

手把手教你S7-1200中实现PID控制
工业控制
描述
【导读】分享S7-1200中如何实现PID控制。
概述
【一】PID控制
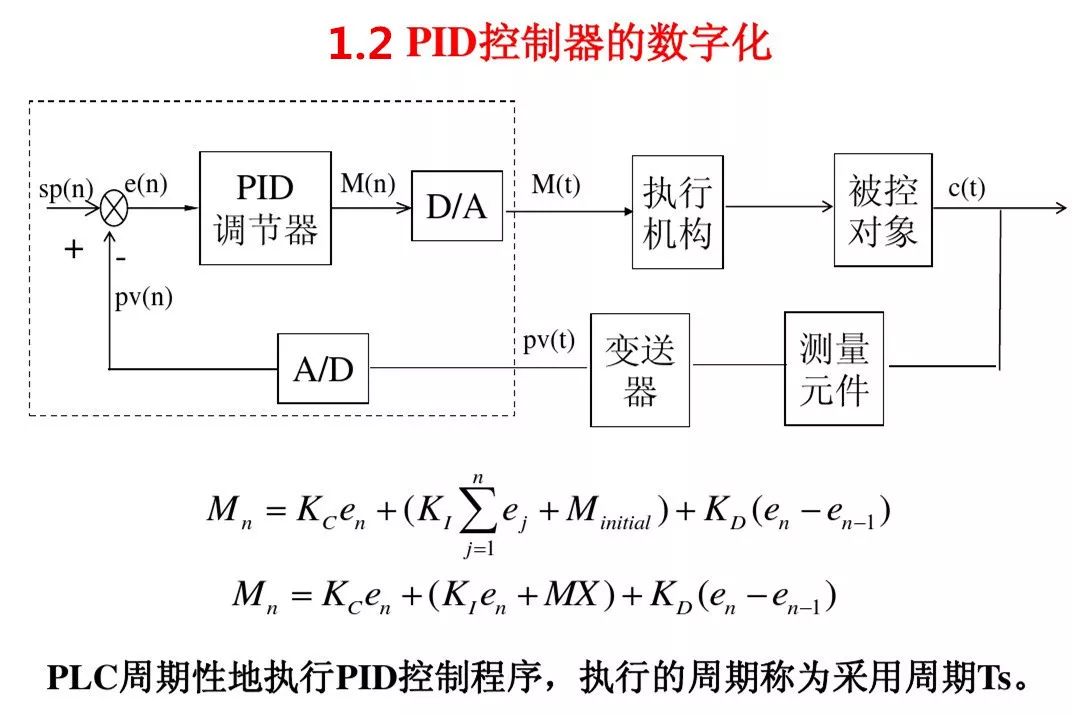
PID功能用于对闭环过程进行控制。PID控制适用于温度、压力和流量等物理量,是工业现场中应用最为广泛的一种控制方式,其原理是对被控对象设定一个给定值然后将实际值测量出来,并与给定值比较,将其差值送入PID控制器,PID控制器按照一定的运算规律,计算出结果,即为输出值,送到执行器进行调节,其中的P、I和D指的是比例、积分和微分,是一种闭环控制算法。通过这些参数,可以使被控对象追随给定值变化并使系统达到稳定,自动消除各种干扰对控制过程的影响。
【一】S7-1200的PID控制
