

有关AGV底盘结构的详细概述
电子说
描述
AGV底盘是自动导航车辆(AGV)的重要组成部分。其结构设计的好坏直接影响着AGV的稳定性、速度、载重能力等多个方面。本文将对AGV底盘结构进行深入分析。
一、单舵轮驱动结构【适合1T以上负载,牵引车,叉车类应用场景】
单舵轮驱动结构是最简单的结构之一,其结构由1个舵轮和2个定向轮组成,在叉车上面有着非常广泛的应用。这种结构可以直接适应各种地面,保证驱动舵轮一定着地。根据车重心分布的不同,舵轮是大概会承担50%的自重,所以牵引力非常强。 但其缺点也显而易见,单轮驱动的AGV在行驶过程中容易发生偏移,并且转弯时需要采用一定的技巧进行控制。
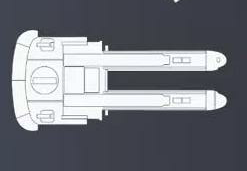
单舵轮驱动
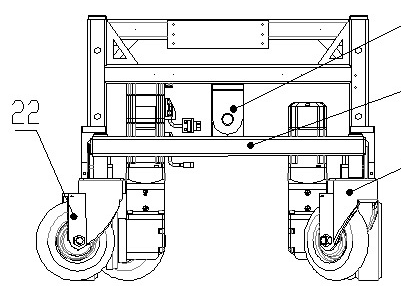
二、双舵轮驱动结构【适合1T以上负载,同时要求可以任意方向平移的场合】
双舵轮驱动结构是目前市场上最常见的结构之一,其结构由两个驱动轮和一个或多个非驱动轮组成,通常应用于中等载重的AGV上。由于其结构设计合理,可以更好地保持AGV在直线行驶时的稳定性,并且转弯时无需特殊技巧,因此在市场上得到了广泛应用。
双舵轮底盘常见的2种结构形式有:
1)舵轮居中布置:舵轮布置在车体中心线上,前后对称布置,直线行走时,前后舵轮调整同样的角度实现路径偏移调整,自转时,左右舵轮转动90度,变成差速式,可实现自转。
2)舵轮对角布置:舵轮中心对称布置,运动形式相较中心线布置时调整较为复杂。
双舵轮驱动1
双舵轮驱动2
三、两轮差速驱动结构【适合500KG~1.5T负载的AGV,可以原地旋转,不能平移】
两轮差分驱动底盘可以分2种:3轮结构、6轮结构。
①3轮结构:2个驱动轮、1个万向轮。在服务机器人上应用较多。但其缺点是:原地旋转时,占用空间较大。因为是3轮结构,所以轮与车架采用刚性连接就可以。
②6轮结构:2个驱动轮在中间、4个万向轮在车的4个拐角。6轮结构,必须做特殊浮动处理,才可以保证2个驱动轮始终受力着地。
两轮差速驱动
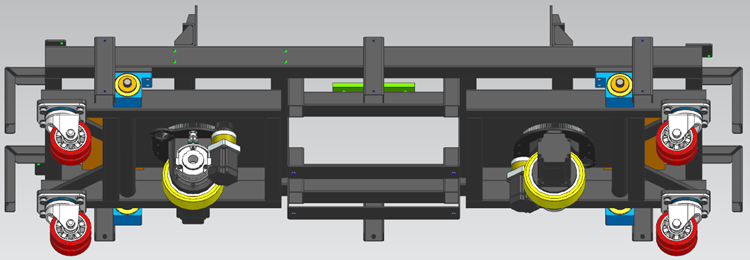
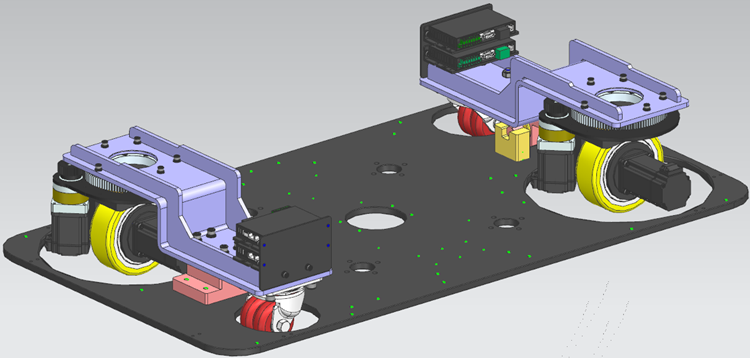
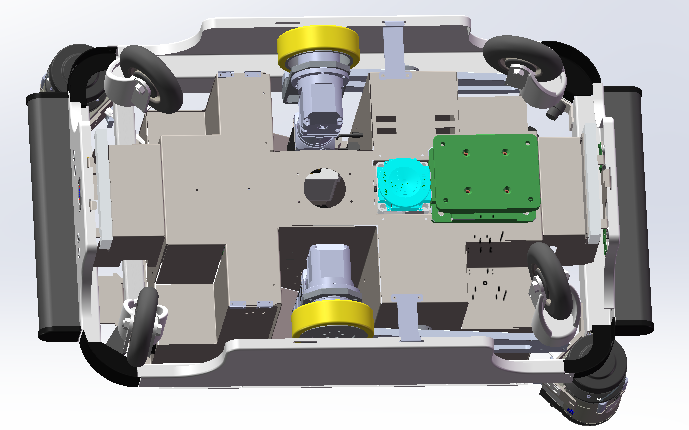
四、麦克纳姆轮驱动结构【适合运行频率较低、同时要求任意方向(固定)平移和旋转的场合】
麦克纳姆轮底盘由4个麦克纳姆轮组成,麦克纳姆轮的滚轴倾斜角必须按照下图布置。
