

机器人视觉抓件系统抓取零件不到位的原因
机器人
描述
最近视觉抓件系统一直会出现抓取零件不到位的问题.下面我将分析一下问题出现的原应.
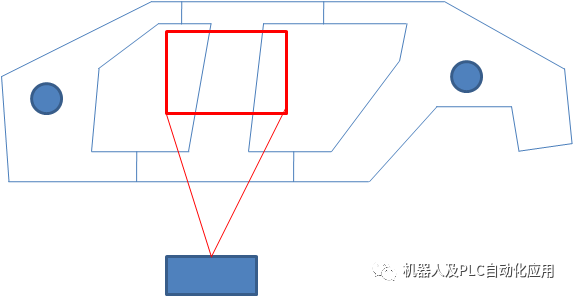
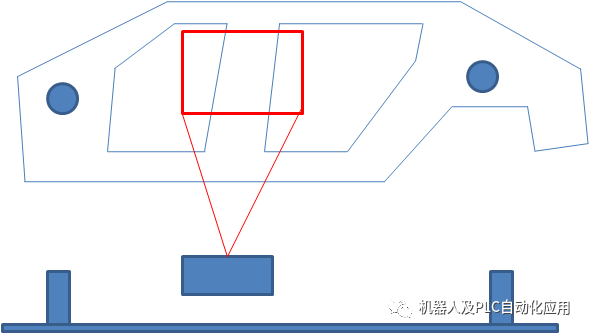
单相机测点,测量车身侧围外板B /内板B,计算出的车身整体偏差值是B柱的旋转和变化量.因此对于车身整体的变化量存在偏差.零件大的组装件容易出现这种问题.因此要区分对待侧围内板和侧围外部的抓取视觉的计算方法.
1.车身侧围内板:
应设置两个相机对应机器人抓手上的定位销附近,计算两个定位空的偏差值.由于机器人抓手是固定的所以,要计算出两空的变化对应车身坐标系的整体变化值.这样计算出的机器人BASE坐标系下的偏差值最准确,机器人的抓取效果最好。
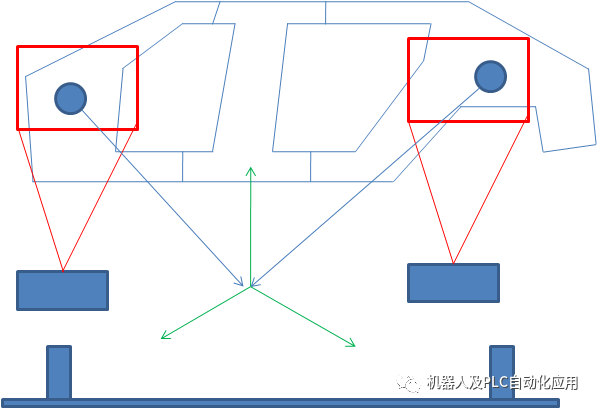
如果机器人抓手不使用定位销定位,则可以使用一个相机的方法进行粗略抓取,问题会很少。
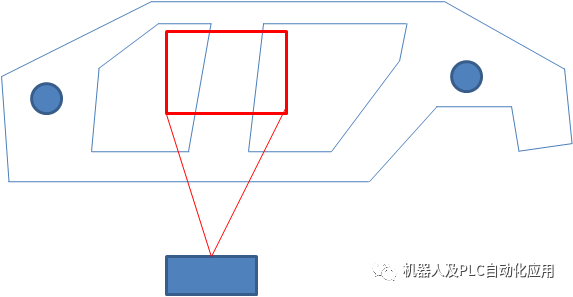
2.车身侧围外板:
侧围外板是一个整体件,用一个相机照车身B柱是没有问题的.整体大件由于不需要搭接工艺,因此可以使用一个相机和定位销定位抓取的方法.
如何保证每次抓取零件时的位置时一致的?
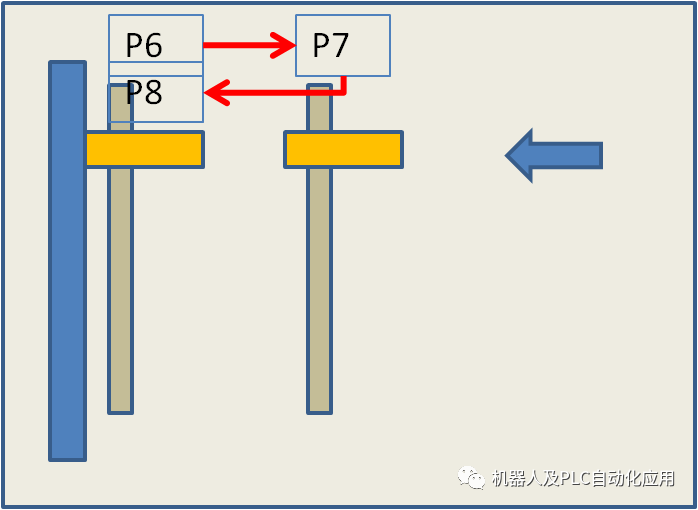
LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P
P6 ---接触工件位置M29
LIN VB=700[mm/s] VE=0% ACC=100% RobWzg=20 Base=31 SPSTrig=5[1/100s]P
P7---返回测量位置
LIN VB=400[mm/s] VE=0% ACC=100% RobWzg=31 Base=31 SPSTrig=5[1/100s]P
P8---抓件
使用大众标准自带的USER程序.
LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P 寻找零件
5: Tech_ Baseverschiebung Suchlauf Base 31 setzen - - - xyz-MaxWeg:- Nahsensor=M29 EIN
改变抓件点的BASE程序.
编辑:黄飞
- 相关推荐
- 热点推荐
- 机器人
-
爬壁机器人的吸附方式有哪些 爬壁机器人有哪些零件组成2023-08-01 3346
-
大众机器人视觉抓件系统出现抓取零件不到位的问题2023-04-17 912
-
大众机器人视觉抓取问题及抓取步骤2023-03-24 1805
-
浅析一下KUKA机器人抓件2022-11-07 1586
-
机器人视觉抓取问题出现的原因和解决方法2022-07-08 4076
-
浅谈机器人视觉抓件系统不到位问题2022-04-20 2749
-
机器人视觉系统研究2021-09-07 2522
-
使用机器视觉实现零件尺寸自动测量系统的详细资料说明2021-03-12 1818
-
想知道柔性振动盘为什么要结合视觉引导系统和机器人抓取吗?2020-07-14 1311
-
如何为您的零件选择合适的机器人机械手夹爪2020-05-29 3658
-
【MYD-CZU3EG开发板试用申请】基于机器视觉的工业机器人抓取工作站2019-09-18 2113
-
机器视觉让机器人能在储存箱中拾取小型零件2018-05-10 2297
-
使用NI视觉硬件和软件为接线盒零件设计集成的视觉化和机器人化2010-03-11 732
全部0条评论

快来发表一下你的评论吧 !