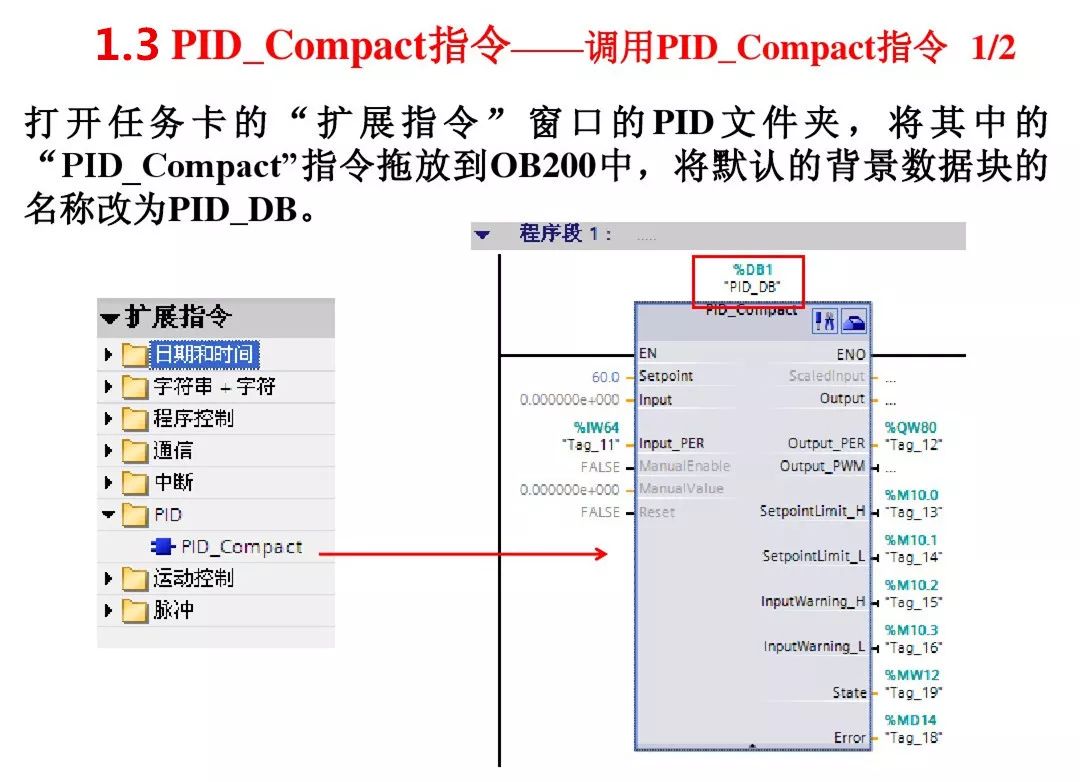
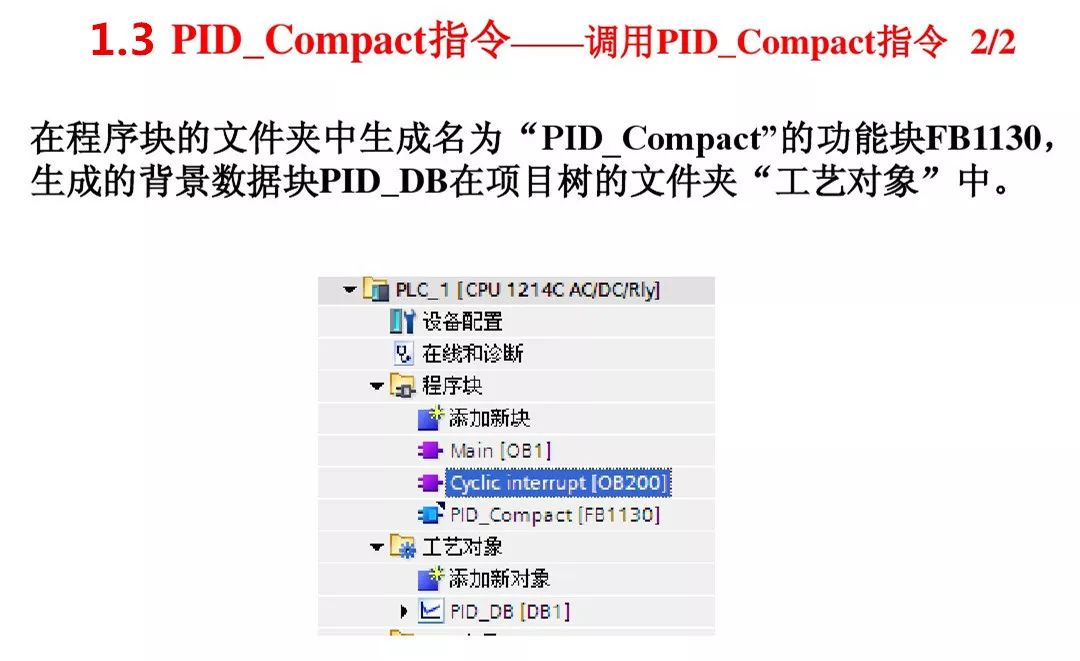
S7-1200 CPU提供了PID控制器回路数量受到CPU的工作内存及支持DB块数量限制。严格上说并没有限制具体数量,但实际应用推荐客户不要超过16路PID回路。可同时进行回路控制,用户可手动调试参数,也可使用自整定功能,提供了两种自整定方式由PID控制器自动调试参数。另外STEP7 Basic还提供了调试面板,用户可以直观的了解控制器及被控对象的状态。PID控制器功能主要依靠三部分实现,循环中断块,PID指令块,工艺对象背景数据块。用户在调用PID指令块时需要定义其背景数据块,而此背景数据块需要在工艺对象中添加,称为工艺对象背景数据块。