

德州仪器针对扫地机器人系统的解决方案
描述
近年来,扫地机器人市场快速崛起,越来越多用户和厂商在关注这个领域。 TI在该应用下提供种类丰富的模拟以及嵌入式解决方案,帮忙您快速进行选型和设计。扫地机器人系统可以分为以下几个子系统: 电池管理,电源管理,电机驱动,传感器及信号调理,人机交互界面等部分。
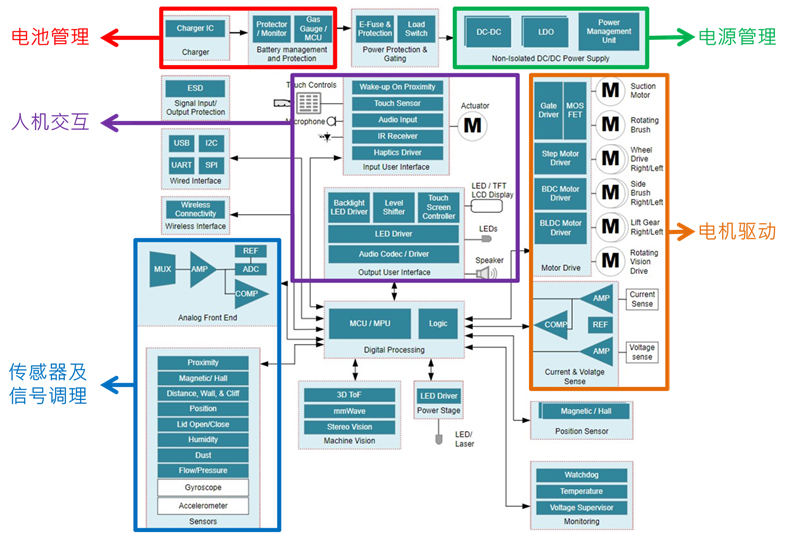
在本系列分享中,将会依次对图中主要子系统进行介绍:
第一节 电池管理
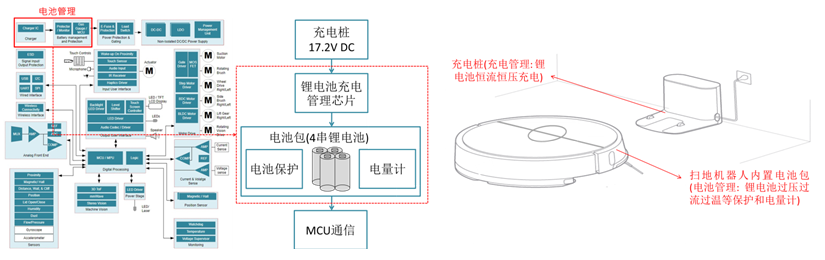
扫地机器人典型应用是四节锂电池串联使用。电池管理分为电池保护以及充电管理两个部分。如下图所示, 电池保护部分一般会设计在电池包里面,针对电池在各种工况下的异常情况进行诊断和保护。 充电管理会在扫地机器人主板上或在充电坞上,负责对锂电池充电曲线进行管理,以实现高效,安全的充电。
下面分别介绍电池充电管理,电池保护和电量计TI相关的解决方案:
1.1 充电管理
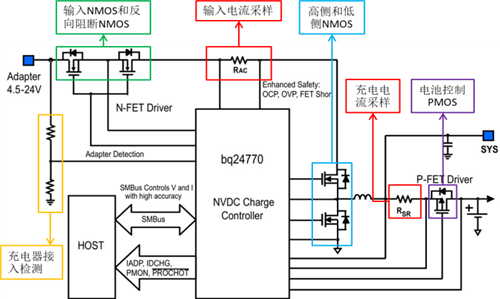
锂电池为了保证电池安全和寿命,对于充电过程要求分为四个阶段:涓流充电(低压预充)、恒流充电、恒压充电以及充电终止。同时还会有电池电压检测、输入电流限制、充电完成后关断充电器、电池部分放电后自动启动充电等功能的要求。这意味着锂电池的充电需要使用专用电池充电芯片,才能更好的保证电池安全和寿命。TI提供的充电芯片BQ24773可从各方面优化充电管理的设计和性能:
|
BQ24773关键参数说明: 4.5V至24V的宽输入输入电压范围,支持1-4节电池 可编程输入电流限制、充电电压、充电电流和最小系统电压调节 20mA 负载条件下,兼具 600μA 超低静态电流和>80% 的高脉冲频率调制 (PFM) 轻负载效率,符合Energy Star 和 ERP Lot6 标准。 +/-0.5电压检测精度,+/-2%输入输出电流采样 支持600KHz-1.2MHz开关频率(可编程设定) |
以上便是BQ24773原理的基本简介,更多细节,请参阅BQ24773数据手册。
TI提供的专用充电IC能够给系统提供精准的充电控制,完备的保护机制。对提升产品质量,优化系统成本有非常重要的意义。 专用充电IC的使用,不仅仅能够给系统带来更全面和精准的充电,还能够提高电池的使用寿命,降低整体的成本。
1.2 电池保护和电量计
该功能的实现有依赖于专用锂电池保护IC。 根据用户的不同需求,TI可以提供四种不同类型的保护方案:
| 保护IC类型 | 型号 | 集成功能 |
| 二级保护芯片 | BQ7718 | 过压检测 |
| 一级保护芯片 | BQ77905 | 过压/欠压保护,放电过流/短路保护,过温/欠温保护 |
| 模拟前端 | BQ76920 | 电压电流温度的测量,以及过压/欠压保护和放电过流/短路保护 |
