

齿轮的种类、作用、传动原理
工业控制
描述
一,齿轮的种类与作用
1.0.齿轮的种类
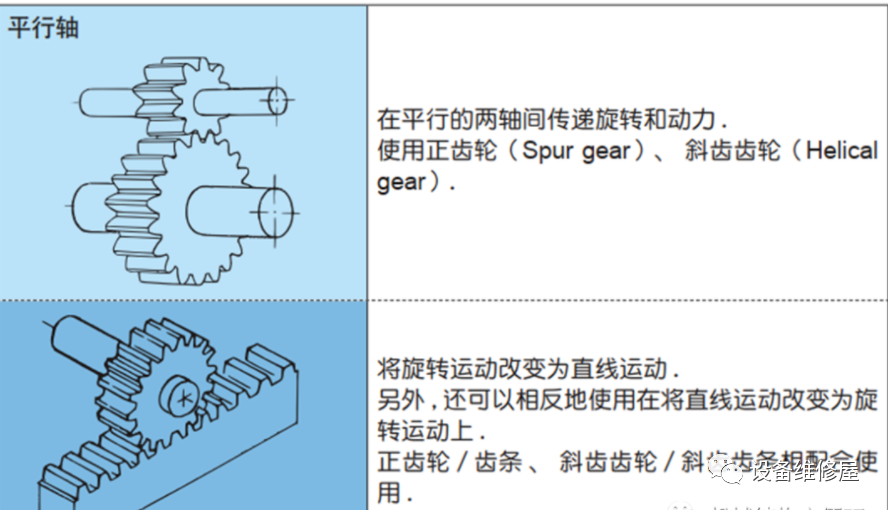
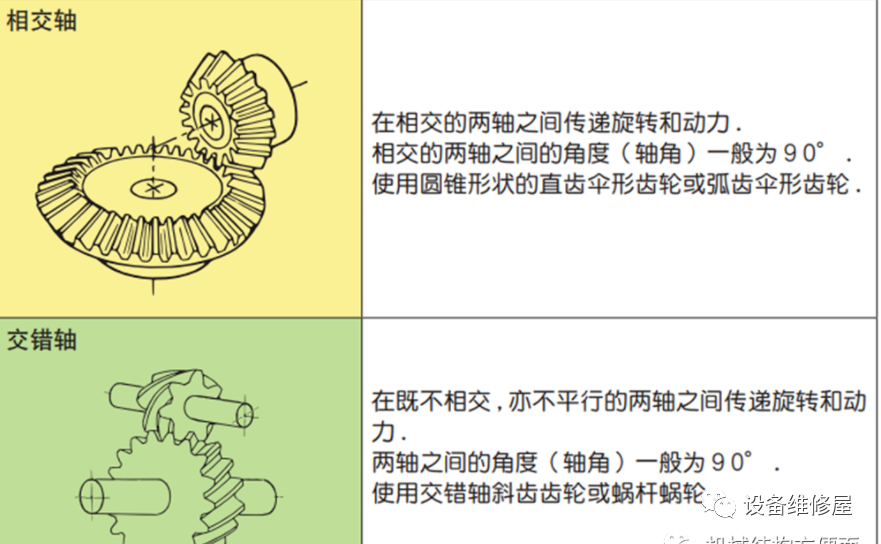
齿轮的种类繁多 , 其分类方法最通常的是根据齿轮轴性。一般分为平行轴、相交轴及交错轴三种类型。平行轴齿轮包括正齿轮、斜齿轮、内齿轮、齿条及斜齿条等。相交轴齿轮有直齿锥齿轮、弧齿锥齿轮、零度齿锥齿轮等。交错轴齿轮有交错轴斜齿齿轮、蜗杆蜗轮、准双曲面齿轮等.