PID指令块与其相对应的的工艺对象背景数据块组合使用,形成完整的PID控制器。自软件 博途V13 起,固件为 4.0 或更高版本的 S7-1200,可以使用 PID_Compact V2.2 指令。S7-1200 在 V4.0 以上,博途 V13 SP1 以上,使用 S7-PLCSIM V13 SP1 可以仿真 PLC 程序,但不支持工艺功能(高速计数器、运动控制、PID 调节)的仿真。
(1)下表显示了 PID_Compact 的每个版本可用于哪种 CPU:
| CPU | FW | PID_Compact |
| S7-1200 | ≥ V4.x |
V2.2 V1.2 |
| S7-1200 | ≥ V3.x |
V1.2 V1.1 |
| S7-1200 | ≥ V2.x |
V1.2 V1.1 |
| S7-1200 | ≥ V1.x | V1.0 |
(2)PID_Compact V2.0 工艺对象典型 CPU 处理时间(取决于 CPU 类型):
| CPU | 典型 CPU 处理时间 (PID_Compact V2.x) |
| CPU 1211C ≥ V4.0 | 300 µs |
| CPU 1215C ≥ V4.0 | 300 µs |
| CPU 1217C ≥ V4.0 | 300 µs |
(3)PID_Compact V2.0 工艺对象背景数据块的存储器要求:
| 分类 | PID_Compact V2.x 背景数据块的存储器要求 |
| 装载存储器要求 | 约 12000 个字节 |
