

CAN总线通信详解
描述
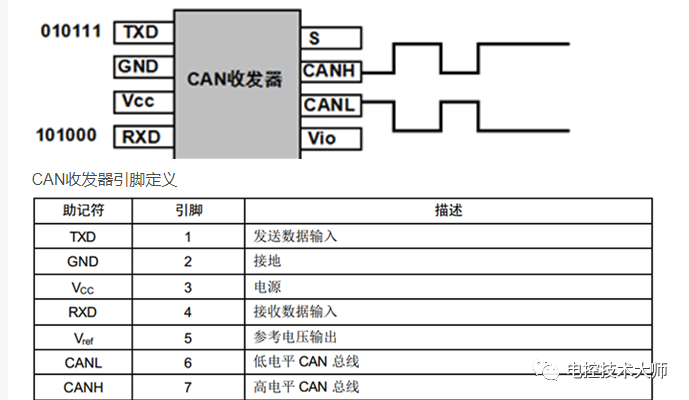
一、CAN相关芯片
1.CAN控制器
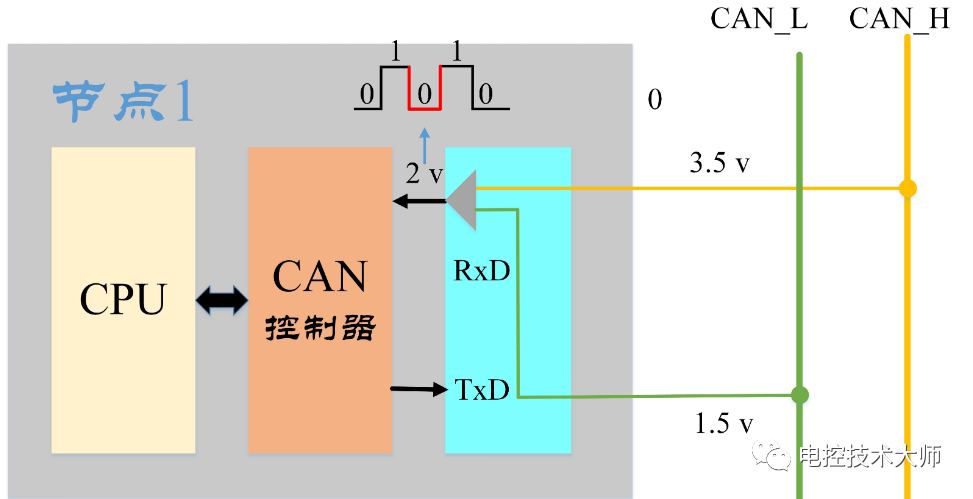
2.CAN收发器:CAN收发器的作用是负责逻辑电平和信号电平之间的转换。
即从CAN控制芯片输出逻辑电平到CAN收发器,然后经过CAN收发器内部转换将逻辑电平转换为差分信号输出到CAN总线上,CAN总线上的节点都可以决定自己是否需要总线上的数据。
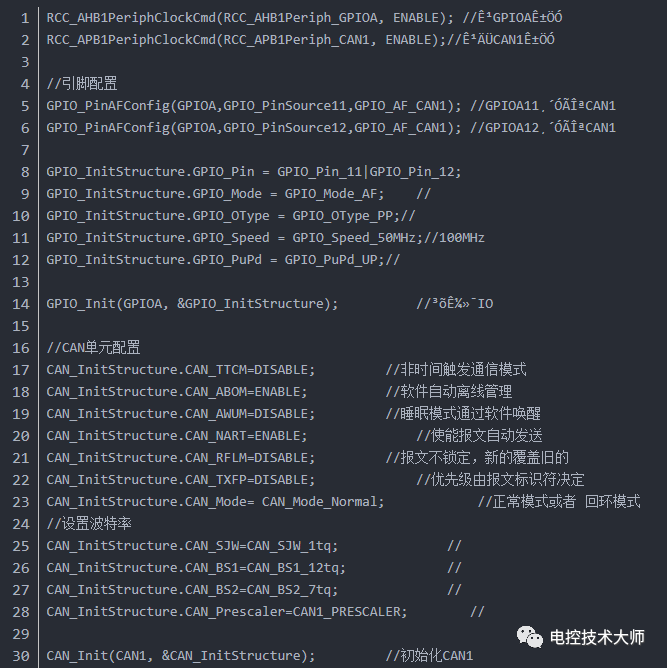
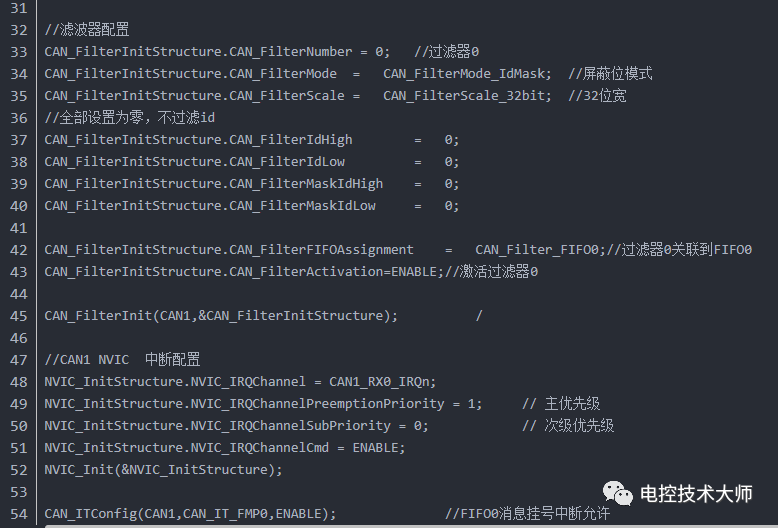
二、CAN的配置
void CAN1_Config_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
三、CAN波特率计算公式

