

使用HRPWM的注意事项
电子说
描述
1.高精度PWM的工作原理 (HRPWM)
1.1 高精度PWM的MEP技术
C2000支持占空比、相移、死区和周期的高精度控制。HRPWM是在普通PWM模块上采用微边沿定位 (MEP, micro-edge positioner) 技术实现的。简单来说, 就是将一个计数周期再拆分为很多个小的MEP步长, 如下图所示。 其中,MEP最小步长是150ps。
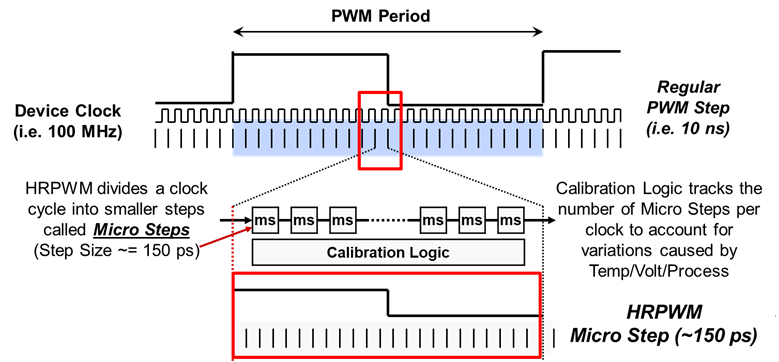
图1 HRPWM的微边沿定位MEP示意图
计算举例:如下图所示(开关频率为1MHz),控制精度是由PWM的“计数器值”和“比较值”的来决定。F280013x的CPU频率为120MHz,假设EPWM模块时钟为120MHz, 此时EPWM单个计数周期为8.3 ns,MEP步长为150 ps。如此, 可将每一个计数周期再细分为8.3 ns / 150 ps = 55. 56份。如图中单边向上计数模式下, 开关频率为1MHz,则三角波载波周期为1 us, 计数周期TBPRD等于120。如果想实现10.15%的占空比,则边沿时间的控制应当是 10.15 * 8.3 ns = 84.245 ns。此时, 设定CMPA = 10 (83 ns),剩下的1.245ns(不足单个计数周期)应当由HRPWM模块来实现, 也就是CMPA上再加上1.245 ns = 1245 ps = 150 ps * 8.3 » 8个MEP步长。