| 电量计 | BQ4050 | 电量计算,和电压电流温度的全面的保护 |
以下为重点方案的产品介绍:
1) BQ4050
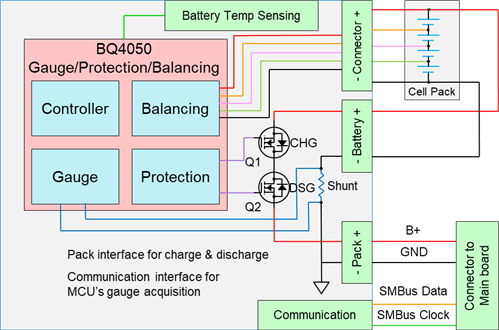
TI的电量计技术在精确测量电池容量、获取反映电池健康状况及安全诊断等数据的同时,还能够实现过压、过流、温度保护和电压均衡等功能。以上电池信息还能够通过SMBUS发送给主机,通过WIFI等方式连接到用户终端,方便用户及时了解扫地机器人的电池健康状况。
德州仪器 (TI) 的 BQ4050 器件采用补偿放电终止电压 (CEDV) 技术,是一款高度集成的高精度 1-4 节电池电量测量仪表和保护解决方案,可实现自主的充电器控制和电池均衡。
|
BQ4050关键参数说明: 双路独立ADC,不仅可以同步电流和电压采样,还可以实现高精度库伦计数器功能使得输入偏移误差< 1µV (典型值) 支持广泛可编程的电池和系统保护,比如过压保护、过流保护和过温保护等 内部旁路的电池均衡功能(被动均衡) 使用补偿放电终止电压(CEDV)算法来测量和计算电池单元中的可用容量,精度可达5%以内 |
以上便是BQ4050原理的基本特性介绍,更多细节请参阅BQ4050数据手册 和BQ4050技术参考手册。
2) BQ77905
锂电池在使用的过程中,一旦出现过压或者过流(短路)等问题,不仅会影响电池的寿命,更会带来安全问题。这意味着所有使用锂电池的设备,必须要加装电池保护器,以使锂电池能在一个相对安全的环境中正常工作。
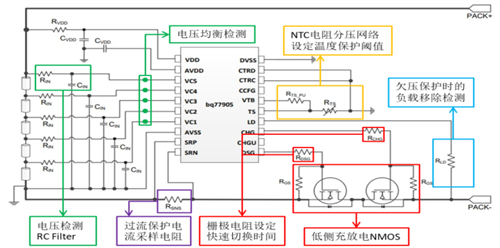
TI提供的BQ77905是3-5 节超低功耗电压、电流、温度和开路可堆叠锂离子电池保护器,无需微控制器 (MCU) 控制即可实现一系列电压、电流和温度保护。该器件正好满足扫地机器人产品4S锂电池的需求,单芯片可实现过压,过流,短路,温度等保护。
|
BQ77905关键参数说明: 电压(过/欠) 、电流(过放/短路)和温度保护(过/欠) 、超高精度测量(电压±10mV) 保护阈值和延迟均为出厂编程设定,多种配置可供选用 集成的独立 CHG 和 DSG 低侧 NMOSFET 驱动器实现电池组保护,这些驱动器可通过两个控制引脚禁用 超低功耗:6µA |
BQ77905还可以支持堆叠使用适应更多节数,更多细节请请参阅BQ77905数据手册 和更多BQ77905应用手册。
第二节 电源管理
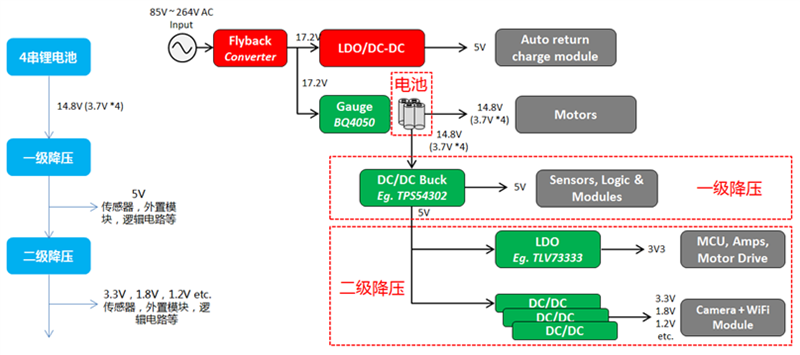
扫地机器人中的电源管理典型的电源轨如下蓝色框图所示:系统从4串锂电池取电,经过一级降压转换为5V,给到外置模块,部分传感器以及相关逻辑电路供电。 5V还会经过二级降压转换为后级系统所需的3.3V, 1.8V等。一级降压电路通常功耗较大,会选择DCDC变换器。而二级降压电路通常功耗较小,可根据用户实际情况选择LDO或者DCDC。一个典型的扫地机器人电源树如下图所示。
