

新手学习FOC的误区
描述
作者简介:
从事三相异步电机和永磁同步电机的控制开发工作十余年,精通无感FOC控制。涉及产品包括变频器,伺服,电动工具,吸尘器,螺旋桨,无人机,空压机等。功率范围包括100W~100kW,电压范围包括14VDC~660VAC。
从2020年开始在知乎和公众号做技术分享,一贯的理念是尊重知识,尊重劳动,尊重版权,持续性输出价值。期待所有同行获得足够的报酬,越来越多人愿意从事电机控制行业。
在和读者朋友们的交流中,有很多朋友学习FOC往往有一些误区。
有些朋友是从方波过渡到FOC,有些是学习了FOC好几年,进步很慢。各种误区让大家陷入了瓶颈,久久走不出来。
通过这篇文章,把相关的一些经验整理出来,供大家参考,希望能帮助到各位少走弯路。
1、把SVPWM当成算法
很多初学者,或者从方波转FOC的工程师,老是咨询FOC是如何换向的?FOC的6个管子是怎么开关的?用到了什么算法?
SVPWM对于FOC是很重要的,具有较高的电压利用率,谐波小。但是SVPWM并不是一类算法,而是一种DC-AC逆变的手段,更归属于电力电子的范畴。
看FOC的整体框图:
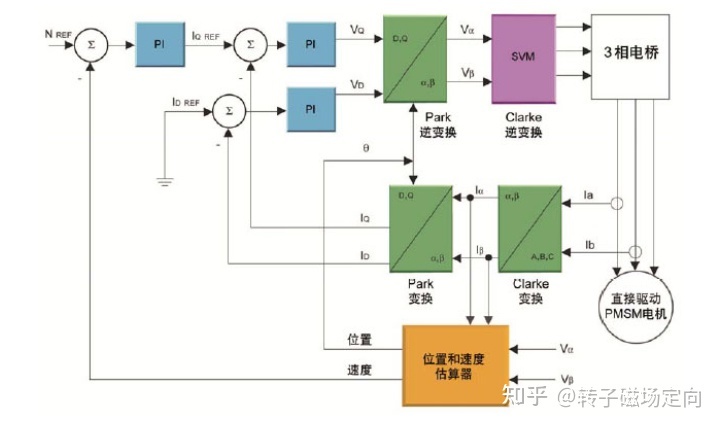
FOC框图
SVPWM输入是alpha和beta轴电压,输出是三相PWM占空比。通俗的说,SVPWM可以当作一个理想电压源,控制逆变器实现对参考电压的输出。我的习惯,SVPWM就当作一个黑盒子,按照电流环的输出作为输入指令,输出PWM比较值。
基本上市面上的产品以七段式SVPWM为主,除了过调制那部分,其他部分基本是一致的。所以SVPWM并不是FOC最核心的东西,主要精力或者重点应该放在观测器和环路上。
至于换向,因为SVPWM的上下桥是加入死区后互补式的开关逻辑,并不像方波控制,可能出现长时间上下桥都不开的情况,所以FOC并没有换向这个说法,就是逆变器开关管导通或者续流二极管续流,这样子电流是连续的。
2、把PI当成算法
很多新手习惯把PI当成算法。
严格的来说,PI调节器是个滤波器或者按照《自动控制原理》的理论,是一个校正环节。比如,以电流环为例:
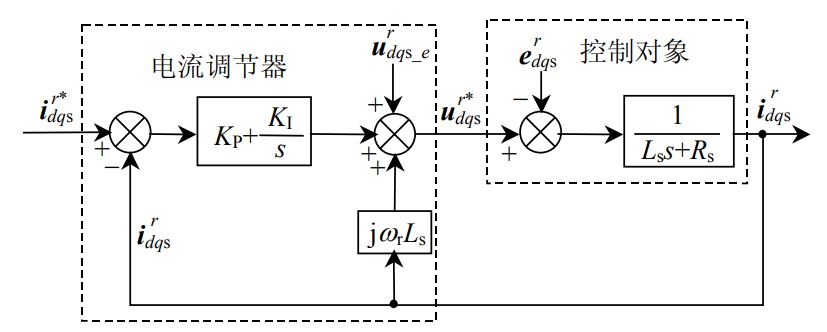
从上图可以看出,PI调节器串联在电流环的回路里,通过合理的配置参数,实现对传递函数的降阶,最后电流环等效成了一个低通滤波器。
总体来说,PI更多是带宽的整定,算不上多么高深的算法,主要精力还是放在位置估算之类的观测器上。
3、不重视MATLAB
很多工作很多年的工程师很反感使用MATLAB,觉得自己电机转的挺好的,写写代码调调参数电机就转起来了。当然搞了十几年还是只会个SMO+PLL。
在开发新的方法,或者环路分析对比,参数敏感性分析,MTPA分析,Simulink是非常好用的方法。
结合我个人的经历来看,如果不坚持使用MATLAB,那么绝对会陷入到调参数的瓶颈中,很难进步。
4、纠结于代码和资料
很多人一上来就问,有没有代码卖?有没有资料卖?