(齿轮的分类和种类)
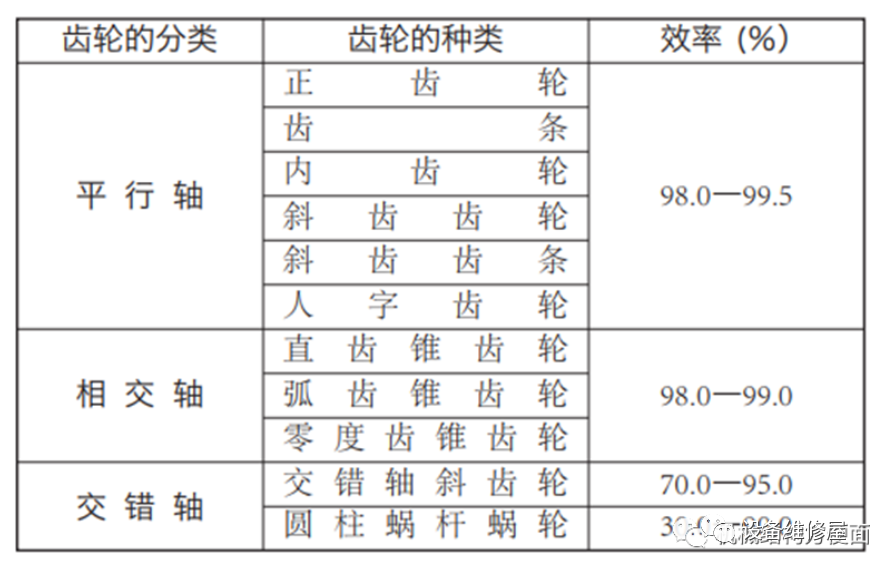
此表中所列出的效率为传动效率 , 不包括轴承及搅拌润滑等的损失。 平行轴及相交轴的齿轮副的啮合 , 基本上是滚动 ,
相对的滑动非常微小 , 所以效率高。 交错轴斜齿轮及蜗杆蜗轮等交错轴齿轮副 , 因为是通过相对滑动产生旋转以达到动力传动 ,
所以摩擦的影响非常大 , 与其他齿轮相比传动效率下降。 齿轮的效率是齿轮在正常装配状况下的传动效率。如果出现安装不正
确的情况 , 特别是锥齿轮装配距离不正确而导致圆锥交点有误差时 , 其效率会显著下降。
2.0 齿轮的作用
齿轮是必须成对使用才能起到作用
2.1 传递机械运动的动力:在许多的汽车上面都有很多的齿轮,这些齿轮可以帮助汽车或者其它各种机械的运转,比如像汽车上面的换挡装置,以及工业减速箱等,有了齿轮的作用,它们才能够正常地运转;
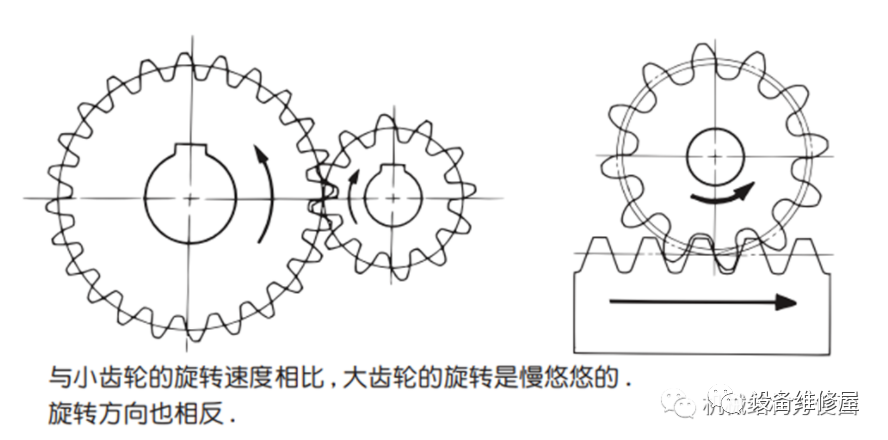