该底盘的优点是:可以任意方向平移或旋转,是运动灵活度最好的底盘。
运动学要求4个轮子必须同时着地,这样才可以达到理想的运动控制。4个轮子如果刚性与底盘连接,根据3点确定1个平面的原理可以知道,其中1个轮子必然悬空或受力很小。为了解决该问题,有如下2种建议方式:
1)将前面或后面2个轮子使用弹簧做成上下浮动结构。
2)将前面或后面2个轮子做成一组浮动桥臂。所谓的平衡桥臂就是1根杆上面左右固定2个轮子,中间做一个铰接轴和车架固定。使2个轮子合并为1个受力点。从而使4个麦克纳姆轮都可以同等受力。
麦克纳姆轮驱动
总的来说,AGV底盘的结构设计应根据自身的使用环境、载重和行驶速度来进行选择。在选择时,需要注意的是结构的稳定性、驱动能力、转弯半径等因素,同时要考虑生产成本和维护成本的平衡。
底盘最终性能要求:
1)面对各种高低起伏的路面,所有驱动轮必须着地,这样驱动轮才可以正常传递牵引力,否则出现悬空打滑的现象。
2)空载和满载状态下,传递到驱动轮上面的正压力足够大,足以驱动上爬设计坡度。
最大牵引力=驱动力正压力x驱动轮摩擦系数
需要克服阻力=滚动摩擦阻力+自重在坡度方向的分量
审核编辑 黄宇
-
汽车底盘构造图2008-05-27 20487
-
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV2017-06-10 8389
-
树莓派整体结构与功能模块2021-08-11 1811
-
小车底盘结构和搭建过程2021-08-23 2015
-
AGV的基本概念及基本结构组成2021-09-14 3099
-
基于RT-Thread+RA6M4的麦轮结构的底盘运动控制系统设计案例2022-08-17 1842
-
硬盘结构原理图2008-04-01 6102
-
表面贴装设计与焊盘结构标准2016-08-18 757
-
深度解析新福克斯底盘2018-07-12 24187
-
【底盘大PK】高尔夫6/英朗XT/新福克斯2018-07-04 6715
-
机器人的底盘结构是怎样的2020-01-01 7411
-
领衔资讯移动机器人有哪几种底盘结构?2020-02-17 4024
-
实现机器人智能行走的机器人底盘,其内部结构究竟是怎样的2020-12-26 2435
-
【科普】干货!带你从0了解移动机器人(六) (底盘结构类型)2023-10-26 19515
-
AGV底盘全向移动 + 复合作业2025-04-11 1167
全部0条评论

快来发表一下你的评论吧 !