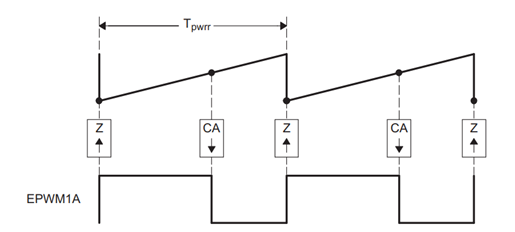
图2 单边计数模式下的载波波形
其中,PWM分辨率的计算公式,如图3所示。
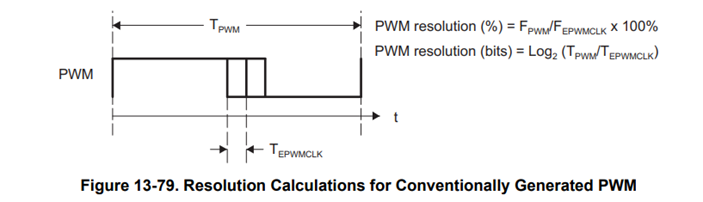
图3 PWM的分辨率计算公式
图4为不同开关频率下的PWM和HRPWM的分辨率。如下图,当开关频率>250k,或者所要求的PWM分辨率>(9-10 bit)时,系统则需要使用HRPWM模块。
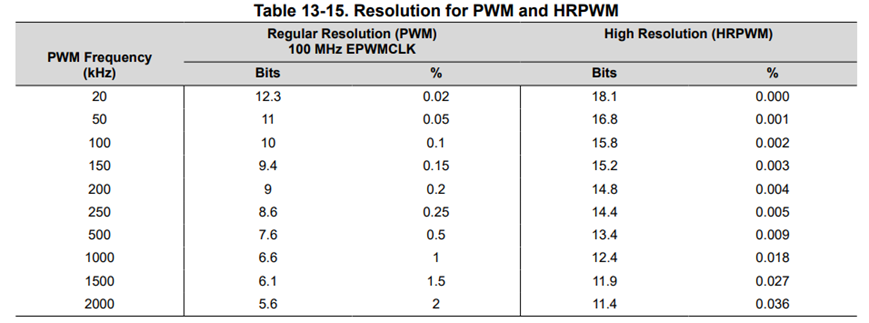
图4 PWM和HRPWM的分辨率算例表
1.2 高精度PWM的相关寄存器
高精度PWM相关的寄存器,如CMPAHR/CMPBHR、TBPHSHR、TBPRDHR、DBREDHR和DBFEDHR,以及HRPWM的时钟输入与配置,如图5和图6所示。HRPWM高精度寄存器作用位置是在AQ子模块之后,由此不会影响AQ执行边沿动作。
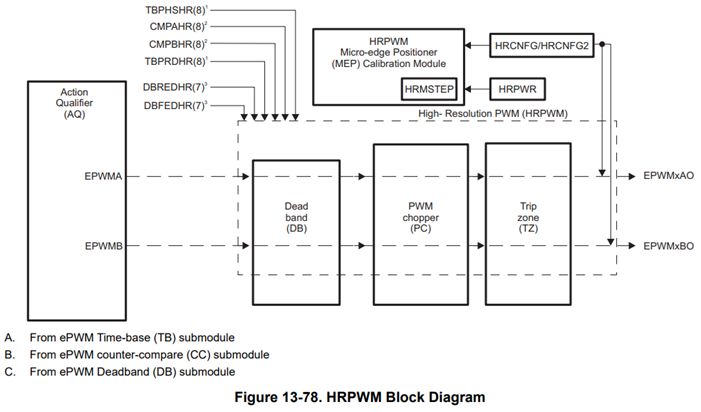
图5 HRPWM的相关的寄存器
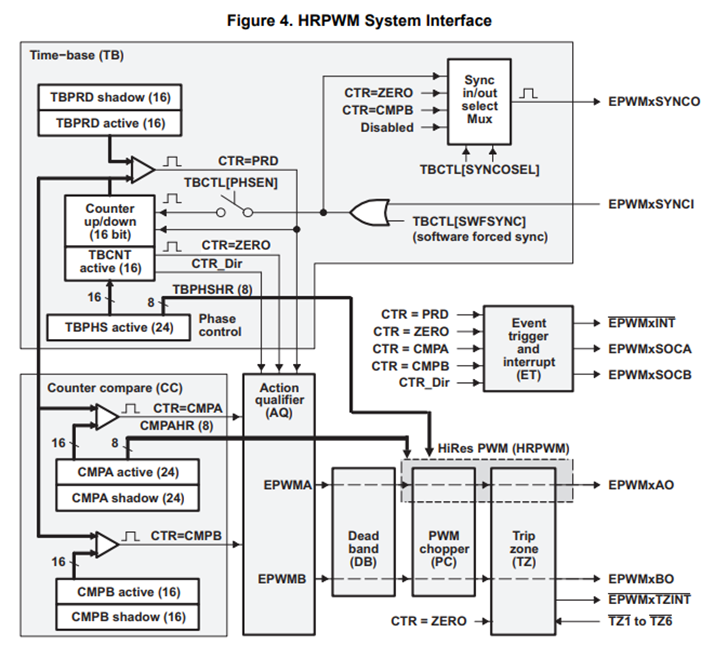
图6 HRPWM的相关的寄存器作用位置
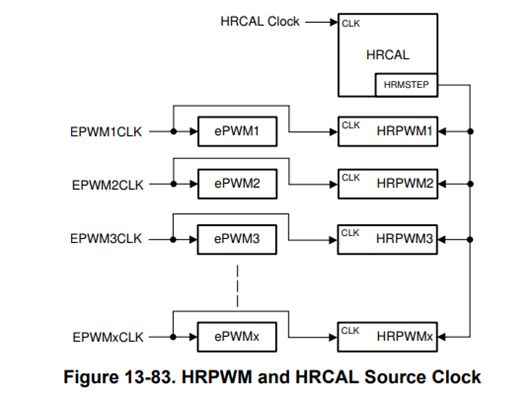
图7 HRPWM的时钟输入与配置