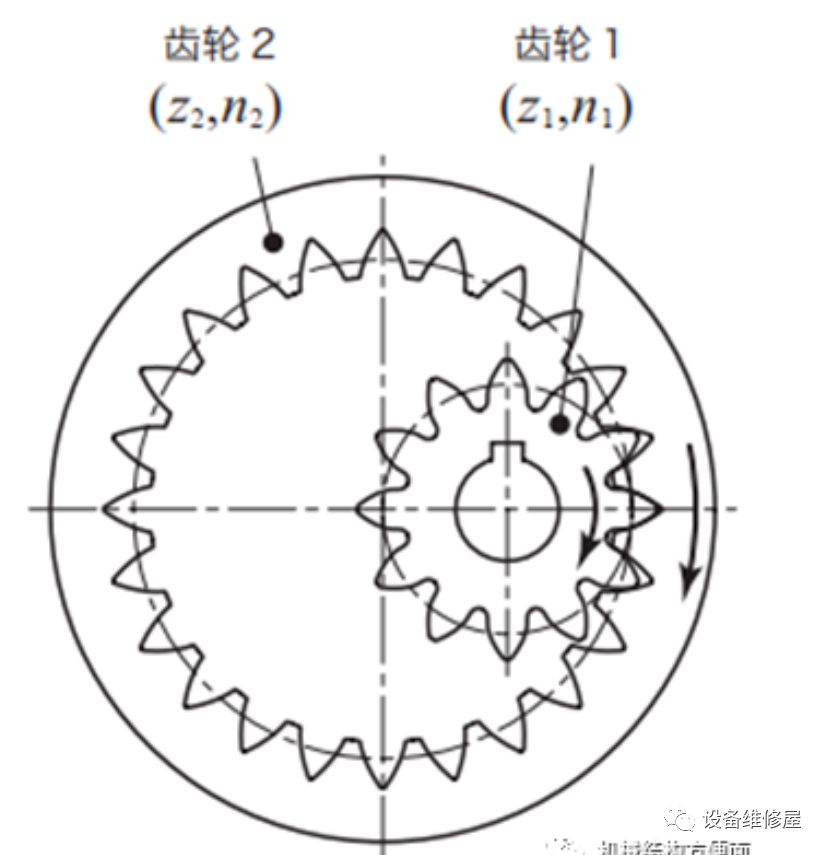
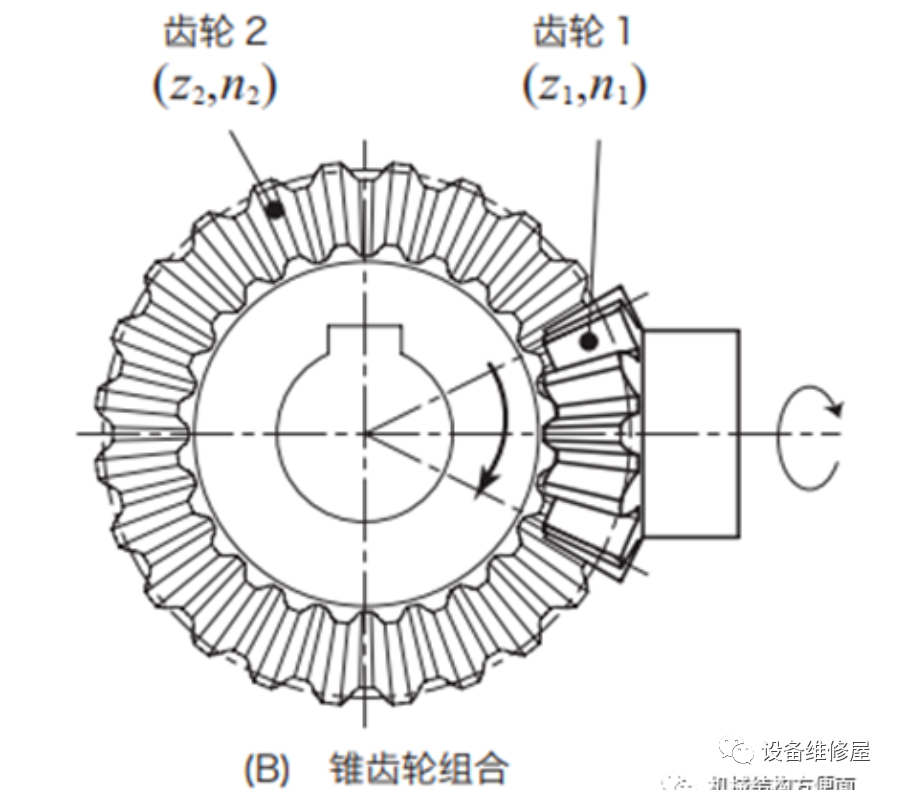
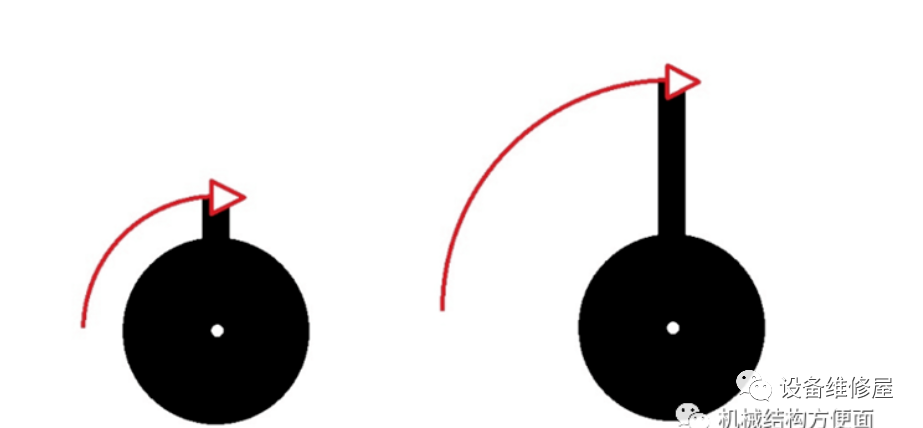
2.2 改变运动的方向:
下图为不同齿轮配合的改变运动方向的规律
2.3 改变运动的速度:在机器上面安装大小齿轮的配合,可以让机器很快的进行加速或减速,比如减速箱,还有加速装置。
2.4 改变力矩或矩扭:大小齿轮的配合,会改变齿轮输出的力矩; (下面第三点有详解)
二:齿轮系的传动比和旋转方向
传动比是机构中两转动构件角速度的比值,也称速比。构件a和构件b的传动比为i=ωa/ ωb=na/nb,式中ωa和 ωb分别为构件a和b的角速度(弧度/秒);na和nb分别为构件a和b的转速(转/分)。
1.单级齿轮机构:一对齿轮啮合后而形成的齿轮系称为单级齿轮机构
