

KST_WorkVisual-KUKA用KRC浏览器在线工作的方法
描述
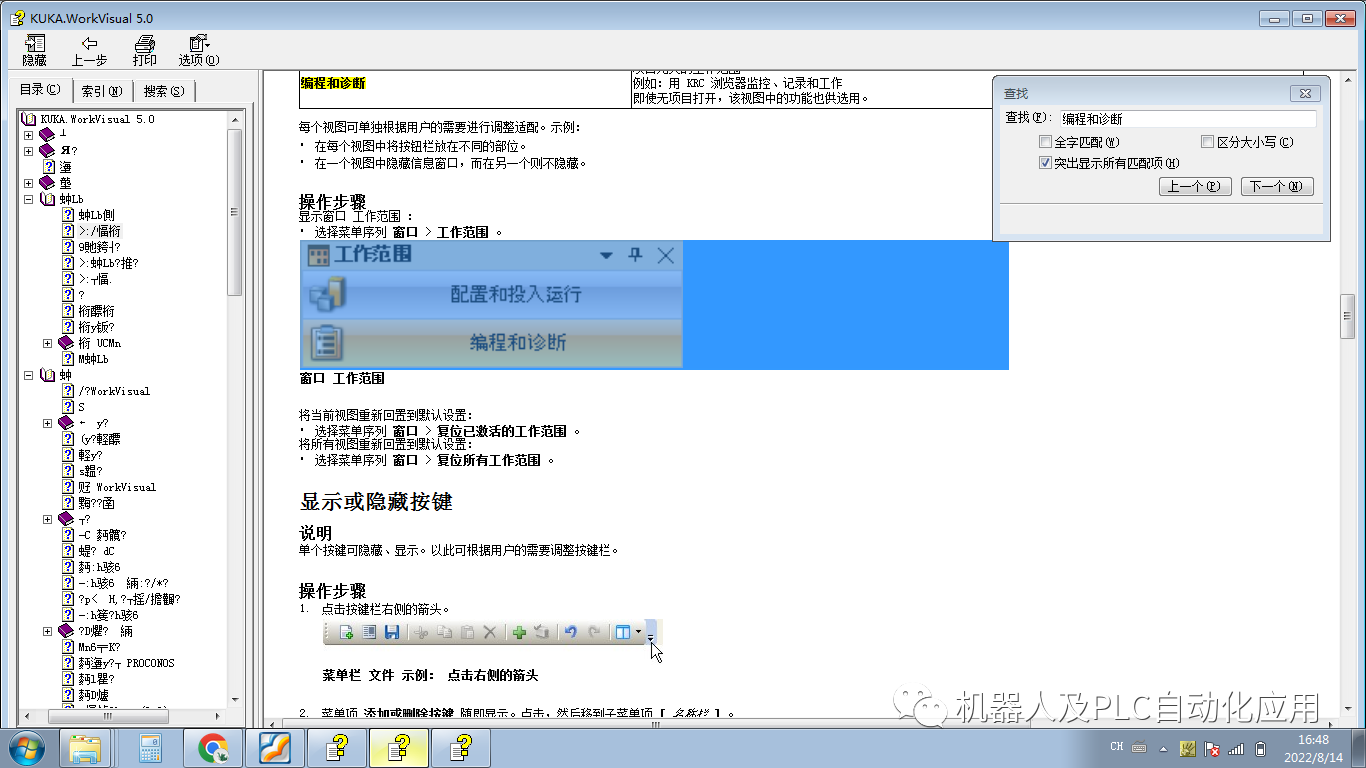
仅在 编程和诊断 工作区域内:
"Programming and diagnosis "