其中,需要注意的是CMPAHR寄存器只会影响Channel A,它跟CMPA没有任何必然关系;CMPBHR寄存器只会影响Channel B,它跟CMPB没有任何必然关系。同时, CMPAHR和CMPBHR分别可以作用在上升沿、下降沿和上升/下降沿。如下图寄存器的说明可知, 如果仅配置CMPAHR寄存器值, 而Channel B上通过死区模块由PWMxA极性翻转而来, Channel B 上则不会产生高精度的PWM波形。若需要Channel A和Channel B都需要高精度模式, 此时需要将CMPAHR 与CMPBHR赋予相同的值,从而产生正确的PWM波形,如图8所示。
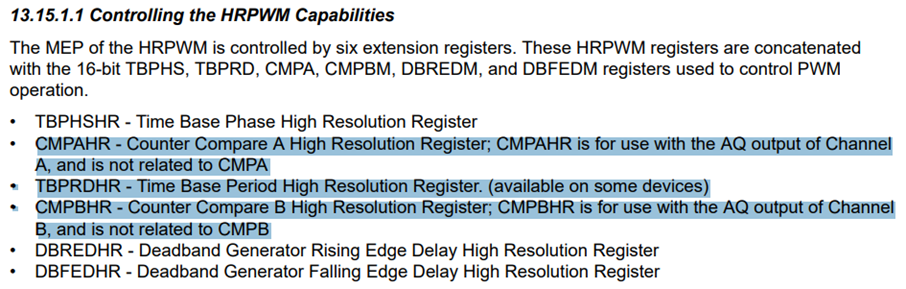
图8 HRPWM的CMPAHR/CMPBHR寄存器说明
1.3 高精度PWM的CMPAHR/CMPBHR寄存器计算
以F28004x/F28003x为例,CMPAHR的算例及计算过程如下图9所示。分别针对不同CMPAHR和CMPBHR上升沿REP (Rising Edge Position) 、下降沿FEP (Falling Edge Position) 和上升/下降沿BEP (Both Edge Position) 的作用示例。
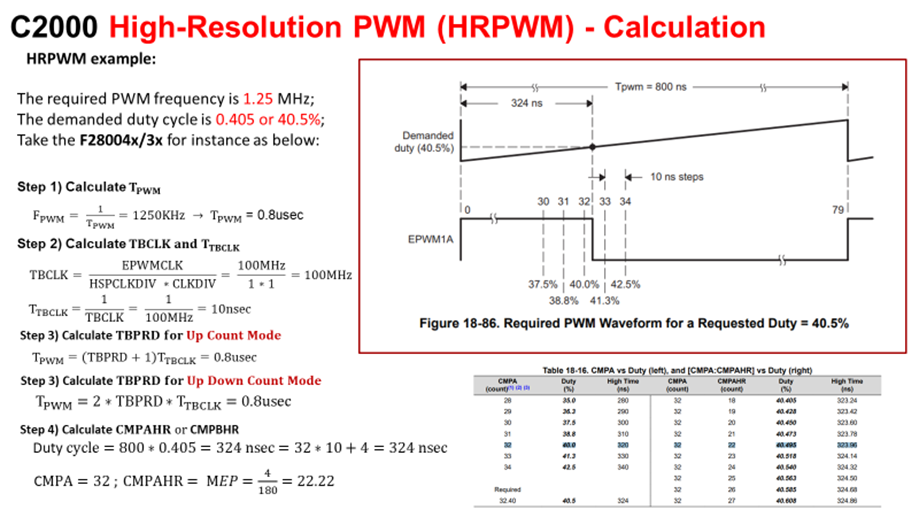
图9 HRPWM的CMPAHR算例
CMPAHR和CMPBHR上升沿REP作用示例, 如图10:
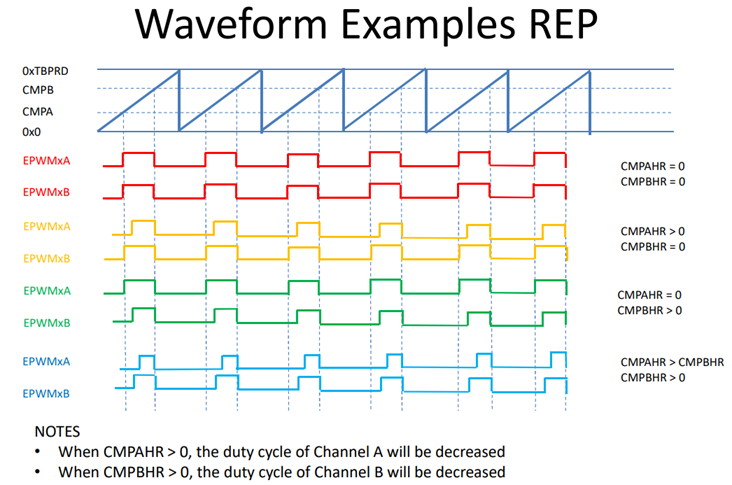
图10
CMPAHR和CMPBHR下降沿FEP作用示例,如图11:
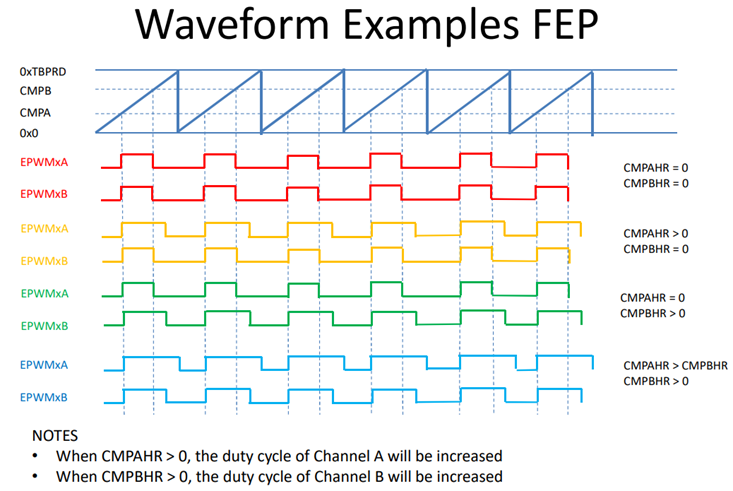
图11
CMPAHR和CMPBHR上升/下降沿BEP作用示例,如图12:
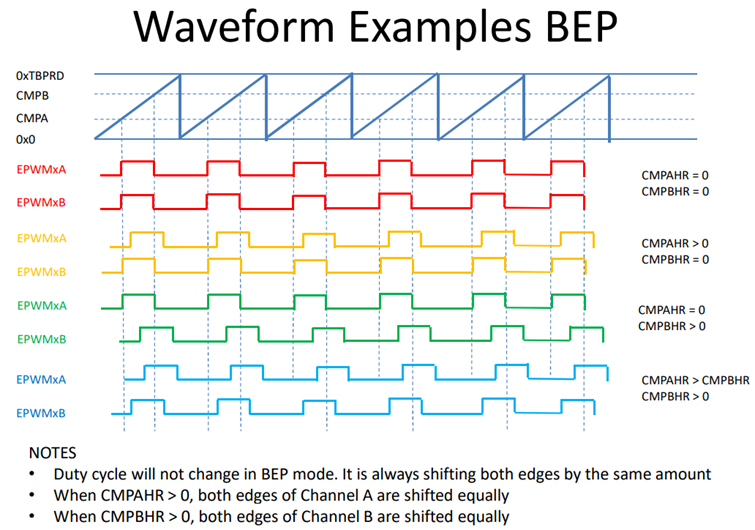
图12
1.4 创建和配置高精度PWM的工程项目
1)创建Driverlib的工程项目
Step1:添加 "Include" Files: #include "sfo_v8.h" 以及所对应的库文件SFO_lib
Step2:声明Variable Declarations:
uint16_t status = SFO_INCOMPLETE;
uint32_t MEP_ScaleFactor = 0; //scale factor value
volatile uint32_t ePWM[(PWM_CH + 1)] = {0, EPWM1_BASE, EPWM2_BASE};
Step3:缩放因子初始化MEP_ScaleFactor Initialization:
while(status == SFO_INCOMPLETE)
{
status = SFO();
if(status == SFO_ERROR)
{
//
// SFO function returns 2 if an error occurs & # of MEP
// steps/coarse step exceeds maximum of 255.