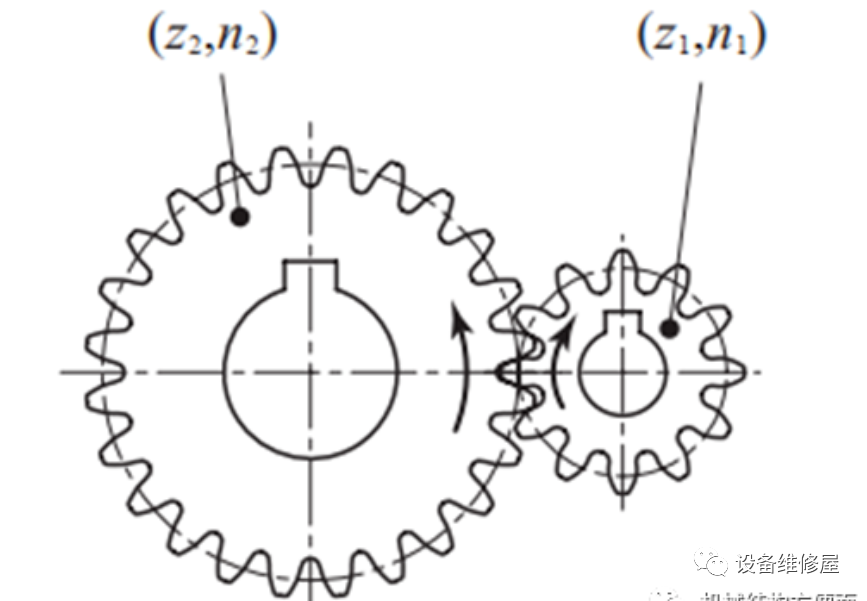
设单级齿轮机构驱动齿轮的齿数为 z1 , 转数为 n1 , 被动齿轮的齿数为 z2 , 转数为 n2 , 传动比的计算方程式如下 :
传动比= z2/z1 = n1/n2
根据传动比的数值 , 可将单级齿轮机构分为三类 :
传动比 < 1 增速齿轮机构 n1 < n2 传动比 = 1 等速齿轮机构 n1 = n2 传动比 > 1 减速齿轮机构 n1 > n2
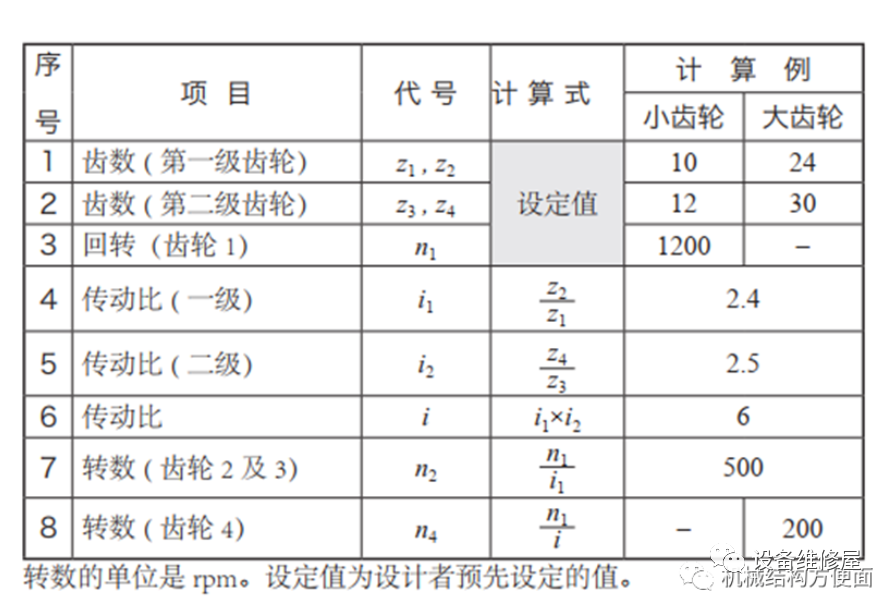
2.0二级齿轮机构:二级齿轮机构是使用了二组单级齿轮机构所构成的。
下图 示意了二级齿轮机构的构造
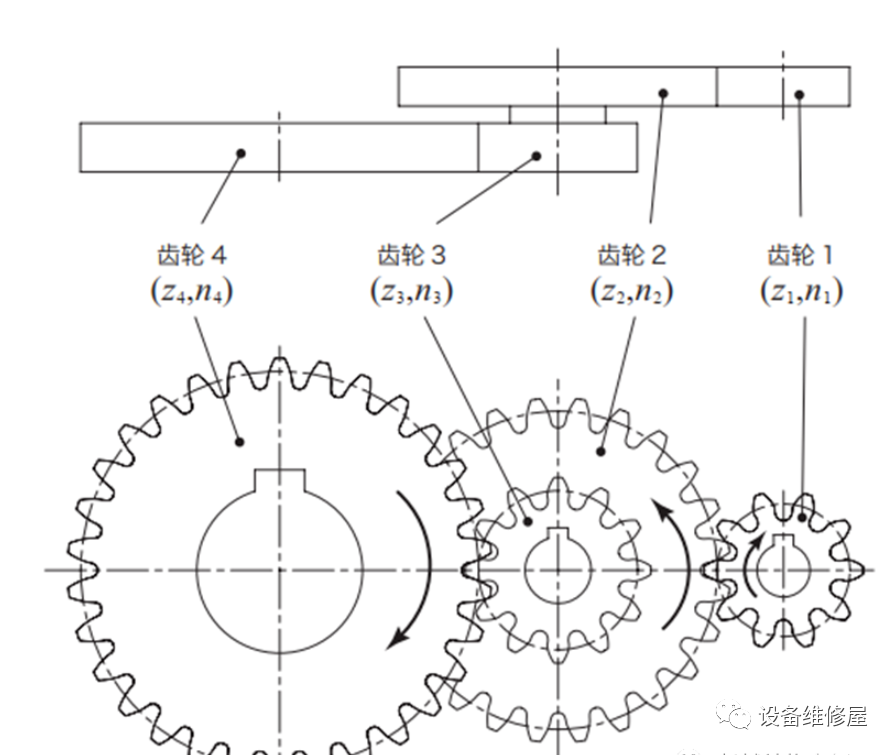
传动比=z2/z1 * z4/z3 = n1/n2 * n3/n4
二段齿轮机构的传动比 计算举列如下
三:扭矩 功率 转速关系
先来看一些公式,一步步理解
