

中科院:柔性外骨骼机器人研究取得新进展
描述
近日,中国科学院沈阳自动化研究所(以下简称沈阳自动化所)科研人员面向手部康复,设计了一种具有灵巧操作能力的柔性手部外骨骼机器人;面向下肢助力,提出了一种新的非时间域助力控制方法。相关研究成果发表于《美国电气与电子工程师协会机器人汇刊》(IEEE Transactions on Robotics,简称T-RO)。
据了解,柔性外骨骼机器人作为新兴的智能运动辅助设备,可穿戴在人的身体上,辅助人体运动,为失能或半失能人群提供一种智能化的康复训练新模式。与传统的刚性外骨骼机器人相比,柔性外骨骼机器人具有本体轻质、穿戴舒适、穿脱方便等优势。
然而,柔性外骨骼机器人与人同体的紧密作业方式,以及柔性材质低带宽的原生缺陷,使其对机器人集成技术、人机交互控制方法提出了挑战。
手部康复是卒中患者康复亟需的也是最难的阶段。目前的柔性手部外骨骼机器人只能实现简单的抓握辅助,通常无法恢复人体手部运动的灵巧性。
为此,沈阳自动化所科研人员设计了一种具有完全拇指运动功能的柔性手部外骨骼机器人,可提升脑卒中患者手部的灵活性。
科研人员在对人体骨骼肌肉驱动机理分析的基础上,优化混合驱动配置,以最少的驱动器数量实现人手拇指三维运动,辅助中风患者完成拇指环、抓、捏、松、写等各种训练任务,改善了运动姿态,极大提升了指尖力水平,为患者实现正常生活提供了可能。
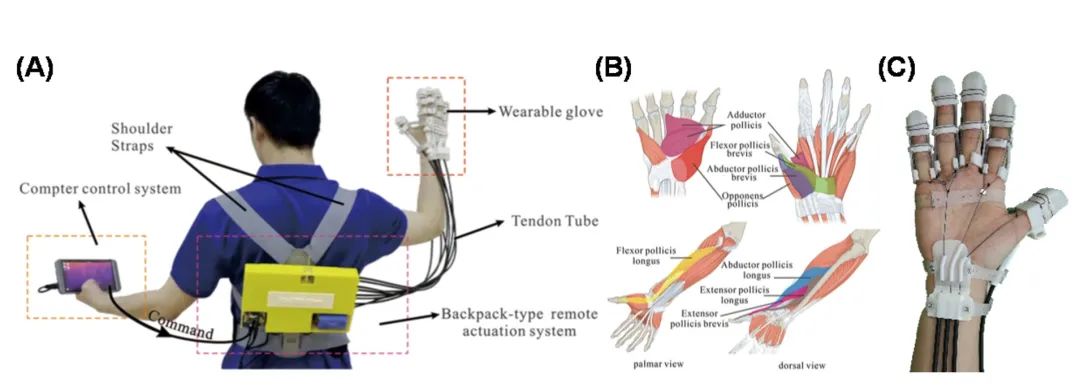
A:上肢柔性外骨骼机器人系统 B:人体骨骼肌肉驱动机理 C:软体手部外骨骼机器人(沈阳自动化所 供图)
站立行走功能是人生活自理功能的必要条件。针对目前柔性下肢外骨骼机器人无法适应不同人体步态、步速、步频等问题,沈阳自动化所科研人员提出了一种可持续融合小腿摆角与足压信息的状态域助力控制方法。
该方法利用高斯模型在线拟合人体站立相的小腿摆角与足压数据,生成与穿戴者运动状态连续对应的助力曲线,保证机器人对急停、急变速等人体运动任务的高适应性与顺应性。实验表明,该方法缩短了穿戴者对外骨骼机器人的适应时间,降低了人体能量消耗,实现了穿戴者对机器人助力模式的自主、连续、随意控制。
IEEE Transactions on Robotics(T-RO)审稿专家认为,该方法是一种“可根本性解决目前外骨骼机器人控制系统时域依赖性问题的技术途径”。
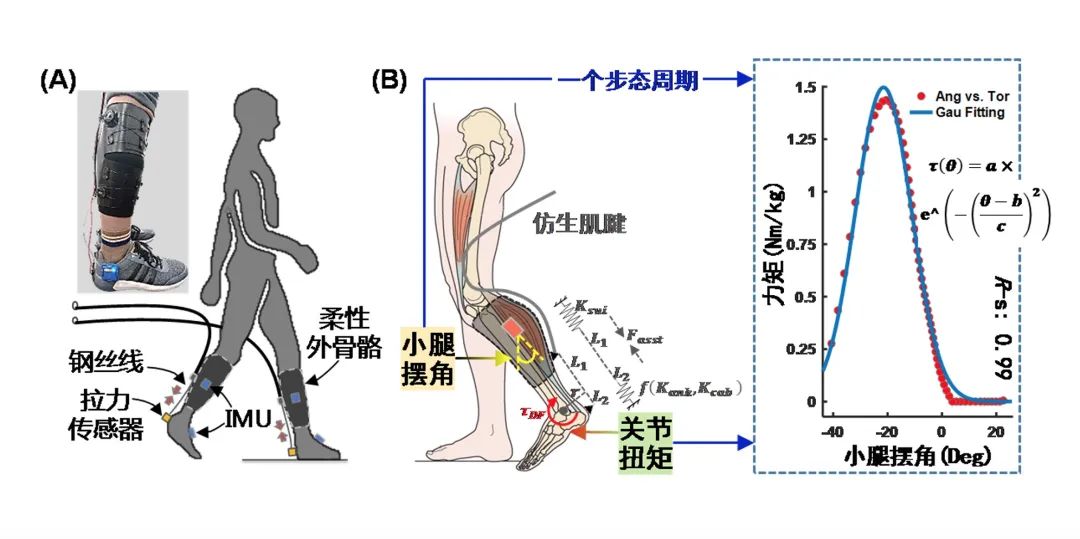
A:下肢柔性外骨骼机器人系统 B:人体运动摆角与关节力矩间的高斯变化规律(沈阳自动化所 供图)
《中国科学报》从沈阳自动化所获悉,这支科研团队在外骨骼机器人、脑肌电信号解码与智能人机交互等研究领域深耕多年,已研制出面向老年人、患者人群的多类康复机器人系统平台。
审核编辑 :李倩
-
探索外骨骼机器人的创新之旅2023-09-20 1487
-
「黑科技」探索外骨骼机器人的创新之旅2023-09-12 1372
-
外骨骼机器人的发展历程与未来发展2023-08-30 2865
-
中科院微电子所:在纳米森林柔性湿度传感器及其应用研究方面取得新进展2023-06-30 1815
-
研究人员开发出3D打印柔性外骨骼机器人2021-03-19 1504
-
柔性人工视觉感知和存储系统获新进展2020-12-26 1156
-
外骨骼机器人的潜力如何2020-01-13 2677
-
下肢外骨骼机器人的控制策略研究进展详细说明2019-09-23 2397
-
浅析外骨骼机器人技术2019-04-28 2567
-
工业机器人市场的最新进展浅析2018-12-14 1475
-
国内首个柔性骨骼机器人亮相高交会 引来众多科技粉围观2018-11-15 1156
-
我国自主研发的外骨骼机器人:人体运动意图控制机器人系统2018-01-19 3961
-
京东物流人员穿戴外骨骼机器人曝光,工业外骨骼迎来春天2017-11-14 10987
全部0条评论

快来发表一下你的评论吧 !
