

无人机不能使用77GHz雷达的原因解析
军用/航空电子
描述
无人机不能使用77GHz雷达的原因:77GHz频段是专门被划分于车载应用的,包括早期的76GHz-77GHz频段,以及后来新增加的79GHz-81GHz频段,总共4GHz的频段。这一频段是国内外雷达毫米波在汽车车载应用领域的研究热点,也是目前市场上主流的车载雷达使用的频段。如果无人机雷达也使用这一频段,会造成严重的干扰问题,影响无人机和车辆的安全性和可靠性。
工业和信息化部关于印发汽车雷达无线电管理暂行规定的通知:
工信部印发《汽车雷达无线电管理暂行规定》汽车雷达使用频率(76~79GHz频段)、主要使用场景,明76~79GHz频段不能用于其他类型陆基雷达,也不能用于在航空器(含无人机、气球、飞艇等)上装载使用的雷达。
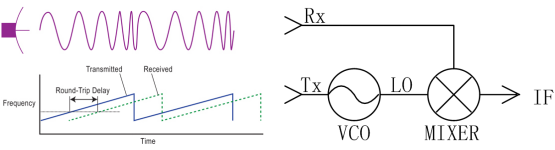
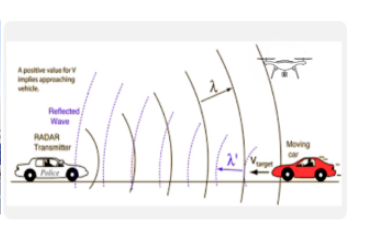
雷达工作原理
雷达发射一个短脉冲的电磁波,当这个电磁波遇到目标物体时,会反射回来。通过测量这个反射信号的时间和频率,雷达可以确定目标物体的位置和速度。在无人机雷达中,通常使用毫米波频段进行探测,当多个无人机使用同一种雷达,就会产生干扰。
毫米波雷达干扰原理
毫米波雷达干扰的原理是指不同的毫米波雷达之间使用相同或相近的频率,导致信号相互干扰,影响雷达的检测性能。毫米波雷达干扰主要有两种类型:交叉干扰和并行干扰。
交叉干扰:指不同的毫米波雷达使用不同的调频斜率,当两个雷达的信号相交时,会产生一个短暂的干扰信号,使得噪声电平增加,降低信噪比,导致目标检测概率降低或出现盲区,交叉干扰经常发生,会影响chirp信号中的一小部分采样点。 并行干扰:指不同的毫米波雷达使用相同的调频斜率,当两个雷达的信号非常接近时,会产生一个恒定频率的干扰信号,使得在频域上出现一个虚假目标,影响真实目标的追踪。并行干扰很少发生,但是却影响整个chirp信号。
下面是一个简单的表格,比较了两种干扰的特点和影响:

违反政策规定会受到处罚:
违反毫米波雷达频率规定的后果取决于国家及其法律。例如,在美国,联邦通信委员会(FCC)监管无线电频率的使用,并制定了毫米波雷达频率使用规则。违反这些规定可能会受到罚款、设备扣押等处罚。
解决毫米波雷达之间干扰问题在未来主要有以下几个趋势:
标准化:不同的雷达设置不同的频段和时隙,以避免频率和时间上的重叠和干扰。 弹性技术:使用复杂的波形设计和信号处理算法,以检测并修复接收到的干扰信号,例如时频域技术、基于幅度屏蔽的方法等。 天线技术:使用较窄的电子扫描波束或多天线阵列,以降低空间上的干扰风险和提高角度分辨率。 协作技术:使用车联网或者雷达网络,以实现多个雷达之间的信息共享和协同工作,以提高检测性能和抗干扰能力。 总的来说,虽然77GHz频段在无人机雷达中具有很好的探测精度,但由于政策规定、频段冲突等问题,无人机雷达不能使用该频段进行探测。建议用户可采用其他频段进行探测,如24GHz、60GHz或80GHz频段,都是不错的选择。
MR82 80GHz无人机避障雷达

纳雷无人机产品全家福
根据无人机定高和避障的不同应用功能场景,纳雷推出了无人机系列毫米波雷达产品,分别有NRA15 100m高度计雷达、NRA24 200m高度计雷达和MR82 80GHz避障雷达,可以满足客户多样化的需求,给客户更多的选择。


编辑:黄飞
-
强化射频与MCU性能 车用77GHz雷达性价比攀升2013-04-03 6917
-
77GHz车载雷达现状趋势及总体电路设计实现方案2017-06-26 4878
-
77GHz毫米波雷达芯片方案大比拼,哪家方案最有看点?2019-04-05 35740
-
77GHz汽车雷达方案,威慑海外大厂2016-03-09 18102
-
无人机侦测和反制系统2017-04-05 8627
-
【论文】77GHz毫米波车载雷达总体电路设计2017-06-28 20974
-
无人机WiFi模块SKW77的应用小结2018-04-20 3535
-
现有77GHZ雷达开发板在算法验证中的不便之处分析2018-09-29 3728
-
无人机探测技术2020-07-29 2964
-
毫米波雷达77GHZ 79HGZ PBT透波材料 汽车ACC,无人机 ,道砸 防砸系统2020-11-27 6638
-
毫米波雷达模块发展,无人机雷达避障技术应用,雷达传感器方案2021-09-27 1657
-
RFbeam发布77GHz汽车雷达开发套件2016-12-01 5987
-
汽车ADAS系统和无人驾驶技术的重要传感器,77GHz毫米波雷达正在替代24GHz成为主流2018-08-13 15951
-
77GHz 雷达传感器在汽车和工业中的应用2023-11-23 1494
-
佛瑞亚海拉第五代77GHz雷达荣获《汽车观察》智輅奖2024-05-06 2113
全部0条评论

快来发表一下你的评论吧 !