2.1 降压型DCDC
通常来讲,带电池设备为了让运行时间更长,系统会对效率,静态功耗等指标提出要求。 同时,成本同样是非常重要的考虑因素。TI的电源管理产品在性能和成本做到很好的平衡。以下为TI在扫地机器人产品中最受欢迎的一些物料,耐压范围从24V-40V不等,适合用于第一级降压电路:
| 型号 | 输入范围(V) | 输出范围(V) | 输出电流(A) | 特点 | 封装 |
| TPS56239H | 4.5-24 | 0.8-16 | 2.0 |
Pin2Pin 兼容 内置补偿网络 精简外围电路 同步整流 |
SOT23-6 |
| TPS54202 | 4.5-28 | 0.8-25 | 2.0 | SOT23-6 | |
| TPS54302 | 4.5-28 | 0.8-25 | 3.0 | SOT23-6 | |
| TPS54308 | 4.5-28 | 0.8-25 | 3.0 | SOT23-6 | |
| TPS54231/331 | 3.5-4.5 | 0.8-25 | 2/3A | 非同步整流 | SOT23-6 |
| TPS54335A | 4.5-28 | 0.8-25 | 3.0 | 频率可调,最高 1.5MHz | SOP-8 |
| LMR14006 | 4.5-40 | 1-36 | 0.6 | 固定频率,2.1MHz或1.1Mhz可选 | SOT23-6 |
| LMR14020 | 4.5-40 | 1-36 | 2.0 |
Pin2Pin兼容 高效率,动态响应好 |
SOP-8 |
| LMR14030 | 4.5-40 | 1-36 | 3.0 | SOP-8 | |
| LMR14050 | 4.5-40 | 1-36 | 5 | SOP-8 | |
| TPS560430 | 4.0-36 | 1-35 | 0.6 | 固定频率,2.1MHz或1.1Mhz可选 | SOT23-6 |
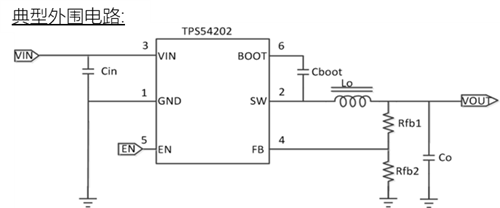
我们以TPS54202举例说明:
该芯片支持最大输入28V持续电压,适合4串锂电池的应用场合。其同步整流的结构可以保证满载时高达98%的效率,同时,由于轻载跳频模式,在轻载情况下可以保证高效,如10mA输出电流情况下效率可达90%以上。
|
TPS54202关键参数说明: 同步整流,内置150mΩ/80mΩ MOSFETs ,支持2A持续导通电流。 轻载调频模式,超高轻载效率 展频技术优化EMC 固定软启动:5ms 峰值电流控制模式,内置补偿网络 固定500KHz频率,Fixed 500kHz SOT23-6 封装 |
2.2 线性稳压LDO
