

使用C2000内部比较器替外部比较器
电子说
描述
使用C2000内部比较器替外部比较器
C2000系列芯片在数字电源和电机控制中有着广泛的应用,在这些应用中,过流过压保护是必不可少的。传统的方法是使用外部比较器,但是会存在滤波电路不好设计,不同版本需要不同的BOM来提供不同的保护点等问题。本文针对所有第三代C2000芯片,比如F2807x/37x,F28004x,F28002x等,介绍C2000内部比较器的具体实践方法,并提供了与传统的外部比较器方法的比较,结果表明,使用C2000内部比较器的方法在效率和成本上都具备明显的优势。
1. 介绍
C2000系列芯片在数字电源和电机控制中有着广泛的应用,在这些应用中,过流过压保护是必不可少的。传统的方法是使用外部比较器,但是会存在滤波电路不好设计,不同版本需要不同的BOM来提供不同的保护点等问题。本文针对所有第三代C2000芯片,比如F2807x/37x,F28004x,F28002x等,介绍C2000内部比较器的具体实践方法,并提供了与传统的外部比较器方法的比较,结果表明,使用C2000内部比较器的方法在效率和成本上都具备明显的优势。
2. C2000 内部比较器的介绍
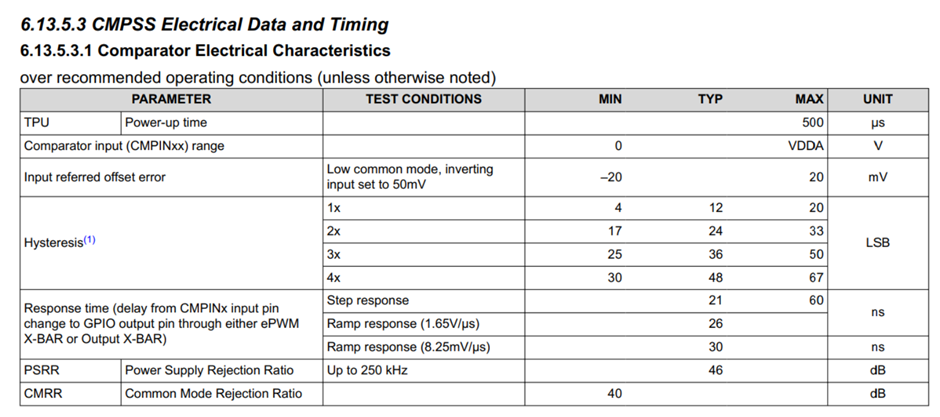
TI 第三代C2000芯片全系列集成了带DAC的片内比较器,通过DAC设定阈值,与采样信号分别送到片内比较器的正负输入端做比较,由于DAC的集成,用户可以方便地修改比较的电压值。同时,C2000比较器内部集成数字滤波器,可以实现高性能的滤波。生成保护信号给到PWM模块封锁PWM输出,从而实现快速的过流过压保护,无需额外再加比较器和基准电压。另外,C2000内部的比较器响应速度快,以F280049 为例(可参考datasheet上Comparator Electrical Characteristics这一章节),从比较器输入的电平异常到比较器产生输出信号,延迟最多60ns, 而通用比较器的延迟一般要1us左右,使用与C2000内部比较器相似规格的比较器成本又会比较高。
比较器子系统 (CMPSS) 模块由模拟比较器和支持组件组成它们组合成一种拓扑结构,可用于功率应用,例如峰值电流模式控制,开关电源、功率因数校正和电压跳闸监控。 每个CMPSS 模块包括两个模拟比较器、两个可编程 12 位DAC、一个斜坡发生器和两个数字滤波器。CMPSS有两个输出,一个是CTRIPH,送到芯片内部,可以和PWM模块同步,配合使用。一个是CTRIPOUTH,可以通过OUTPUTXBAR 送到外部GPIO和系统其他模块搭配使用。简化的示意图如图1所示:
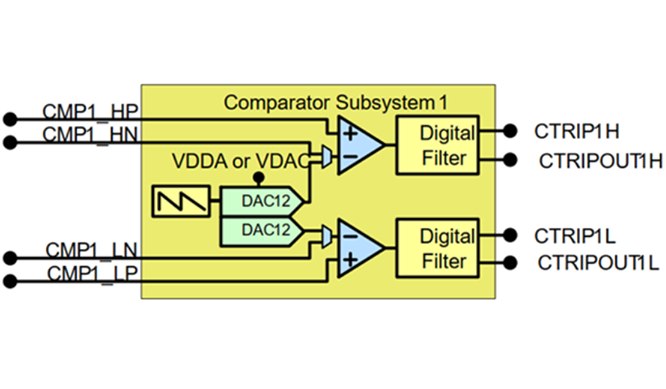
图1 比较器子系统 (CMPSS)简图
3. 比较器滞回功能的使用
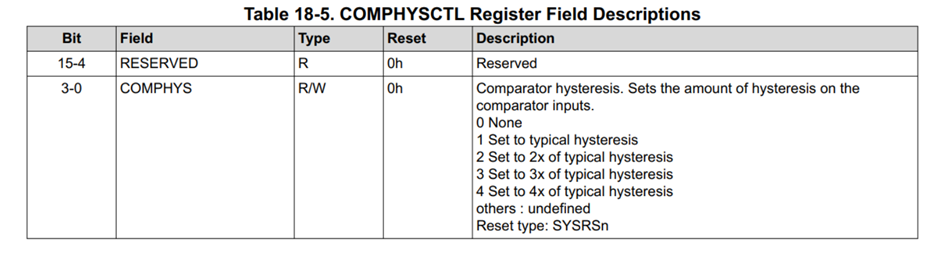
