

基于YOLOv7的关键点模型测评
描述
【前言】
目前人体姿态估计总体分为Top-down和Bottom-up两种,与目标检测不同,无论是基于热力图或是基于检测器处理的关键点检测算法,都较为依赖计算资源,推理耗时略长,今年出现了以YOLO为基线的关键点检测器。玩过目标检测的童鞋都知道YOLO以及各种变种目前算是工业落地较多的一类检测器,其简单的设计思想,长期活跃的社区生态,使其始终占据着较高的话题度。
【演变】
在ECCV 2022和CVPRW 2022会议上,YoLo-Pose和KaPao(下称为yolo-like-pose)都基于流行的YOLO目标检测框架提出一种新颖的无热力图的方法,类似于很久以前谷歌使用回归计算关键点的思想,yolo-like-pose一不使用检测器进行二阶处理,二部使用热力图拼接,虽然是一种暴力回归关键点的检测算法,但在处理速度上具有一定优势。
kapao
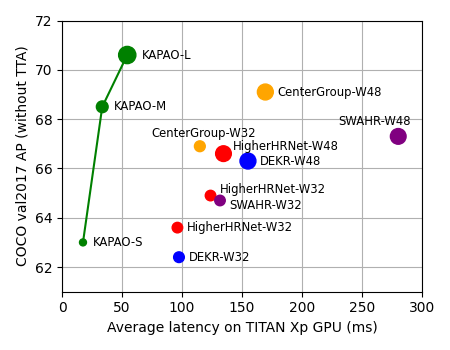
去年11月,滑铁卢大学率先提出了 KaPao:Rethinking Keypoint Representations: Modeling Keypoints and Poses as Objects for Multi-Person Human Pose Estimation,基于YOLOv5进行关键点检测,该文章目前已被ECCV 2022接收,该算法所取得的性能如下:
paper:https://arxiv.org/abs/2111.08557 code:https://github.com/wmcnally/kapao
yolov5-pose
今年4月,yolo-pose也挂在了arvix,在论文中,通过调研发现 HeatMap 的方式普遍使用L1 Loss。然而,L1损失并不一定适合获得最佳的OKS。且由于HeatMap是概率图,因此在基于纯HeatMap的方法中不可能使用OKS作为loss,只有当回归到关键点位置时,OKS才能被用作损失函数。因此,yolo-pose使用oks loss作为关键点的损失
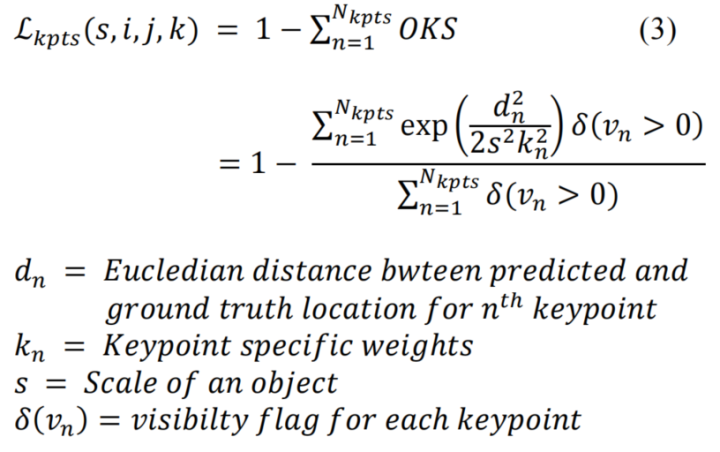
相关代码在https://github.com/TexasInstruments/edgeai-yolov5/blob/yolo-pose/utils/loss.py也可见到:
if self.kpt_label: #Direct kpt prediction pkpt_x = ps[:, 6::3] * 2. - 0.5 pkpt_y = ps[:, 7::3] * 2. - 0.5 pkpt_score = ps[:, 8::3] #mask kpt_mask = (tkpt[i][:, 0::2] != 0) lkptv += self.BCEcls(pkpt_score, kpt_mask.float()) #l2 distance based loss #lkpt += (((pkpt-tkpt[i])*kpt_mask)**2).mean() #Try to make this loss based on distance instead of ordinary difference #oks based loss d = (pkpt_x-tkpt[i][:,0::2])**2 + (pkpt_y-tkpt[i][:,1::2])**2 s = torch.prod(tbox[i][:,-2:], dim=1, keepdim=True) kpt_loss_factor = (torch.sum(kpt_mask != 0) + torch.sum(kpt_mask == 0))/torch.sum(kpt_mask != 0) lkpt += kpt_loss_factor*((1 - torch.exp(-d/(s*(4*sigmas**2)+1e-9)))*kpt_mask).mean()
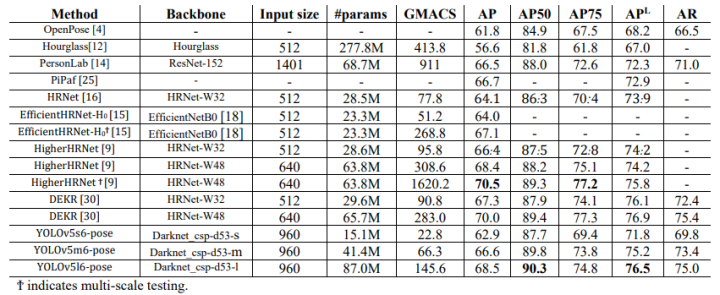
相关性能如下:
yolov7-pose
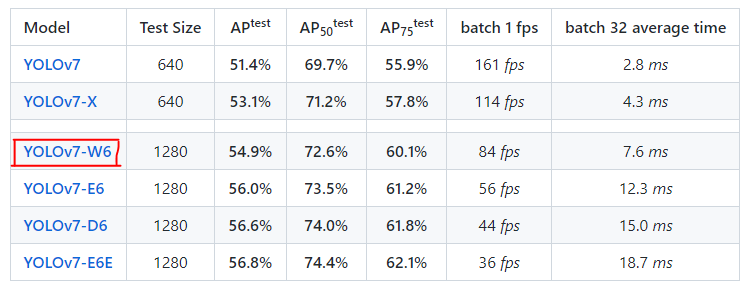
上个星期,YOLOv7的作者也放出了关于人体关键点检测的模型,该模型基于YOLOv7-w6,
目前作者提供了.pt文件和推理测试的脚本,有兴趣的童靴可以去看看,本文的重点更偏向于对yolov7-pose.pt进行onnx文件的抽取和推理。
【yolov7-pose + onnxruntime】
首先下载好官方的预训练模型,使用提供的脚本进行推理:
% weigths = torch.load('weights/yolov7-w6-pose.pt') % image = cv2.imread('sample/pose.jpeg') !python pose.py

一、yolov7-w6 VS yolov7-w6-pose
-
首先看下yolov7-w6使用的检测头
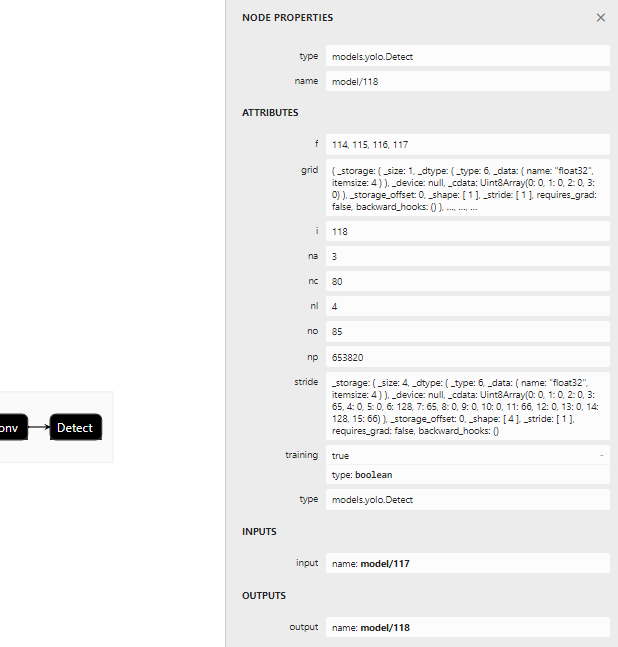
- 表示一共有四组不同尺度的检测头,分别为15×15,30×30,60×60,120×120,对应输出的节点为114,115,116,117
- nc对应coco的80个类别
- no表示
- 再看看yolov7-w6-pose使用的检测头:
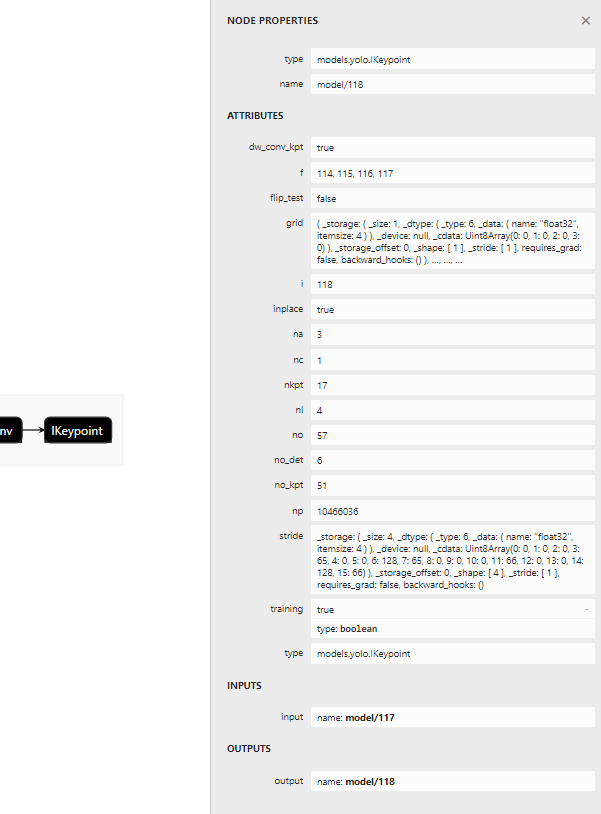 上述重复的地方不累述,讲几个点:
上述重复的地方不累述,讲几个点:- 代表person一个类别
- nkpt表示人体的17个关键点
# 原代码: for k, m in model.named_modules(): m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility if isinstance(m, models.common.Conv): # assign export-friendly activations if isinstance(m.act, nn.Hardswish): m.act = Hardswish() elif isinstance(m.act, nn.SiLU): m.act = SiLU() model.model[-1].export = not opt.grid # set Detect() layer grid export # 修改代码: for k, m in model.named_modules(): m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility if isinstance(m, models.common.Conv): # assign export-friendly activations if isinstance(m.act, nn.Hardswish): m.act = Hardswish() elif isinstance(m.act, nn.SiLU): m.act = SiLU() elif isinstance(m, models.yolo.IKeypoint): m.forward = m.forward_keypoint # assign forward (optional) # 此处切换检测头 model.model[-1].export = not opt.grid # set Detect() layer grid export forward_keypoint在原始的yolov7 repo源码中有,作者已经封装好,但估计是还没打算开放使用。使用以下命令进行抽取:
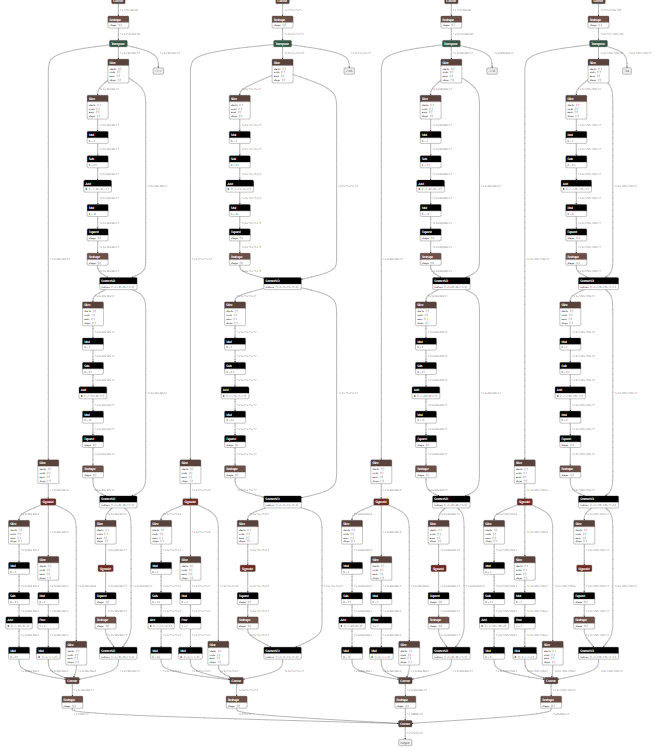
python export.py --weights 'weights/yolov7-w6-pose.pt' --img-size 960 --simplify True 抽取后的onnx检测头:
 三、onnxruntime推理onnxruntime推理代码:
三、onnxruntime推理onnxruntime推理代码:import onnxruntime import matplotlib.pyplot as plt import torch import cv2 from torchvision import transforms import numpy as np from utils.datasets import letterbox from utils.general import non_max_suppression_kpt from utils.plots import output_to_keypoint, plot_skeleton_kpts device = torch.device("cpu") image = cv2.imread('sample/pose.jpeg') image = letterbox(image, 960, stride=64, auto=True)[0] image_ = image.copy() image = transforms.ToTensor()(image) image = torch.tensor(np.array([image.numpy()])) print(image.shape) sess = onnxruntime.InferenceSession('weights/yolov7-w6-pose.onnx') out = sess.run(['output'], {'images': image.numpy()})[0] out = torch.from_numpy(out) output = non_max_suppression_kpt(out, 0.25, 0.65, nc=1, nkpt=17, kpt_label=True) output = output_to_keypoint(output) nimg = image[0].permute(1, 2, 0) * 255 nimg = nimg.cpu().numpy().astype(np.uint8) nimg = cv2.cvtColor(nimg, cv2.COLOR_RGB2BGR) for idx in range(output.shape[0]): plot_skeleton_kpts(nimg, output[idx, 7:].T, 3) # matplotlib inline plt.figure(figsize=(8, 8)) plt.axis('off') plt.imshow(nimg) plt.show() plt.savefig("tmp")
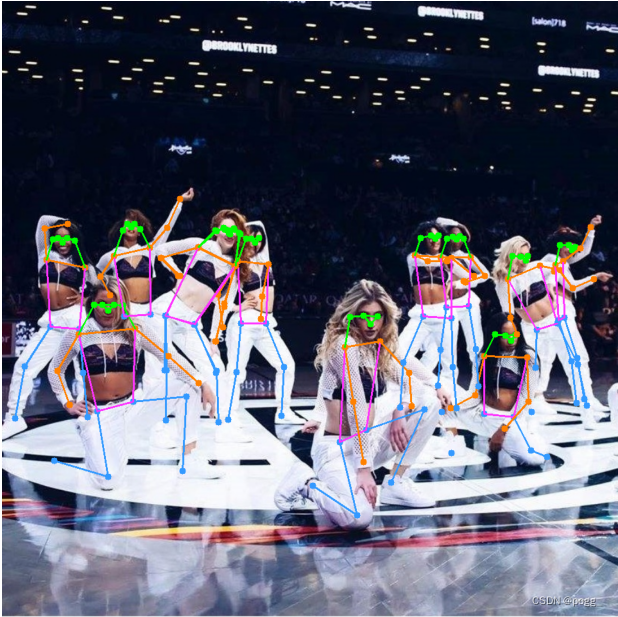 在这里插入图片描述推理效果几乎无损,但耗时会缩短一倍左右,另外有几个点:
在这里插入图片描述推理效果几乎无损,但耗时会缩短一倍左右,另外有几个点:- image = letterbox(image, 960, stride=64, auto=True)[0] 中stride指的是最大步长,yolov7-w6和yolov5s下采样多了一步,导致在8,16,32的基础上多了64的下采样步长
- output = non_max_suppression_kpt(out, 0.25, 0.65, nc=1, nkpt=17, kpt_label=True) ,nc 和 kpt_label 等信息在netron打印模型文件时可以看到
- 所得到的onnx相比原半精度模型大了将近三倍,后续排查原因
- yolov7-w6-pose极度吃显存,推理一张960×960的图像,需要2-4G的显存,训练更难以想象
审核编辑 :李倩
-
在英特尔AI开发板上用OpenVINO NNCF优化YOLOv72024-01-05 1976
-
YOLOV7网络架构解读2023-11-29 3406
-
详细解读YOLOV7网络架构设计2023-11-27 2006
-
使用OpenVINO优化并部署训练好的YOLOv7模型2023-08-25 3054
-
无法使用MYRIAD在OpenVINO trade中运行YOLOv7自定义模型怎么解决?2023-08-15 657
-
yolov5和YOLOX正负样本分配策略2023-08-14 5093
-
一文彻底搞懂YOLOv8【网络结构+代码+实操】2023-06-15 16923
-
在AI爱克斯开发板上用OpenVINO™加速YOLOv8-seg实例分割模型2023-06-05 2323
-
YOLOv7训练自己的数据集包括哪些2023-05-29 2536
-
AI爱克斯开发板上使用OpenVINO加速YOLOv8目标检测模型2023-05-26 3080
-
在AI爱克斯开发板上用OpenVINO™加速YOLOv8目标检测模型2023-05-12 2949
-
yolov7 onnx模型在NPU上太慢了怎么解决?2023-04-04 1209
-
深度解析YOLOv7的网络结构2022-09-14 9026
-
关于YOLOU中模型的测试2022-08-16 1880
全部0条评论

快来发表一下你的评论吧 !