线性稳压相对于降压型DCDC变换器而言,其输出纹波会更小,噪声会更少,有利于扫地机器人系统中的处理器,MCU,还有部分传感器的稳定运行,适合用于第一级降压电路。 因此,在输入输出压差不大的情况下,LDO是电源管理方案的优选。TI提供业内最为广泛的LDO产品。在不同的输入输出电压,电流,封装,压差,静态电流,功耗,噪声指标下,TI都能提供高性价比的方案。
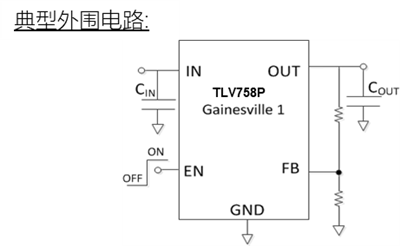
我们以TLV758P为例子说明:
|
TLV758P关键参数说明: 输入电压范围: 1.5V – 6.0V 输出电压范围: 0.55V – 5.5V (可调) 输出电压精度: 1% (max) @ 85C 压差: 125mV (max) at 500mA (3.3Vout) 静态电流: 25uA (typ) 共模抑制比PSRR: 50dB @ 100kHz 输入浪涌电流抑制 过流保护 输出电容主动放电 封装: 2x2 DFN-6 |
|
更多方案选型,可通过以下方式查询: TI官网LDO选型网站 LDO快速查询指南 |
第三节 电机驱动
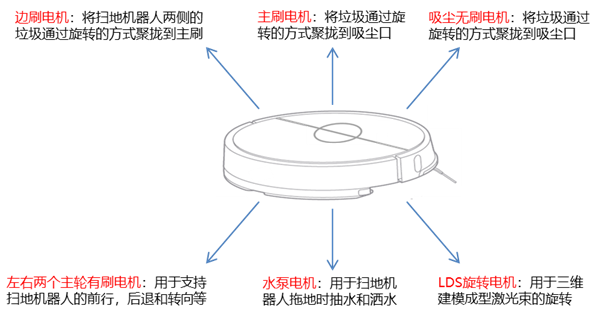
典型的扫地机器人产品中有非常多需要用到电机驱动的场合,如: 左右轮子,主刷,边刷,水泵,吸尘电机,LDS旋转座等。 TI针对不同的电机类型以及负载大小有非常全面的产品目录可供选择。
以主轮驱动应用为例说明:
主轮的电机通常为12V的直流有刷电机。 承担的前转,后转,里程记录,堵转检测等功能。TI的DRV8870有刷电机驱动产品,配合TI超高性价比运放TLV9061,可以完美实现以上所有功能。TI同时还提供实现该功能的参考设计TIDA-01588, 通过注册官网myTI,可以免费浏览,下载该参考设计的设计文档,原理图,测试文档等源文件。
该参考设计基本架构如下所示:
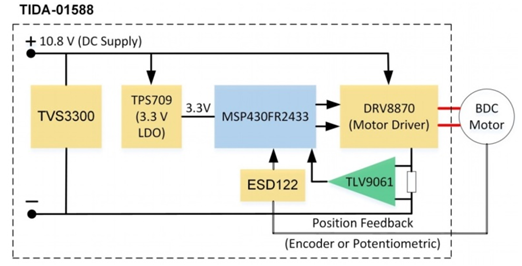
如图所示,系统电源为10.8V DC,跨接一个TVS保护,通过DRV8870来驱动有刷电机BDC。10.8V DC经过LDO线性稳压器TPS709给微控制器MSP430FR2433供电,微控制器给DRV8870发出指令控制电机,实现扫地机器人主轮的正转,反转,刹车,空挡滑行等功能。同时DRV8870通过外置采样电阻,结合运放TLV9061进行电流检测,实现堵转检测等功能。位于电机上的光电计数器或者霍尔传感器信号通过ESD接口芯片ESD122反馈到微控制器,可以实现电机测试历程记录等功能。
|
DRV8870参数说明: 6.5V – 45V输入电压范围, 3.6A峰值电流输出能力 内置H桥NMOS PWM控制信号输入 HSOP 8-pin封装 支持给类保护机制: 1) 输入欠压锁定 2) Charge pump欠压保护,过流保护和过温保护 3) 故障自动重启 |
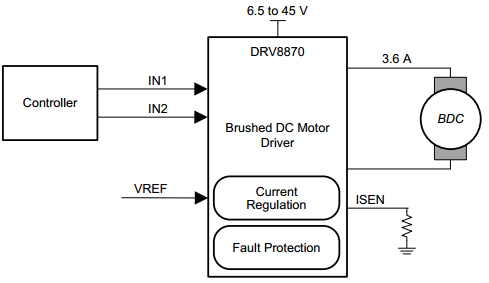
