

基于西门子S7-1200PLC的编程控制案例
工业控制
描述

 一、动作描述
一、动作描述 
1.我们在模拟软件上搭建了一个简单传送带,并配置了控制面板;
2.通过模式选择开关,可以选择自动/手动模式;
3.自动模式下按自动启动按钮,引入传送带自动运行,当货物触碰A传感器时,长传送带正方向运转,当货物触碰B传感器时,长传送带反方向运转。
4.按下停止按钮,传送带停止;
5.手动模式下,按前进按钮,传送带正方向点动运转,按后退按钮,传送带反方向点动运转;
6.另有指示灯显示当前运行状态。
二、硬件设备
1.一台装有博途及其仿真软件、FACTORY IO软件的PC。
三、软件
1.西门子PLC编程软件:TIA 博途V16
2.博途仿真软件:PLCSIM V16
3.FACTORY IO软件
四、I/O分配
| 输入点 | 注释 | 输出点 | 注释 |
| I0.0 | 开始按钮 | Q0.0 | 开始指示灯 |
| I0.1 | 停止按钮 | Q0.1 | 停止指示灯 |
| I0.2 | 传感器A | Q0.2 | 长传送带正方向 |
| I0.3 | 传感器B | Q0.3 | 长传送带反方向 |
| I0.4 | 手动前进 | Q0.4 | 引入传送带运行 |
| I0.5 | 手动后退 | Q0.5 | 塔灯绿 |
| I0.6 | 自动模式 | Q0.6 | 塔灯黄 |
| I0.7 | 手动模式 |
五、程序编写及思路
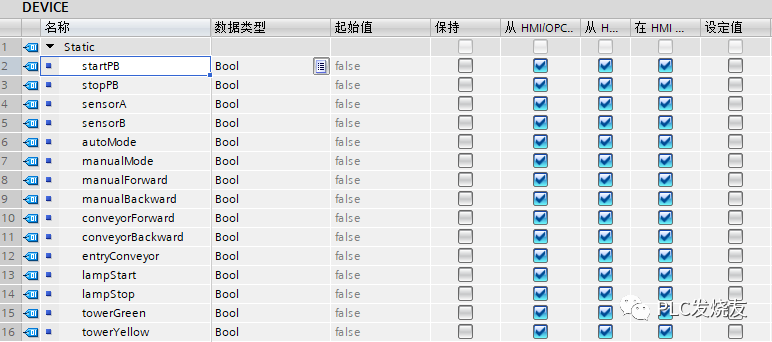
为便于后期修改,我们把外围设备统一做成DB块,如图:
并通过一个FC块,来完成DB块和实际IO变量表的映射:
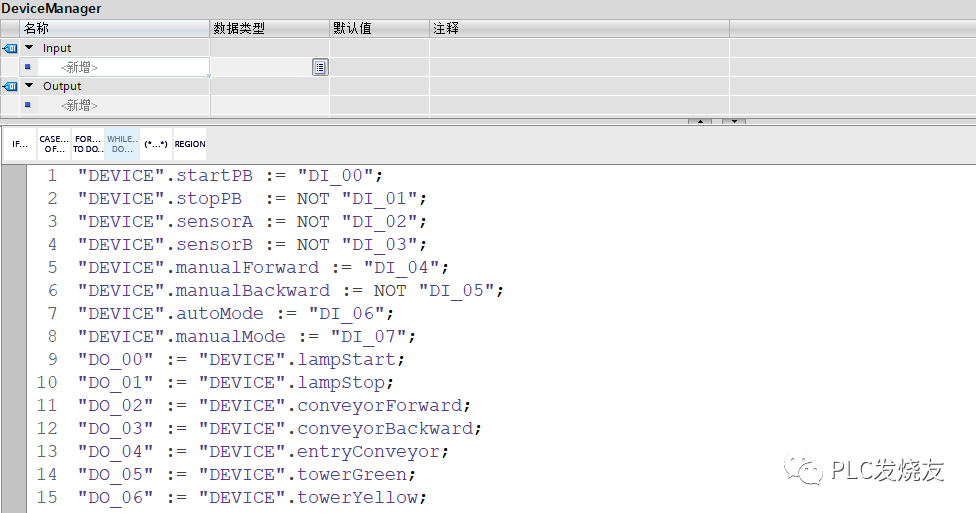
接下来我们开始写程序:
首先我们定义两个传感器的上升沿:

然后通过旋钮选择运行模式:

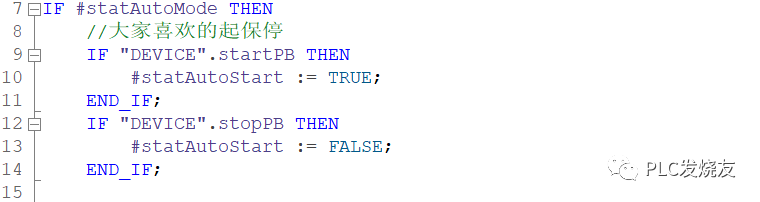
分自动模式和手动模式分别编写程序,首先编写自动程序:
在自动模式下按下启动按钮,则启动自动运行;按下停止按钮则停止自动运行。
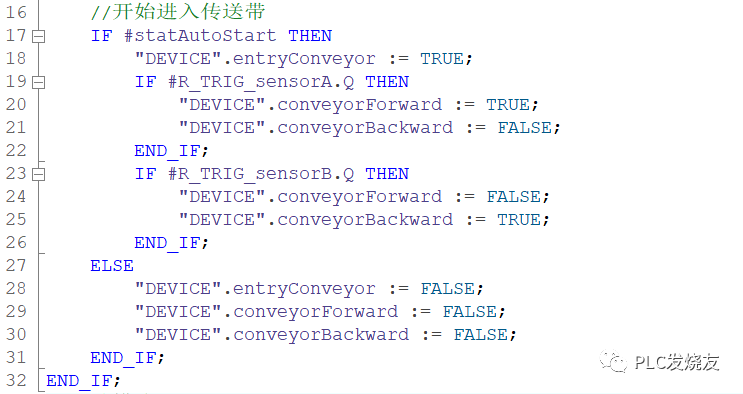
在自动运行模式下,引入传送带直接运行,然后判断货物是否触碰传感器。触碰传感器A,则传送带正方向运行;触碰传感器B,则传送带反方向运行;如果自动运行模式丢失,则停止所有传送带运行:
接着写手动模式,手动模式简单用按钮控制:

最后相应信号输出指示灯:

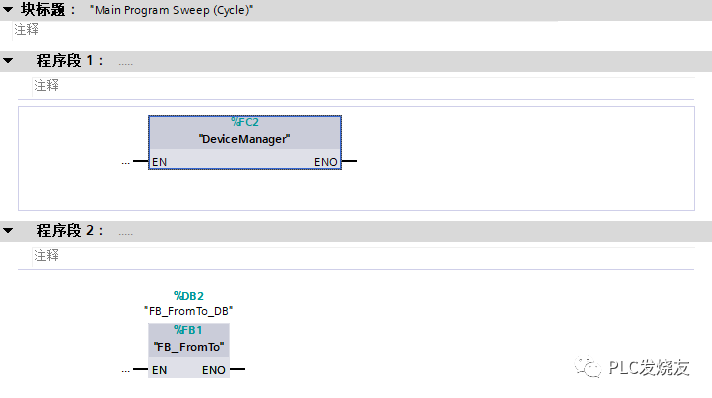
程序完成,在主程序里进行调用即可。
总结:此程序虽然简单,用LAD写更简单,但目的是培养SCL高级语言编程的基本逻辑和基本语法,提高综合编程能力。
编辑:黄飞
-
武夷山高价回收西门子S7-1200PLC可编程模块2152021-04-07 709
-
西门子plc编程入门教程2017-11-14 52302
-
西门子S7-1200 和 S7-1500 的编程指南pdf下载2018-03-27 9317
-
怎么让Smart line系列触摸屏与西门子S7-1200PLC与时间一样2019-07-31 12532
-
如何将S7-1200PLC连接到EMCP物联网云平台2020-06-30 7181
-
西门子S7-1200可编程控制器系统手册2021-04-22 2155
-
西门子S7-1200和S7-1500编程风格指南2022-08-17 1673
-
通信教程:西门子S7-1200PLC与组态王2023-02-23 6766
-
利用Modbus采集网关采集西门子S7-1200plc数据2023-03-08 3133
-
西门子1200PLC之间的ModbusTCP通讯如何实现?2023-07-30 14314
-
西门子Smart line系列触摸屏如何与S7-1200PLC的时间同步2023-08-04 6975
-
使用钡铼BL102网关连接西门子S7-1200PLC接入mosquitto服务器方法2022-04-11 3225
-
PLC西门子S7-200smart和S7-1200的区别?2023-11-17 18436
-
西门子S7-1200 PLC的基本功能2024-06-13 5274
-
西门子S7-1200 PLC的指令介绍2024-06-18 7392
全部0条评论

快来发表一下你的评论吧 !