其实电机控制的核心真的不是代码,代码只能辅助你入门。要提高,关键是得掌握FOC开发的一套流程或者方法,补充理论基础,做仿真,做实验。买来的代码如果基本功不够,根本领会不到代码的核心思想,关键问题还是要打好基本功。
现在浮躁的风气很严重,要么想着转互联网拿高薪,要么想拿到代码快速把电机转起来。
假设能买到不错的代码,把项目做成了。现在技术都是不断革新的,下一代产品如何开发呢?存在的问题如何优化升级呢?就靠无脑调参数吗?
这个东西就跟郭靖练降龙十八掌一样,如果他没跟江南七怪傻乎乎练了十几年的基本功,只怕早就走火入魔了。学技术跟学功夫一样,要走正路,坚持科学的方法打好基础。走邪路求快只会走火入魔。
资料也一样,其实我学习用的资料不多,就是四本基础教材。《电机学》,《电力拖动自动控制系统》,《自动控制原理》,《电力电子技术》。在看书的基础上,再看一些IEEE文献和知网文章。这些东西都是开源的,但是很多人想着买点资料一步登天。
很多网上的资料,编写者都是站在自己的角度总结的,你没有经历当时项目的具体问题,是很难体会到资料总结的精髓。这个就跟练功一样,洪七公说过,贪多嚼不烂。杨过练了一大把神功,但是每样都不精。直到自己苦练18年原创出了黯然销魂掌才真正步入顶尖高手的行列。
不用贪图网上的资料,打好基本功,自己用心去做几个项目用心总结,付出时间和汗水获得的东西才是别人拿不走,复制不了的。
5、把电机当成RL
有的工程师分析电机低速性能,比如低速用高频注入,有人说高频注入会影响电流上升速度。我说不会影响。因为在电压足够用情况下,低速下电流上升的速度取决于电流环的带宽,带宽高,电流上升快。
但是这名工程师振振有词,说低速下,高频注入占用了一部分电压,然后定子电阻的压降在同样电流下相同,这样子用了高频注入导致电感上的电压小了,电压除以电感变小了,导致电流上升率就小了。。。。
当时我看了这个回答真的是内流满面。。。。完全是按照方波的思路在分析?完完全全把电机当成RL负载啊。
就以这个问题为例,我来解读如下:
5.1,电机除了RL最重要的就是反电势,在高速或者动态下,反电势的占比是很大的。在分析动态情况下,千万不能忽略反电势的影响。电机绝对不是RL啊,没有反电势那磁场干什么用?磁场不起作用哪来的转矩啊?这是基本的电机模型都没弄明白。。。要加强基础啊!
5.2,即使电压除以电感导致电流上升率低了,就一定导致电流上升慢?电流除了幅值就没有相位吗?转矩是q轴电流产生,你能保证就恰好导致q轴电流上升慢,而不是d轴?电压和电流就没有相位,上来除了就是能产生结论?
5.3,电机是个非线性的模型,尤其在FOC控制里,电流,速度,转矩,这些控制量都是用环路来实现的。那么分析这些对象要有环路的概念,环路决定了上升速度,过冲,稳态误差等等各种关键指标。这些东西不都是《自动控制原理》上的白纸黑字吗?加强基础啊。
5.4,这个问题用simulink仿真对比一下不就知道了吗?就是不愿意用。。。
6、以为滑模或者龙伯格就是万能的
很多初学者做低压电机控制出身,看一些芯片公司的文档入门。这个行业用的最多的就是滑模或者龙伯格,然后就觉得这个方法是万能的,是无敌的。。。
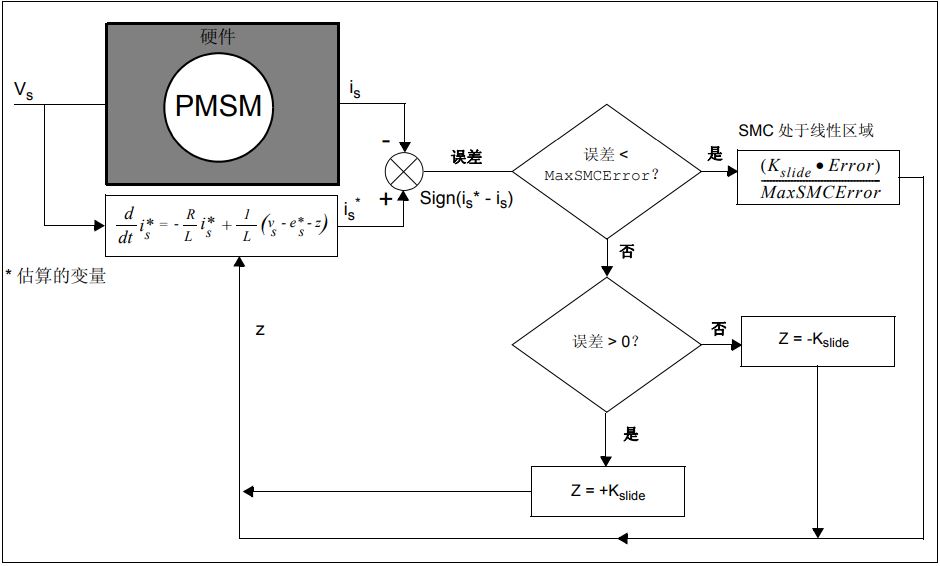
SMO框图
PMSM/BLDC的无感FOC方法,总体有三大类:
分别是基于凸极性的高频注入,基于磁链的模型,基于反电势的模型。其中滑模或者龙伯格仅仅只是基于反电势模型里的两种方法,而且这两种方法缺陷也很明显。低速没有带载能力,这是基于反电势模型的通病。
就算是基于反电势模型的方法,还有基于不同坐标系的拓展反电势或者其他衍生的方法。
思路要开阔一些,除了滑模还有很多种方法,尤其是不同于工况或者需求要进行调整。
而且龙伯格不适合无感FOC,其最优应用场景是电动汽车或者伺服,在知道角度的前提下进行速度估算,这样子其速度是没有相位滞后的,很适合高性能场合,鲁棒性好。
7、不重视理论基础
除了以上问题,还有一点就是不愿意看书,不愿意夯实理论基础。
比如,很多人对带宽不了解,对Z变换不愿意学习,这是《自动控制原理》上的基础。
调速范围不了解,很多工作十几年的工程师都不知道什么是调速范围。调速比是最能反应高低速带载极限的,比如24V/50Hz的电机1Hz带满载,和24V/500Hz的电机实现1Hz带满载,这难度能一样吗
很多人就问,最低几Hz带满载?上述两个电机都是1Hz带满载的话,他们的低速带载极限是一样的吗?
我的建议就是踏踏实实,花个一年时间好好打牢基础,再去考虑其他的事情。建摩天大楼的前几年都是在地下默默努力,打好了地基几天就是一楼层啊。
8、不重视采样触发点和PWM生效机制
这一点是很多工程师容易忽视的,PWM计数器一般是up-down模式。
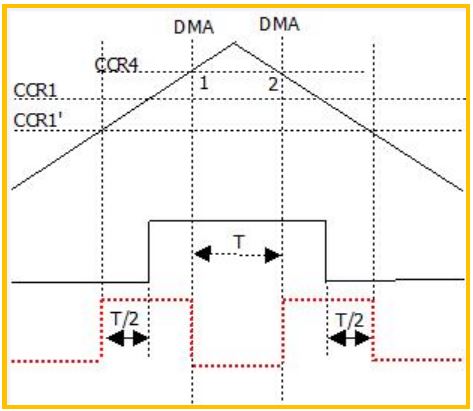
PWM采样点配置
在三角波的顶点还是底点采样?采样值在什么时候更新?
中断在什么时候计算结束?PWM比较值在什么时候更新?
双电阻和单电阻,在采样配置,PWM比较值生效有什么区别?
在高开关频率下,不同的PWM比较值生效机制,对角度估算有什么影响?
以上问题,因为离散采样和计算造成对实际的估算结果有些影响,并不是算法层面造成的,属于硬件级的问题。如果不考虑清楚,在高速电机或者单电阻采样上会有问题,或者增大估算误差。
最后的话
以上就是我总结的一些FOC学习的误区,欢迎大家留言补充。
审核编辑 黄宇
-
新手福音:概述学习FPGA的一些常见误区2013-09-27 8623
-
51单片机新手实例学习2011-05-24 4602
-
嵌入式系统的知识学习及误区2011-11-03 2280
-
FPGA学习的一些误区2012-08-12 2469
-
工程师手记:FPGA学习的四大误区2012-08-17 12465
-
新手学习PADS的三个误区2018-07-30 7540
-
有感FOC算法学习与实现总结2021-07-05 2873
-
FOC学习记录2021-08-17 1888
-
关于FOC的知识学习2021-08-27 1743
-
【老手经验】FOC电机控制究竟该如何学习?2021-09-01 4422
-
pcb layout学习中用Allegro几个误区2011-11-23 4845
-
10个常见的_Android_新手误区2017-03-19 564
-
新手Linux内核学习起步2017-10-27 999
-
新手学习单片机最常见的六大误区!2024-03-28 2329
-
操作误区警示:发动机气密性检测仪新手易犯错误-岳信仪器2025-09-13 766
全部0条评论

快来发表一下你的评论吧 !