更多详情,请参阅DRV8870数据手册。
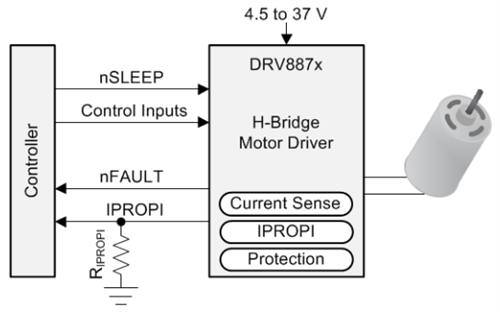
除了该参考设计中所推荐的DRV8870外,TI还有以下具有特色的方案值得推荐:DRV8876。以下是款产品的介绍: DRV8876是一款高集成度 H桥驱动器,内置N-MOSFET,charge pump,电流采样转换,以及各类保护电路。非常适合用于扫地机器人的主轮驱动,或者主刷驱动。DRV8876最大的亮点在于超高集成度,通过内置采样电路和信号调理,实现堵转检测。与传统的驱动方案(如DRV8870)相比,可以节省设计者的一颗功率采样电阻,以及一颗堵转检测的运放。
另外,DRV8876可以通过设置睡眠模式来保持超低的待机功耗(<1uA),以保证扫地机器人电池能最大限度节能。
|
DRV8876参数说明: 4.5V – 37V输入电压范围, 3.5A峰值电流输出能力 内置电流采样电路,无需外置功率电阻 电流信号反馈输出功能,无需外置运放 展频技术优化EMI性能 支持1.8V,3.3V, 5V电平控制信号 支持给类保护机制: 1) 输入欠压锁定 2) Charge pump欠压保护 3) 过流保护 |
更多详情,请参阅DRV8846数据手册。
更多TI电机驱动的产品,可以在官网中获得:http://www.ti.com/motor-drivers/overview.html
第四节 传感器及信号调理
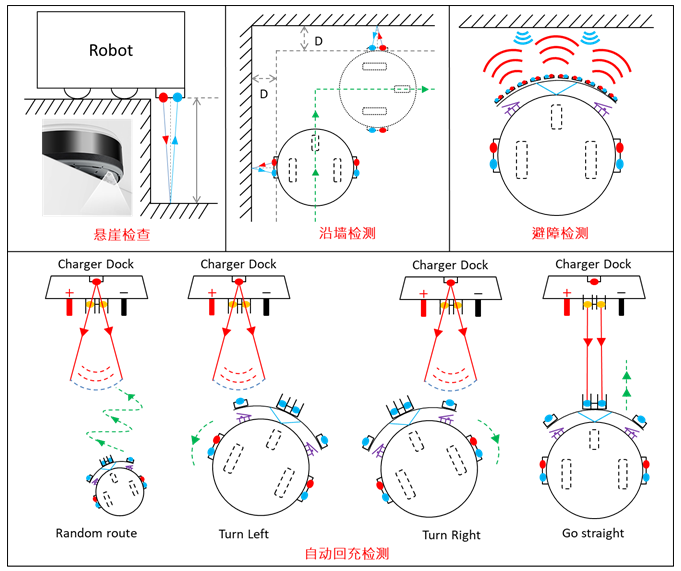
扫地机器人作为智能化的小家电产品,传感器是其最核心的零部件之一。典型需要传感器实现的功能包括有:避障传感,沿墙传感,悬崖检测,虚拟墙检测,碰撞传感,里程检测,自动回充检测,视觉传感及导航等。除此之外,不同产品根据不同功能也会有不一样的传感器需求,如尘盒/水箱检测,车轮异常检测等。
TI提供以下几类传感器实现以上功能:
4.1 霍尔传感器
霍尔传感器可用于实现车轮里程计,虚拟墙检测,如尘盒/水箱检测,车轮异常检测等功能。
TI的霍尔传感器有以下特点:
1) 宽泛的输入耐压(1.65V-38V)确保通用性,可靠性;
2) 超低待机功耗(<1uA)利于电池设备延长使用时长;
3) 多种带宽可选(5Hz, 20Hz, 160Hz, 2KHz, 30KHz)
4) 多种封装可选(SOT-23, TO-92,X2SON)
4.2 1D TOF
1D ToF可用于避障传感,悬崖检测,视觉传感及导航等功能。以下简单介绍TI 1D TOF器件OPT3101的基本工作原理以及在扫地机器人上的应用。
1) OPT3101基本工作原理以及优点
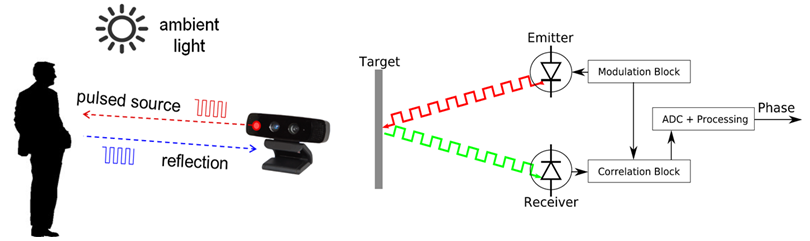