| 总工作存储器要求 | 788 个字节 |
| 保持性工作存储器要求 | 44 个字节 |
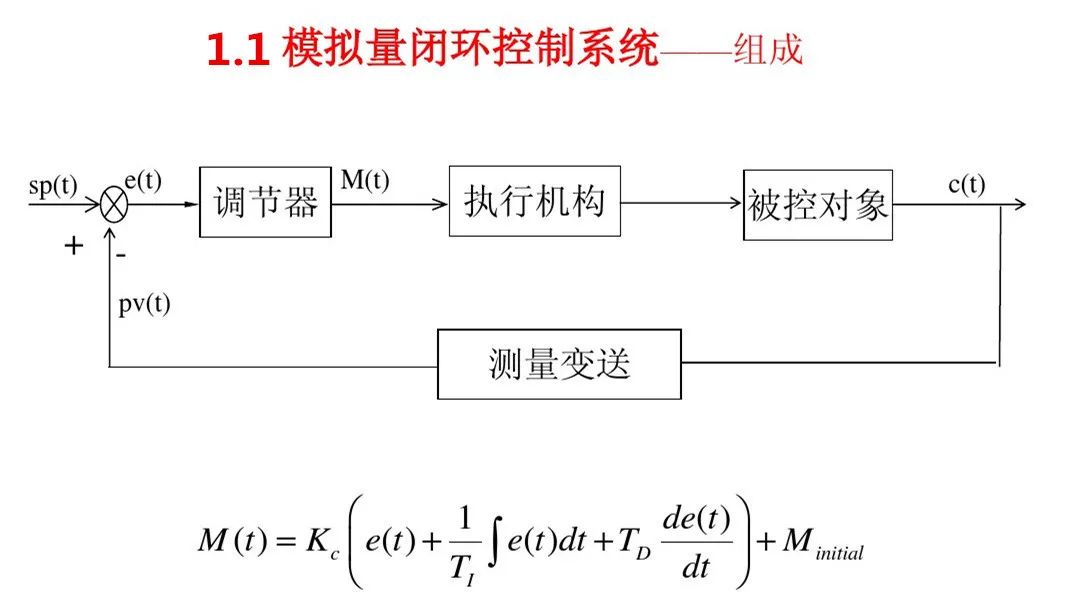
模拟量闭环控制系统-PID控制的特点:
不需要被控对象的数学模型,结构简单容易实现,使用方便有较强的灵活性和适应性。


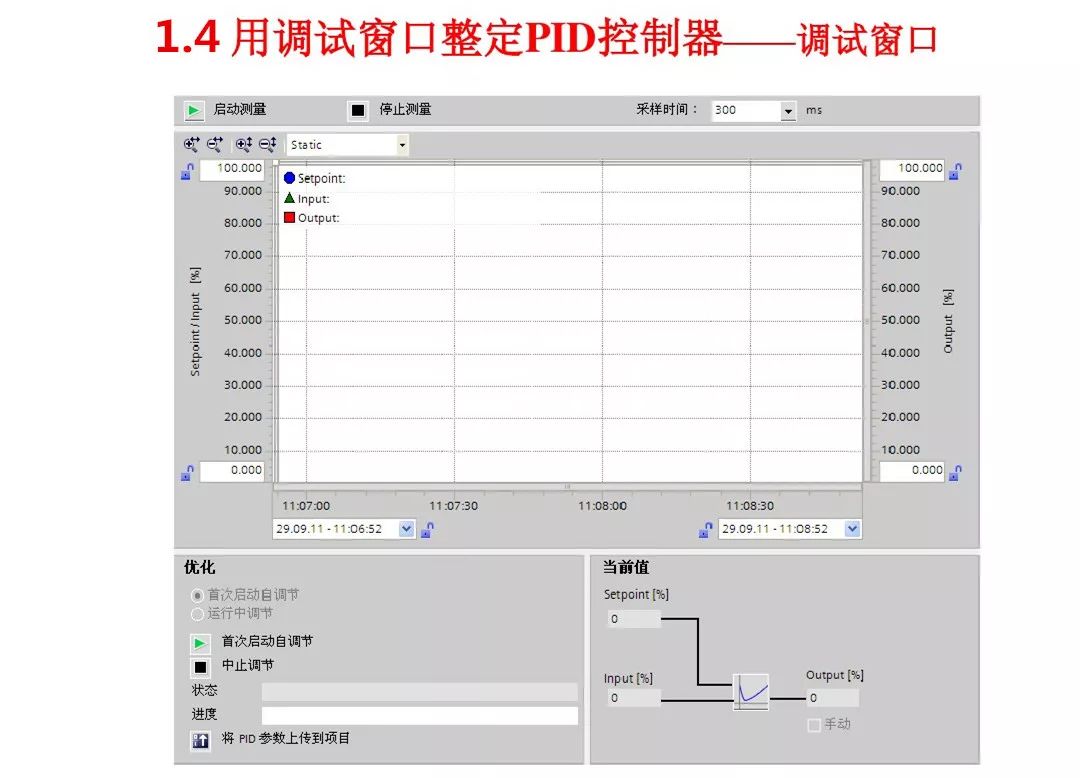
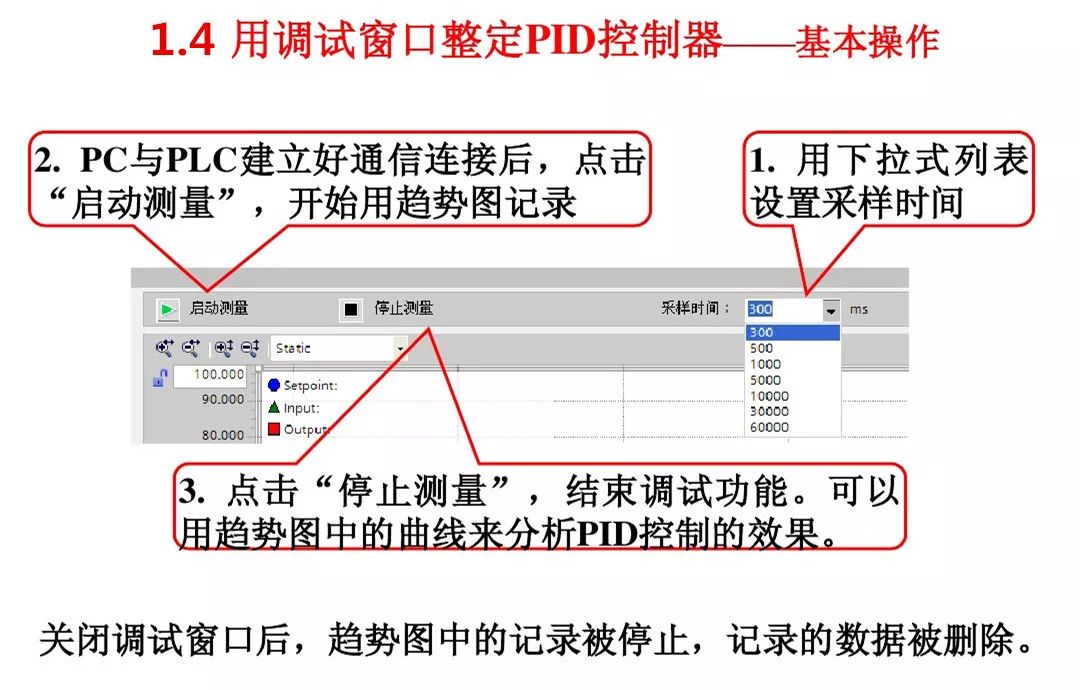
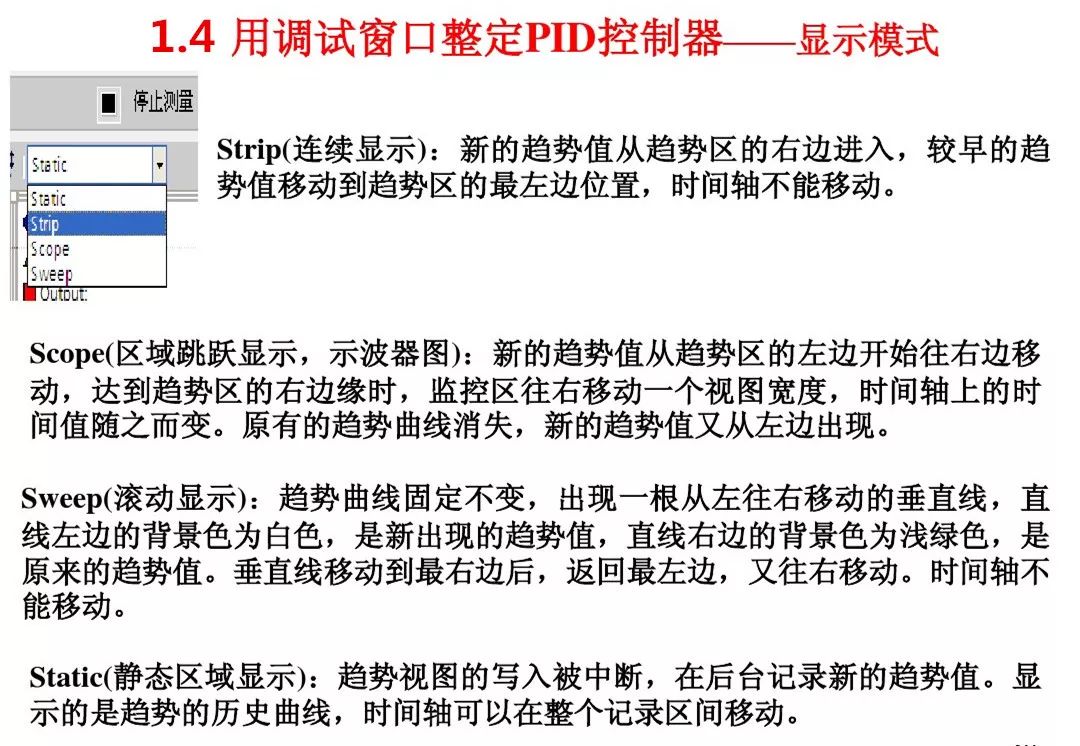
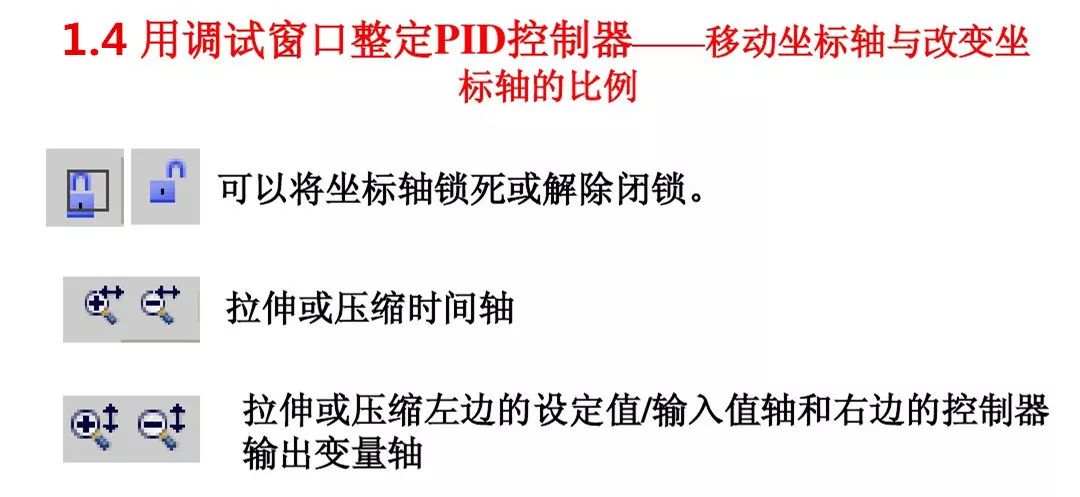
用调试窗口整定PID控制器-调试窗口的功能