为了避免噪声波动引起的比较器输出的反复跳变,我们一般都会配置滞回比较。 C2000比较器的滞环是可以设定的,COMPHYSCTL的COMPHYS位可以设定滞环的环宽,当环宽设定为0时也就意味着没有滞环。注意在规格书中,滞环的单位是LSB,所以它和CMPSS模块内部的DAC的参考有关。如果内部DAC的参考电压是3V,1LSB对应3V/4096=0.7mV。 以F28004x,F2807x,F2837x为例,其滞环可以在12LSB, 24LSB, 36LSB, 48LSB中选择。具体可以在datasheet的电气参数中看到。
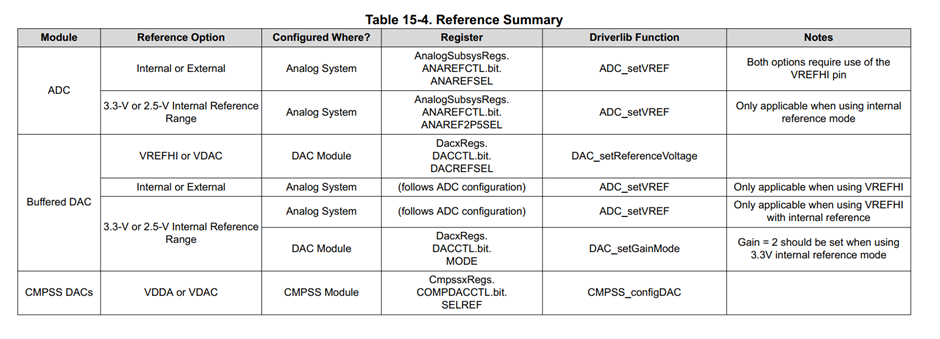
CMPSS内部DAC的参考可以看TRM (Technical Reference Manual) 中关于参考的介绍,可以在VDDA和VDAC中选择:
设置滞回的寄存器是COMPHYS, 设置滞回也可以调用driverlib中的函数CMPSS_setHysteresis(uint32_t base, uint16_t value)。设置值和滞回环宽的关系可以看具体型号C2000的Technical Reference Manual中寄存器的解释。
4. 数字滤波器的使用
当外部输入的滤波电路设计不当时,会导致比较器被误触发的情况,C2000内部比较器还集成了可配置的数字滤波器,CMPSS数字滤波器的时钟来源是系统时钟, 预分频(CLKPRESCALE)决定了滤波器的采样率,滤波器的FIFO在每个分频后时钟采样一次。数字滤波器在从输入端采集的FIFO采样(SAMPWIN)窗口上工作。滤波器输出为采样窗口内的多数值,其中多数由阈值(THRESH)定义。如果不满足阈值,则滤波器输出保持不变。具体的工作逻辑可以参考TRM(Technical Reference Manual)的Digital filter behavior,如图2。
这里以F280049为例,需要注意的是,THRESH的值必须被设置为大于SAMPWIN/2并且小于或等于SAMPWIN。同时,FIFO中的旧数据将被丢弃。在用寄存器配置的情况下,对于SAMPWIN、THRESH和CLKPRESCALE,数字滤波器使用的内部数字在所有情况下都是+1。也就是说,samples=SAMPWIN+1,threshold=THRESH+1,pre scale=CLKPRESCALE+1。
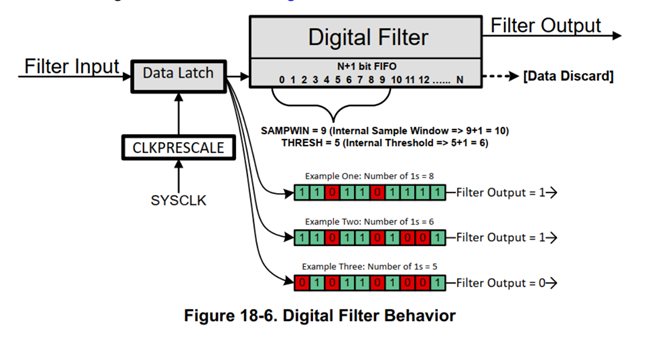
图2 比较器滤波子模块功能
也可以用driverlib函数配置,即在函数中配置相应的分频值,采样窗和阈值。
Void CMPSS_configFilterHigh(uint32_t base, uint16_t samplePrescale, uint16_t sampleWindow, uint16_t threshold);
Void CMPSS_configFilterLow(uint32_t base, uint16_t samplePrescale, uint16_t sampleWindow, uint16_t threshold);