|
将 WorkVisual 工作目录中的更改传输到实际所用的机器人控制系统上。 将更改传输给机器人控制系统 |

| 从机器人控制系统载入更改。 |

|
与实际所用机器人控制系统的工作目录建立连接。 在 KRC 浏览器中打开工作目录 |
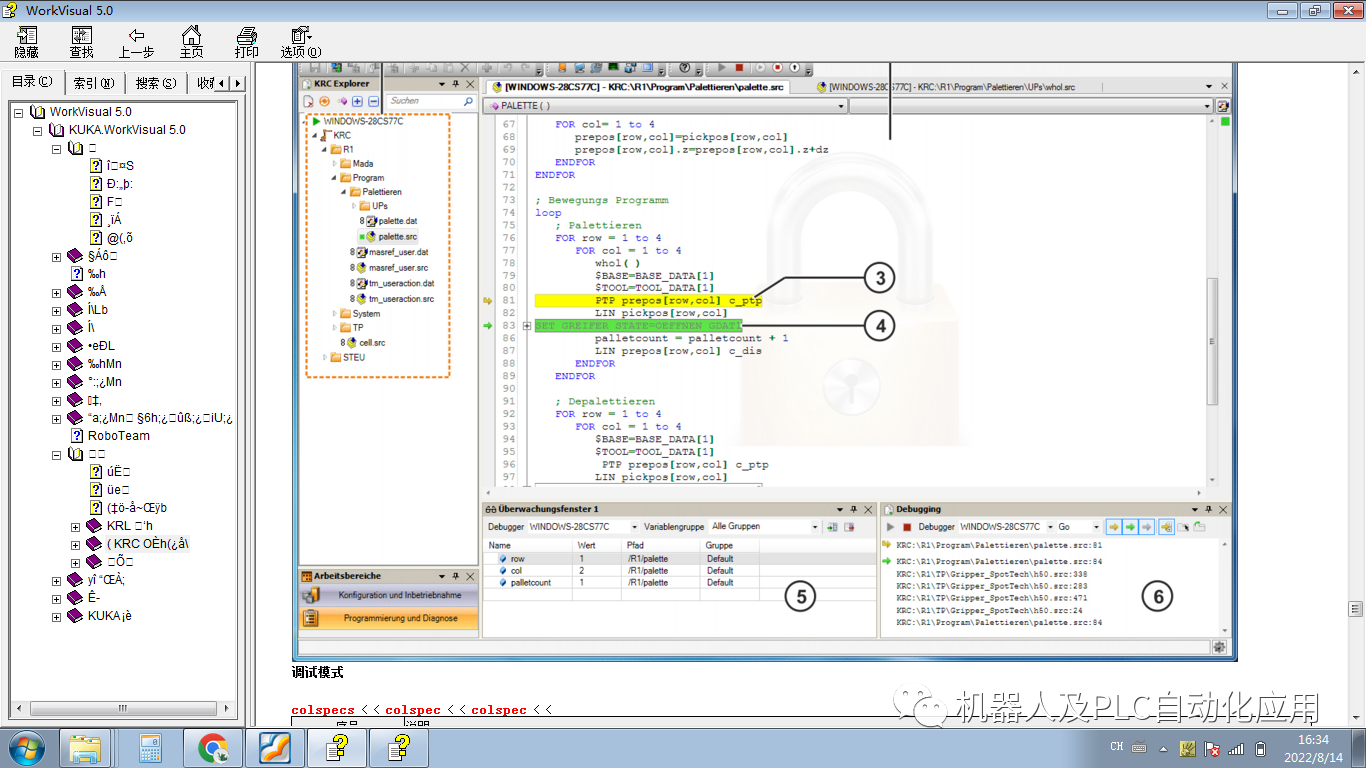
在线编辑后在线下载程序
将 WorkVisual 工作目录中的更改传输到实际所用的机器人控制系统上。
通过该操作步骤可将 WorkVisual 工作目录中的全部更改或仅选出的更改传输给实际所用的机器人控制器。
前提条件
| • |
与实际应用的机器人控制系统的网 络连接 |
| • | 实际应用的机器人控制系统和 KUKA smartHMI 已启动。 |
| • | 专家用户组 |
| • | 运行方式 T1 或 T2 |
| • | 工作范围 编程和诊断 |
操作步骤
| 1. |
传输所有更改:选定工作目录的根节点。 传输所选的更改:选定应传输的文件或文件夹。 |
| 2. |
点击按钮 将更改传输到控制器 。 或者:点击右键并在弹出菜单中选择 传送改动 。 将会检查更改有无冲突。如果有冲突,会显示一条信息。冲突必须解决,否则不能传输更改。如果没有冲突,则显示更改概览。 |
|
| • | 不更改 |
| • | 用工作目录中的文件覆盖实际所用机器人控制系统上的文件 |
| • | 合并文件 |
| 3. | 如果并不是传输所有显示的更改:在相应更改的复选框中取消勾选。 |
| 4. | 用 Ok 确认。KUKA smartHMI 显示安全询问 用户 […] 请求远程访问该控制系统。是否允许远程访问?。 |
| 5. | 点击 是 确认询问。更改即被传输。smartHMI 显示信息 用户 […] 请求远程访问该控制系统。在用 撤销 对信息确认之前,始终可以访问。 |
用 KRC 浏览器在线工作
| 该功能只能用于装有库卡系统软件 8.3.15 以上版本或 VW 系统软件 8.3.11 以上版本的机器人控制系统。 |
在 KRC 浏览器中打开工作目录
前提条件
| • | 与实际应用的机器人控制系统的网络连接 |
| • | 实际应用的机器人控制系统和 KUKA smartHMI 已启动。 |