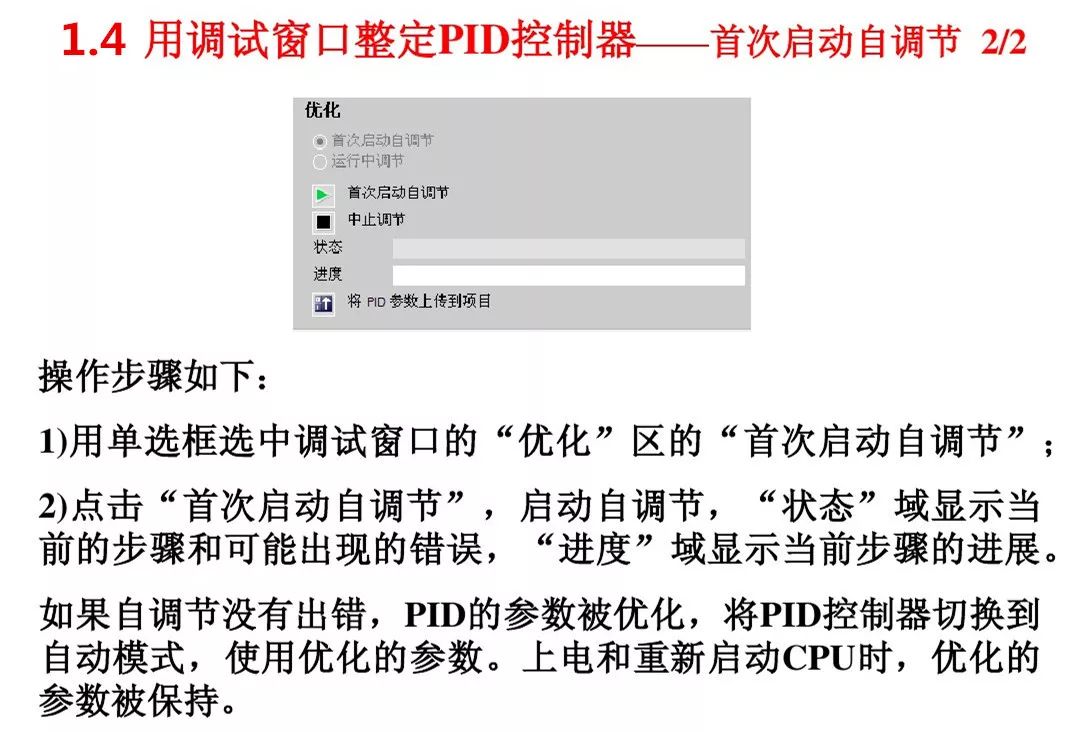
1、使用“首次启动自调节”功能优化控制器
2、使用“运行中自调节”功能优化控制器,可以实现最佳调节
3、用于趋势视图监视当前的闭环控制
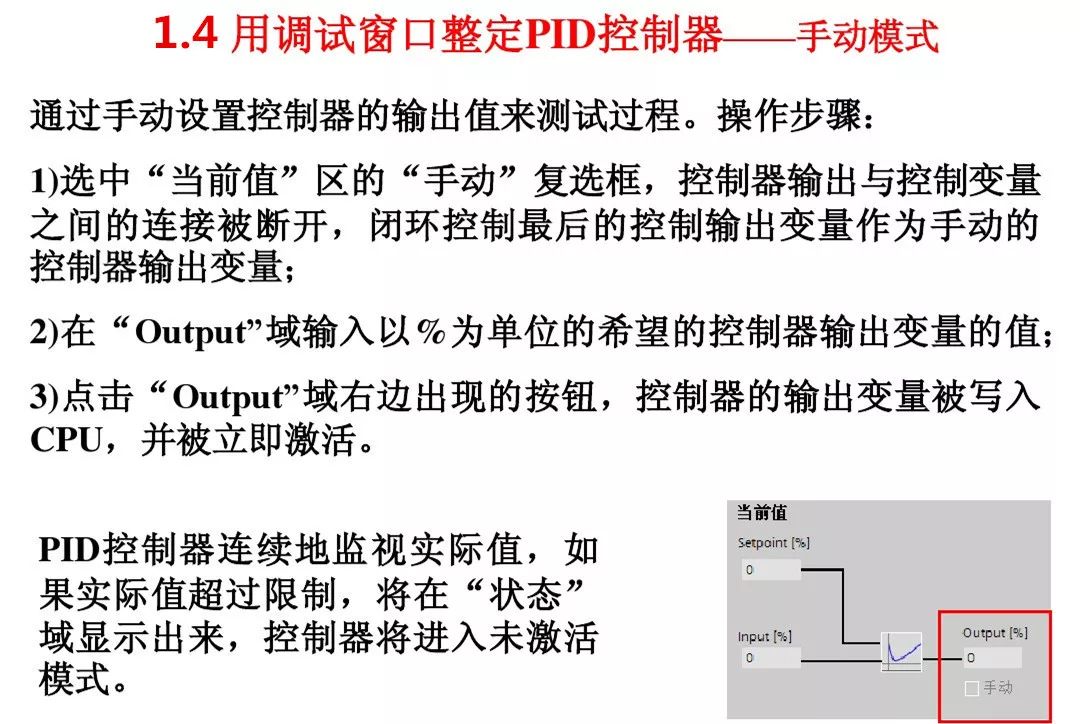
4、通过手动设置控制器的输出值来测试过程
审核编辑:汤梓红
-
手把手教你学FPGA仿真2023-10-19 1183
-
手把手教你开发基于单片机的wifi通信的物联网项目(远程灯控制)2021-11-12 1518
-
手把手教你开关电源PCB排板2021-09-18 2124
-
手把手教你学LabVIEW视觉设计2019-03-06 3653
-
手把手教你如何开始DSP编程2018-04-09 1529
-
手把手教你做电子时钟---前言2017-11-14 1308
-
手把手教你在家搭建监控系统2017-01-17 1200
-
手把手教你安装Quartus II2016-09-18 1854
-
手把手教你学电子书制作2016-09-13 2317
-
手把手教你LabVIEW仪器控制2015-12-11 9186
-
【汇总篇】小草手把手教你 LabVIEW 串口仪器控制2015-02-04 258814
-
美女手把手教你如何装机(中)2010-01-27 1698
-
手把手教你写批处理-批处理的介绍2009-10-25 1470
-
手把手教你构建一个完整的工程2009-08-03 567
全部0条评论

快来发表一下你的评论吧 !