CAN波特率=系统时钟/分频数/(1*tq+tBS1+tBS2)
其中
tBS1=tq*(TS1[3:0]+1)
tBS2=tq*(TS2[2:0]+1)
tq=(BRP[9:0]+1)*tPCLK
这里tq表示1个时间单元
tPCLK=APB时钟的时间周期
BRP[9:0],TS1[3:0]和TS2[2:0]在CAN_BTR寄存器中定义
总体配置保持
tBS1>=tBS2,tBS2>=1个CAN时钟周期,tBS2>=2tSJW
四、CAN的发送与CAN的接收
1、发送过程:CAN控制器将CPU传来的信号转换为逻辑电平(即逻辑0-显性电平或者逻辑1-隐性电平)。CAN发射器接收逻辑电平之后,再将其转换为差分电平输出到CAN总线上。
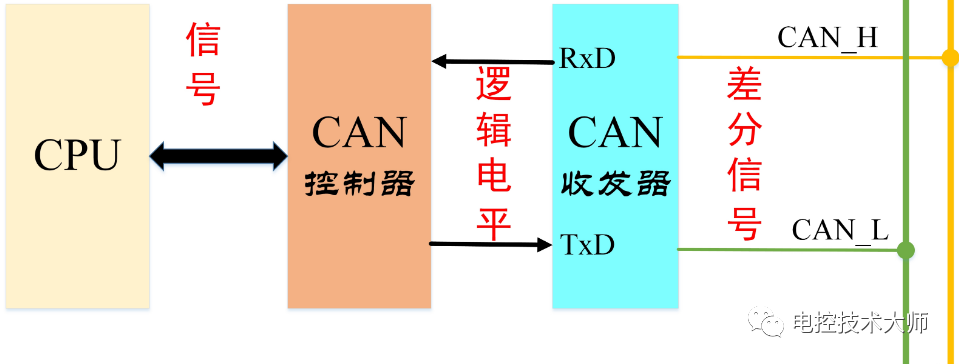
2、接收过程:CAN接收器将CAN_H 和 CAN_L 线上传来的差分电平转换为逻辑电平输出到CAN控制器,CAN控制器再把该逻辑电平转化为相应的信号发送到CPU上。
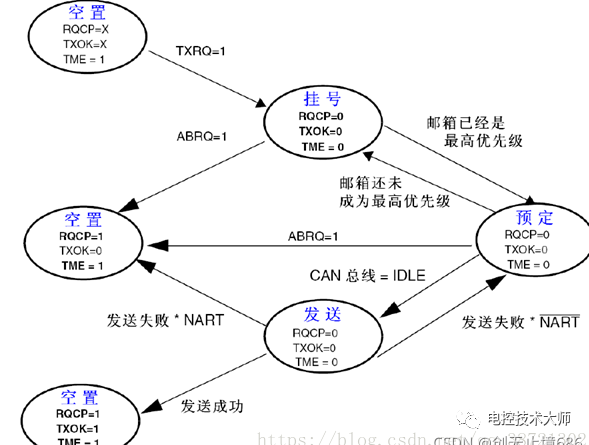
五、STM32 CAN控制器简介-发送流程和接收流程
程序选择1个空置的邮箱(TME=1)->设置标识符(ID),数据长度和发送数据->设置CAN_TIxR的TXRQ位为1,请求发送->邮箱挂号(等待成为最高优先级)->预定发送(等待总线空闲)->发送->邮箱空置
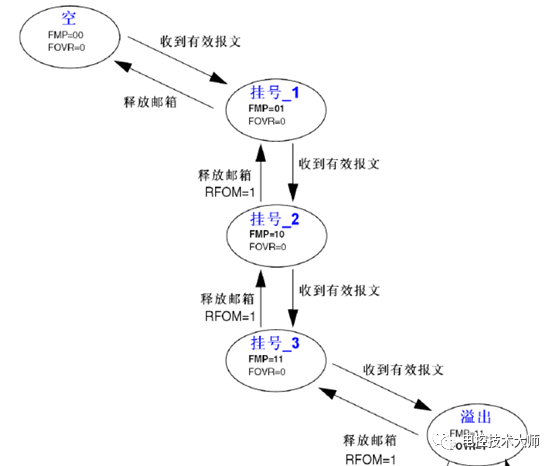
FIFO空->收到有效报文->挂号_1(存入FIFO的一个邮箱,这个由硬件控制,我们不需要理会)->收到有效报文->挂号_2->收到有效报文->挂号_3->收到有效报文->溢出。
CAN收到的有效报文,存储在3级邮箱深度的FIFO中。FIFO接收到的报文数,我们可以通过查询CAN_RFxR的FMP寄存器来得到,只要FMP不为0,我们就可以从FIFO读出收到的报文。
审核编辑:汤梓红
-
CAN总线通信原理介绍 CAN总线模块选择指南2024-11-21 4416
-
CAN总线通信协议详解2024-11-12 5339
-
基于FPGA的CAN总线通信节点设计2023-06-18 4717
-
详解CAN总线通信优先级机制2022-10-25 3808
-
CAN通信总线详解2021-08-31 1792
-
CAN总线详解 精选资料分享2021-08-20 2566
-
详解汽车CAN总线2019-07-26 14663
-
CAN总线通信报文验收滤波、位定时与同步详解2018-05-07 12625
-
汽车can总线工作原理及测量方法详解2018-04-25 151748
-
CAN总线通信详解2016-03-30 1409
-
CAN总线详解2016-03-22 811
-
CAN总线通信原理分析2012-05-08 2732
-
CAN总线通信电路2008-10-14 6991
全部0条评论

快来发表一下你的评论吧 !
