19 253
-
震动马达在手表中的应用分析2024-10-09 304
-
游戏手柄震动马达的技术特点分析2024-10-09 264
全部0条评论

快来发表一下你的评论吧 !