ToF (Time of Flight) 全称时间飞行传感器。ToF 核心系统是由光发射器 (激光,LED 和IR 等)和光接收器 (光电二极管)组成。发射器的调制信号经物体反射后,部分地回到接收器。通过测量发射光信号和接收光信号之间的相位差信息可以获得被测物体深度(距离) 信息,进而实现长距离接近感应和距离测量等功能。
2) TI的ToF传感器 OPT3101具有如下特性和优点
远距离测距、障碍检测和躲避,15 米不模糊的范围内具有16 位距离输出,可通过去混叠技术扩展距离范围
多种光电二极管和发射极的灵活定制设计 (宽波长范围)
高达4kHz 的采样率
出色的环境光和阳光抑制性能 (室外和室内),不依赖于物体颜色和反射率的测距
自适应HDR 节省功耗并提高动态范围
支持3 个发射器通道,满足多区域操作需求
集成照明驱动器,具有高达173mA 的可编程电流控制能力
3) OPT3101在扫地机器人中的应用
利用OPT3101抗干扰性能强,精度高的特点。非常适合在扫地机器人中实现主避障检测功能。与传统红外的方式对比,可以实现精确距离信号的检测,一致性更好,抗光强干扰能力更好。
利用OPT3101不受物体颜色的影响,可以实现更加可靠的悬崖检测:
利用OPT3101的特性,还可以构成旋转ToF激光雷达传感器,实现二维平面360度全方位激光测距,并产生所在空间的平面点云地图信息,配合SLAM算法,可以实现精确的地图构建,定位导航等功能。关于该功能实现更多细节请联系当地TI销售代表以及技术支持。
4.3 通用运算放大器TLV900X系列
除传感器本体外,TI提供了传感器后级的信号调理方案。 扫地机器人应用中典型的需求是通用运算放大器。 常见场合是用于电机电流采样,电池充电采样,电池包温度信号调理,红外传感器信号调理等。TI提供的通用运放类型产品可以完全覆盖以上应用场合。以下产品介绍为目前TI主推的高性价比通用运放TLV900X。
TLV900x是适用于成本敏感型系统的低功耗、轨对轨输入输出、1MHz 通用运算放大器。TLV900x 系列包括单通道 (TLV9001)、双通道(TLV9002)、 和四通道 (TLV9004) 低电压(1.8V 至5.5V)运算放大器。具有以下特性:
1) 轨至轨输入和输出
2) 低输入失调电压:±0.4mV
3) 单位增益带宽:1MHz
4) 由于具有电阻式开环输出阻抗,因此可在更高的电容负载 (100pF)下更轻松地实现稳定
5) 低宽带噪声:27nV/√Hz @ 1kHz
6) 低输入偏置电流:5pA
7) 低静态电流:60µA/通道
8) 可在电源电压低至 1.8V 的电压下运行
9) 内部射频干扰 (RFI) 和电磁干扰 (EMI) 滤波器
10) 扩展温度范围:–40°C 至 +125°C
以上便是通用运放TLV900X的基本简介,更多细节,请参阅TLV900X数据手册。除此之外,对于带宽要求更高,摆率要求更高的场合,我们还有TLV906X(带宽10MHz), TLV905X(摆率15V/us)等系列产品供选择。
第五节、人机交互界面