a, 物理中力矩,力矩=力×力臂(直线),力矩计算公式M=LxF,力矩单位是牛顿*米,简称是牛*米,符号是N*m
力臂OA×力Fa=力臂OB×力Fb
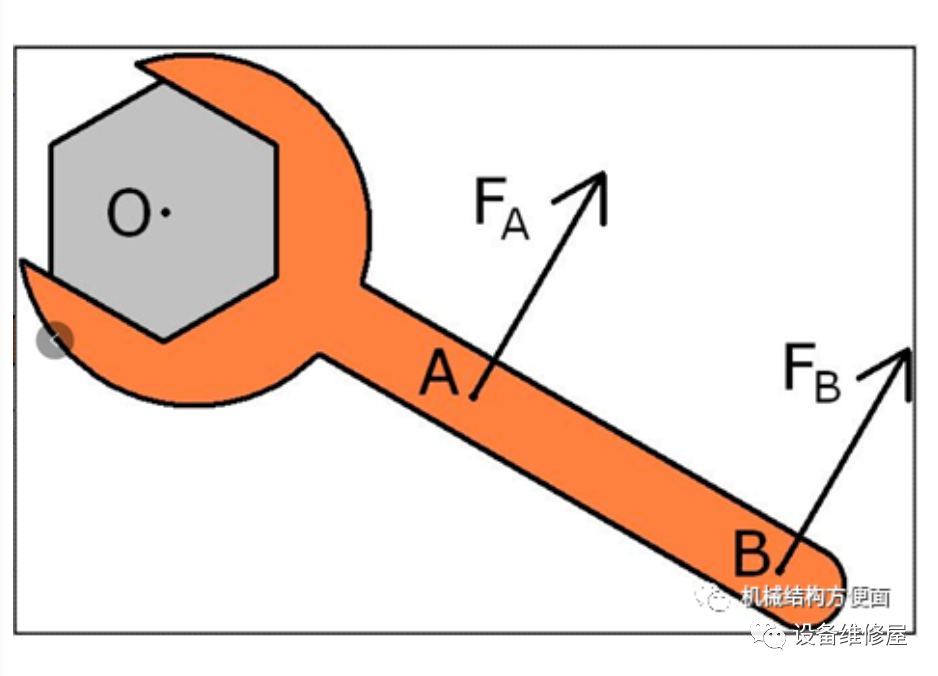
b, 而在旋转状态下, 扭矩(特殊的力矩)=F(力)×(旋转半径),就是切向力与力到作用点的圆的半径的乘积, 扭矩计算公式: M=F*r
c,扭矩与转速的关系:T = 9550P / n ,P = T * n / 9550 ; P 功率,千瓦,kw; T 扭矩,牛米,Nm; n 转速,每分钟转数,r / min. 9550是常数
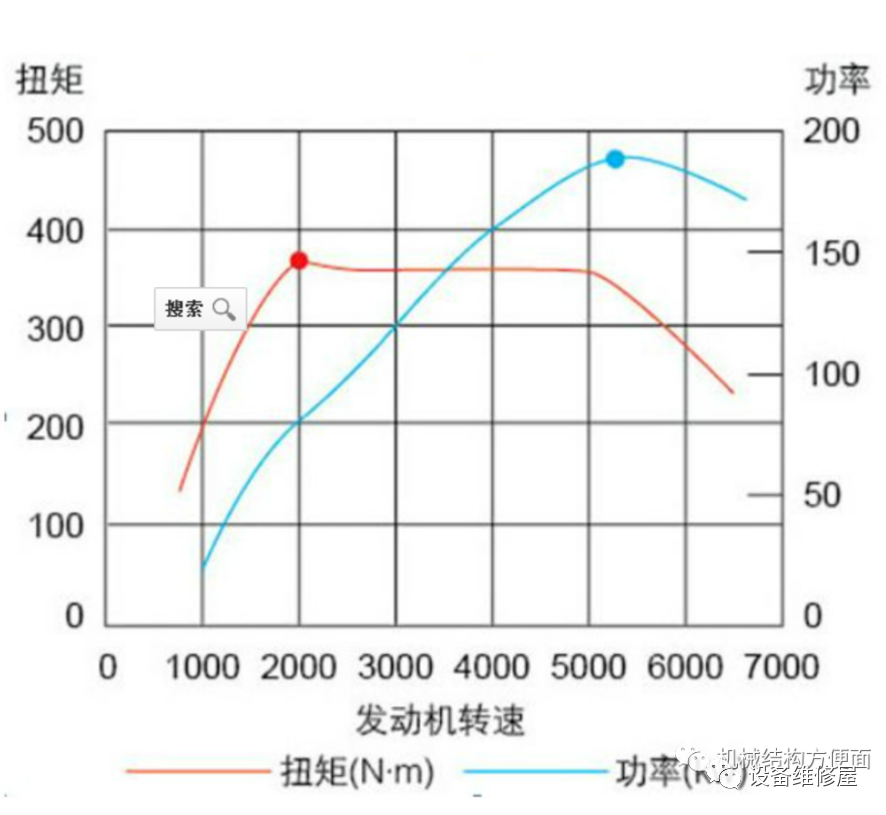
d,功率和扭矩、转速的关系:功率(kw)P=扭矩(N·m)T×转速(RPM)n/9550, 即P=T*n/9550, 可以用下图来理解