//
error();
}
}
Step4:增加用户代码并配置对应的寄存器如CMPAHR
void main ()
{
int status;
// User code
// ePWM1, 2, 3, 4 are running in HRPWM mode
// The status variable returns 1 once a new MEP_ScaleFactor has been
// calculated by the MEP Calibration Module running SFO
// diagnostics.
status = SFO ();
for(;;)
{
if(test_ctr < 256)
{
HRPWM_setCounterCompareValue(ePWM[1], HRPWM_COUNTER_COMPARE_A, (0x2000 + test_ctr));
test_ctr++;
}
else
{
test_ctr = 0;
}
if(status == SFO_ERROR)
{
//
// SFO function returns 2 if an error occurs & # of
// MEP steps/coarse step exceeds maximum of 255.
//
error();
}
}
}
2)Bit-field按寄存器创建的工程
Step1:添加 "Include" Files: #include "sfo_v8.h"以及所对应的库文件SFO_lib
Step2:声明Variable Declarations:
Uint16 status = SFO_INCOMPLETE;
int MEP_ScaleFactor = 0; //scale factor value
volatile struct EPWM_REGS *ePWM[] = {0, &EPwm1Regs, &EPwm2Regs};
Step3:缩放因子初始化MEP_ScaleFactor Initialization:
同上。
Step4:增加用户代码并配置对应的寄存器如CMPAHR
同上。
1.5 测试工程与PWM波形

2. 高精度PWM的注意事项
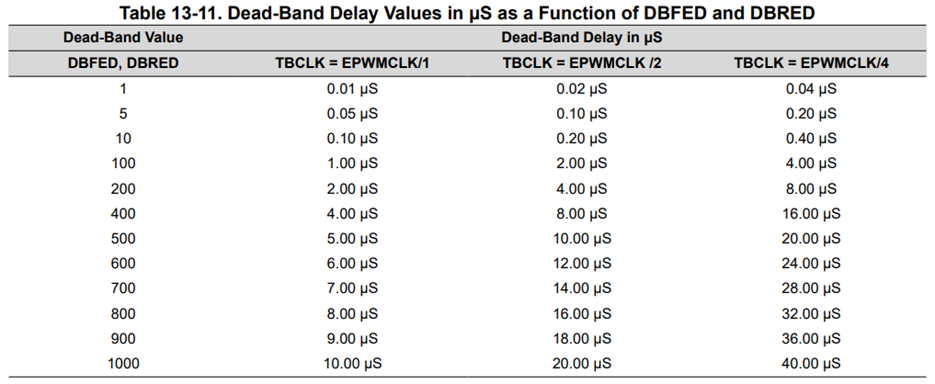
2.1 高精度PWM的Dead Band半个TBCLK计数周期生效
如下Note提示, 死区的高精度模式控制仅在半个TBCLK计数周期生效, 如下计算公式可知, 若CPU主频直接分频给到EPWM时钟,即TBCLK 为100MHz,也就是10ns, 此时DBREDHR和DBFEDHR寄存器仅在5ns计数周期生效, 这也是为了进一步保证高精度死区的生成。