丰富的人机交互功能可以给扫地机器人产品带来更好的用户体验和产品附加值。TI在该领域提供诸多解决方案: LED显示,电容触摸,语音功放,无线连接等等。接下来以LED显示以及电容触摸方案为代表介绍。
5.1 LED显示
TI的LED产品覆盖多样的应用场景,包括: 指示灯背光驱动,LED数码管显示驱动,以及呼吸/跑马灯。 对于扫地机器人产品而言,LED灯通常用于状态指示,用户可以根据不同的产品需求,选择不同类型的显示方式。TI LED驱动芯片带来的优点包括:1) 节约MCU I/O口。2) 恒流驱动,高效可靠。3)无需大量软件资源即能实现特殊灯效。 以下为TI LED产品在扫地机器人应用中的大致分类和推荐:
| LED指示灯 | 断码式LED数码管 | 呼吸灯,环形灯 | |||
| 接口 | SPI | I2C | SPI | SPI | I2C |
| 指标 | 多通道数输出恒流驱动 | 40V耐压,多通道数输出恒流驱动 | 多通道数输出恒流驱动 | 高分辨率亮度控制 | |
| 多通道数 | 内置驱动引擎 | ||||
| 建议 |
TLC5928X TLC5947 TLC595X |
TLC6C598 TLC6C5912 |
TLC5928X TLC595X |
TLC5947 (24CH) TLC595X (48CH) |
LP55231 LP5569 LP50XX |
| 典型应用场景 | 背光灯显示 | ||||

数码管显示 |
呼吸灯,跑马灯,渐变灯,环形/条形等效果 |
|||
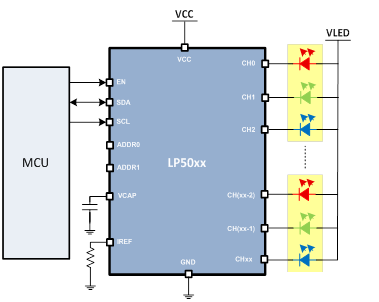
以LP50XX系列产品举例说明:LP50XX系列是TI全新一代RGB三色灯驱动,可以在占用MCU极少资源的情况下,实现多个通道RGB三色灯的控制,实现精准恒流,亮暗,颜色变化,以及图案组合等效果。该产品实现的灯效能给扫地机器人带来与众不同的人机交互体验。其开发的简易程度,也有利于产品快速上市。
|
LP50XX参数: 支持多种通道数选型:36/30/24/18/12/9-Ch VCC 范围: 2.7V to 5.5V 恒流控制,全电压范围内每个通道最大25.5mA,当VCC大于3.3V时可达35mA; 超低关断电流1uA (Max.),低待机功耗10uA(Typ.) 每个通道集成12bit, 29KHz PWM发生器 独立通道颜色配置寄存器 独立通道亮度控制寄存器 3个可编程RGB库方便软件编写 可支持4颗器件级联 支持高达400KHz快速I2C模式 |
更多详细信息可以查看LP50XX规格书, 更多LED选型可以查看TI官网: LED选型。
5.2 MSP430 Captivate MCU
MSP430 captivate系列MCU是TI最新一代基于电容式的触摸方案。 有如下几个特点:
1) 可靠性: 芯片通过IEC61000-4-X认证,可以有效地抵抗噪声,防止误触发;