| • | 工作范围 编程和诊断 |
操作步骤
| 1. |
点击按键 创建连结 。 或者:在 KRC 浏览器中用右键点击空白区域并在快捷菜单中选择 创建连结 。 用于选择机器人控制系统的窗口打开。在该窗口中可按照控制系统的类型和版本进行筛选。此外还可以使用搜索功能来搜索控制系统的名称。 |
| 2. | 选择所需的机器人控制系统并用 Ok 确认。机器人控制系统的工作目录即被载入并显示在 KRC 浏览器中。 |
KRC 浏览器操作界面
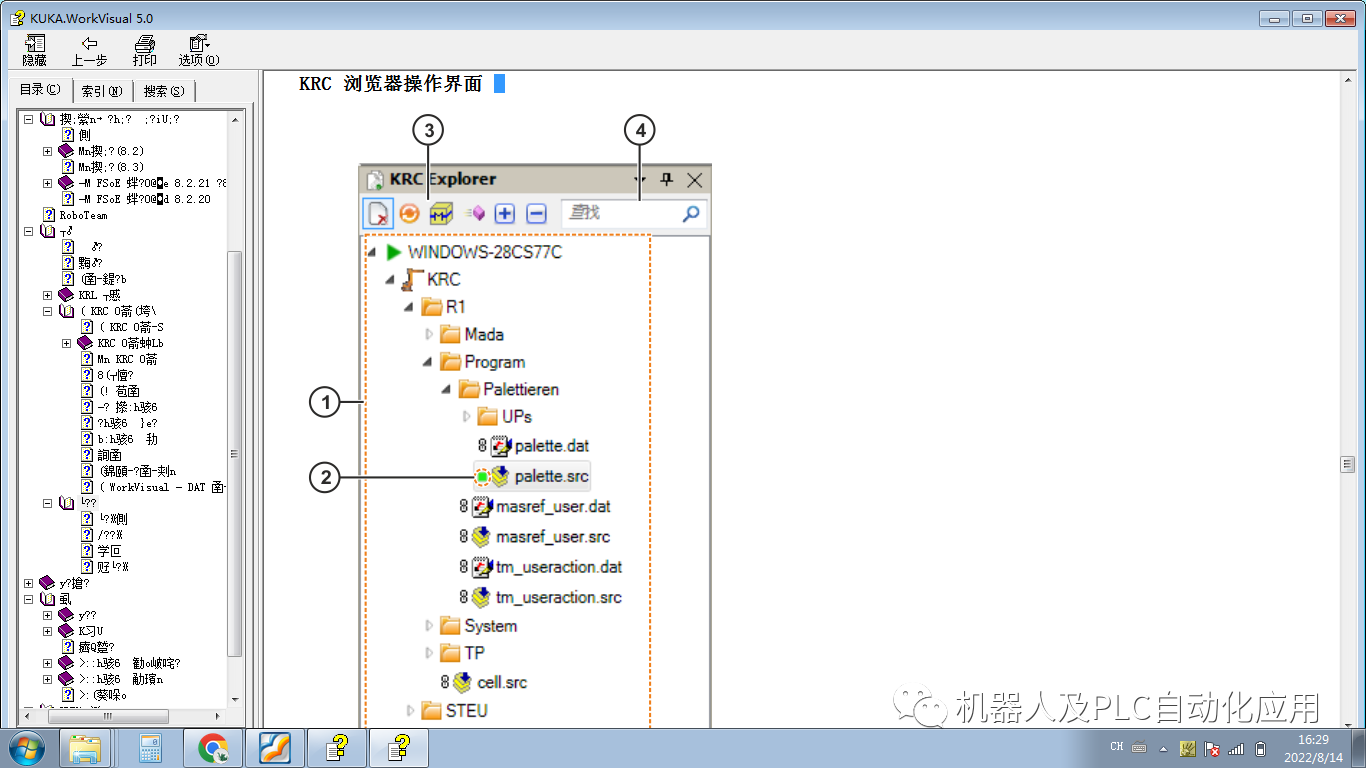
| 1 | 机器人控制系统的工作目录 |
| 2 |
图标显示文件夹或文件的当前状态。鼠标悬停在图标上方时,显示具有状态说明的工具提示。在某些状态下会显示额外信息。例如当文件已被移除时,在工具提示中显示原始路径。 KRC 浏览器中的图标 |
| 3 |
按键栏 KRC 浏览器中的按键栏 |
| 4 | 在搜索栏中可以搜索文件名与文件夹名。 |
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
AWTK 最新动态:支持浏览器控件2024-11-20 1362
-
浏览器javascript被禁用怎么解开2023-11-26 26221
-
KUKA用KRC浏览器在线工作2022-08-15 2380
-
谁打败了IE浏览器?ie为什么被放弃?ie浏览器还有人用吗?2022-06-16 4153
-
可搭建私人网盘的在线文件浏览器2021-09-23 3802
-
推荐谷歌浏览器的插件工具uTools2020-07-13 2650
-
创建新的开源浏览器非常困难2020-03-20 2752
-
基于JavaScript浏览器兼容性测试方法2017-12-04 1295
-
四大浏览器续航对决,结果Chrome浏览器完胜2017-06-27 1703
-
liebao浏览器2017-03-20 1138
-
视频监控系统跨浏览器插件的研究与实现2015-12-18 854
-
用什么浏览器好?2012-06-24 3353
-
Web浏览器,Web浏览器是什么意思2010-03-22 21197
全部0条评论

快来发表一下你的评论吧 !