齿轮转动图可以看出,功率并没有变(不计传动损耗),而转速被降低了。根据功率=扭矩×转速(*常数),轮端的转速被降了多少倍,轮端的扭矩就会提升多少倍——这就是所谓的“轮上扭矩”。
e,功率和扭矩、角速度的关系:功率P=扭矩T×角速度ω
因为功率P = 功W÷ 时间t,功W = 力F × 距离s,所以P = F×s/t = F×线速度v。这里的v是线速度,而在引擎里,曲轴的线速度v = 曲轴的角速度ω×曲轴半径r;
代入上式得:功率P=力F×半径r×角速度ω;而力F × 半径r=扭矩,故得出:功率P=扭矩×角速度ω。所以引擎的功率能从扭矩和转速中算出来。
图片举例
补充各关系式: 以下为匀速圆周运动
1.线速度V=s/t=2πR/T。
2.角速度ω=Φ/t=2π/T=2πf。
3.角速度与线速度的关系:线速度=角速度×半径,V=ωR。
4.角速度与转速的关系ω=2πn (此处频率与转速意义相同)。
5.周期与频率T=1/f。
主要物理量及单位:弧长(S):米(m)角度(Φ):弧度(rad)频率(f):赫(Hz)周期(T):秒(s)转速(n):r/s半径(R):米(m)线速度(V):m/s角速度(ω):rad/s。
编辑:黄飞
-
旋转花键与齿轮传动哪个更具优势?2025-06-03 882
-
消除齿轮传动间隙的措施有哪些2024-06-14 5126
-
不同的齿轮传动方式的原理解析2023-04-24 7378
-
带齿轮传动的机车-轨道空间耦合动力学模型2021-08-27 1953
-
齿轮减速机的种类有哪些?2021-07-18 5754
-
什么是齿轮传动2018-10-29 24015
-
齿轮传动噪声形成的主要因素及对策2018-10-15 2217
-
斜齿轮传动是怎么转动的,斜齿轮传动的原理2016-10-26 21670
-
行星齿轮传动与其他的传动形式比较2015-08-18 5423
-
齿轮传动介绍2009-04-07 1005
-
齿轮传动ppt2008-10-07 2232
全部0条评论

快来发表一下你的评论吧 !