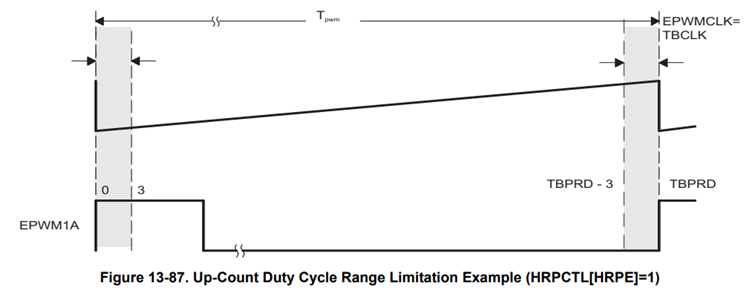
2.2 高精度PWM的Dead Band高精度仅在双边计数Up-Down模式生效
如下Note提示, 死区的高精度模式控制仅在Up-Down计数模式下生效, 这主要是由于HRPWM的Duty占空比高精度模式控制限制所造成的。HRPWM在前三拍和后三拍是无效的,此时若想生成0%占空比可由普通PWM生成。硬件上不允许单边计数模式下实现占空比的高精度模式控制。

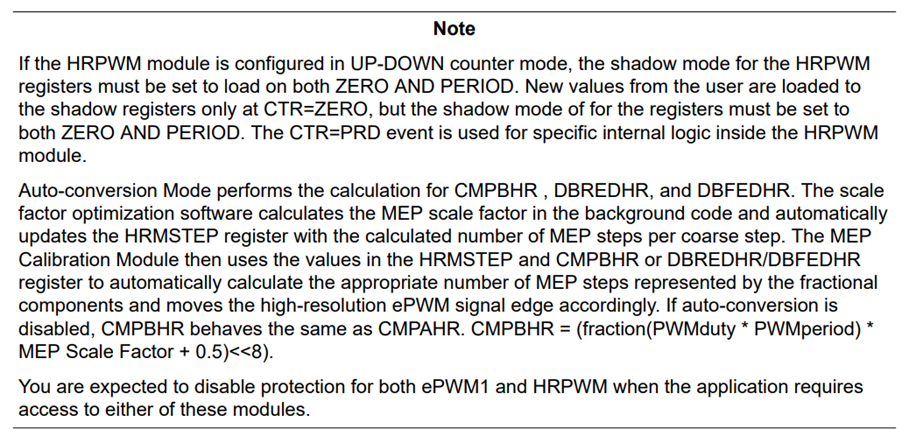
2.3 Up-Down模式下高精度PWM的寄存器加载时刻仅Zero-Period生效
如下Note提示, 双边计数Up-Down模式下高精度控制影子寄存器加载仅在ZERO AND PERIOD生效, HRPWM模块在过周期处用于内部特殊逻辑计算而不进行加载。单边计数Up模式无此限制要求。此外单边Down模式下是不支持高精度HRPWM操作。
3.结论
高精度模式的控制实现与普通PWM配置有差异,总结来说有以下几点:1.CMPAHR负责Channel A上的高精度控制, CMPBHR负责Channel B上的高精度控制;2. HRPWM寄存器的生效时刻需要注意;3. 死区和占空比高精度实现的模式会对计数方式有要求;4. 单独某一个Channel A上实现高精度会造成另外Channel B上的影响,不过仅±1 TBCLK;5. HRPWM高精度模式控制最高分辨率150ps, 可实现占空比Duty、死区DBREDHR和DBFEDHR、相移TBPHSHR和周期值TBPRDHR的高精度模式控制。找元器件现货上唯样商城以上不限于为高精度模式的使用与注意事项。
来源:TI
作者:Ke, Shaoxing
审核编辑:汤梓红
-
使用注意事项2023-03-17 798
-
使用HRPWM的注意事项2023-03-14 3044
-
COB光源的使用注意事项2022-12-13 2785
-
电源MOSFET使用注意事项2021-06-18 1625
-
Protel布线设计注意事项2017-01-12 1155
-
pcb注意事项2016-07-29 1229
-
电路设计注意事项2016-06-17 1290
-
焊锡技巧及注意事项培训2016-05-13 1565
-
钽电解应用注意事项2010-03-31 774
-
电容的用途及注意事项2010-01-14 2378
-
硒鼓注意事项2009-12-28 1380
-
胆机使用的注意事项2009-11-29 2528
-
电池组的设计加工注意事项2009-11-05 1900
-
LCM使用注意事项2006-04-16 1700
全部0条评论

快来发表一下你的评论吧 !