2) 通用性:该方案可用于各类材料面板的触摸(玻璃,塑料,金属),还能够实现简单的手势识别,接近感应以及液位检测。
3) 低功耗:TI Captivate MCU沿袭了TI MCU一贯的超低待机功耗特性,非常适合电池式产品如扫地机器人。
4) 高分辨率: 超高分辨率,有利于实现滑条,滚轮等触摸效果。
5) 简易开发: TI提供完整的图形化编程界面,只需要5分钟即可实现自定义设计。
以MSP430FR2522产品举例说明:
MSP430FR2522的主要参数指标如下所示:
1) 15个I/O口,其中8个I/O可用于电容感应。
2) 频率最高支持16Mhz,7KB FRAM存储空间。
3) 内置8个10bit ADC。
4) 超低待机功耗:正常运行(120uA/MHz),待机模式(<4uA),关断模式(36nA)。
5) VQFN,TSSOP封装可选。
5.3 TI参考设计
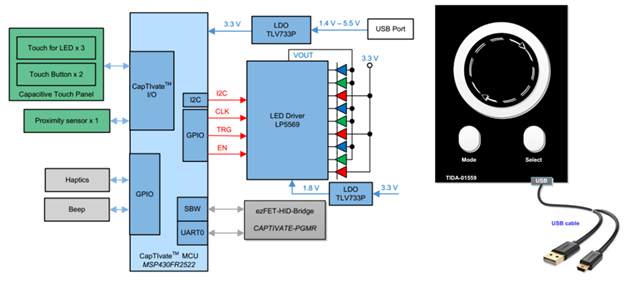
针对如上所提两种人机交互功能,TI整合并定制了一款参考设计TIDA-01559。它采用了 MSP430FR2522 MCU 和 LP5569 LED 驱动器,可通过 LED 引擎控制实现极低的待机功耗并减少 MCU 的负载资源。该解决方案可应用于需要具有出色 EMI 性能和抗湿性能的低功耗 HMI 的应用中,该设计可应用与扫地机器人产品中。
该参考设计的系统框图和实物图如下方所示,可实现功能包括:
1) 利用MSP430FR2522实现玻璃/塑料面板触摸按键,以及接近唤醒。
2) 利用LP5569实现RGB三色灯环的特殊效果(呼吸,闪烁,渐变等)
3) 利用LP5569配合MSP430FR2522实现LED闪烁与手触摸成随动效果。
审核编辑:郭婷
-
扫地机器人EMC方案2023-02-08 25615
-
TLV9062在扫地机器人的应用2022-11-11 1114
-
扫地机器人系统的解决方案分享2022-11-10 1208
-
扫地机器人面临的设计挑战有哪些2022-11-09 1003
-
德州仪器针对扫地机器人系统的解决方案2022-11-01 767
-
扫地机器人自动回充的技术原理是什么2021-09-14 5590
-
如何选择好的扫地机器人2018-08-20 4600
-
智能扫地机器人解决方案2017-05-27 8798
-
扫地机器人怎么制作2017-01-12 7845
-
原来扫地机器人是这样工作的!2015-12-24 31554
-
【NanoPi2申请】扫地机器人2015-12-02 3599
-
扫地机器人方案2015-05-18 10613
-
扫地机器人如何选购?2015-01-21 7846
-
扫地机器人十大排名!了解扫地机器人哪个牌子好2015-01-20 10622
全部0条评论

快来发表一下你的评论吧 !