5. 利用锁存模式和外部模块配合使用
CMPSS可以很方便地和PWM等其他内部外设配合使用,但是有些应用中,也需要把内部比较器的信号锁存起来,比如传给外部的IPM模块等。CMPSS也支持这种模式,用户可选择穿透模式,和锁存(Latch)模式,在锁存模式下,可以将瞬间的过压过流给到外部,保护外部的模块不被损坏。
同时,也可以在比较器的输出源中选择通过或门的锁存信号,也就是高低两个寄存器的COMPCTL.CTRIPOUTLSEL和用COMPCTL.CTRIPOUTHSEL ,第三个输入选项就是经过滤波器后的锁存信号,也可以选择0-异步模式或是和1-CPU时钟同步,或是2-经过滤波器但是不锁存的信号,具体选项和对应关系,可以参考图3。
同样的,也可以用Driverlib函数配置,在void CMPSS_configOutputsHigh(uint32_t base, uint16_t config)和void CMPSS_configOutputsLow(uint32_t base, uint16_t config)函数里面的config增加一个参数CMPSS_TRIPOUT_LATCH即可,TRIPOUT代表是将这个信号通过OUTPUTXBAR送到芯片外部GPIO。
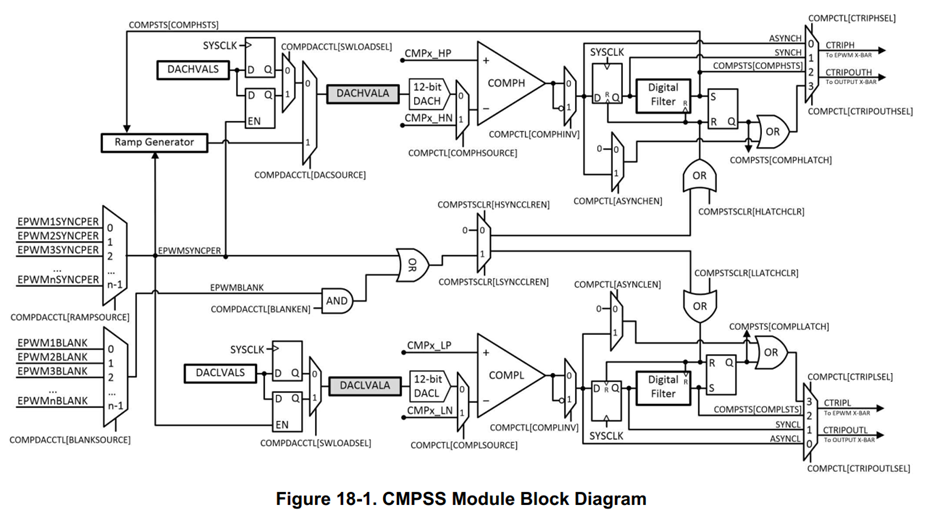
图3 比较器子系统完整信号框图
6. 和PWM配合使用的实际应用
传统的保护方式是使用外部比较器,本文介绍的使用C2000内部的窗口比较器(ADC与比较器pin 脚共用)的方式,可以节省物料成本和布板空间。具体配置方法如下(完整代码参考TIDM-02002 买电子元器件现货上唯样商城
针对 HEV/EV 车载充电器的双向 CLLLC 谐振、双有源电桥 (DAB) 参考设计):
第一步,选择合适的CMPSS输入的脚,查看TRM 的Table 15-2. Analog Pins and Internal Connections,并通过CMPSS的DAC 子模块,配置合适的值; 这边需要注意,比较器模块的高低比较器的Positive input必须是外部AIO引脚,negative input 可以说DAC 的输出或外部AIO引脚。
// set CMPSS H and L Positive input pins
ASysCtl_selectCMPHPMux(CLLLC_IPRIM_CMPSS_ASYSCTRL_CMPHPMUX,
CLLLC_IPRIM_CMPSS_ASYSCTRL_MUX_VALUE);
ASysCtl_selectCMPLPMux(CLLLC_IPRIM_CMPSS_ASYSCTRL_CMPLPMUX,
CLLLC_IPRIM_CMPSS_ASYSCTRL_MUX_VALUE);
// set DAC H and L values
CMPSS_setDACValueHigh(CLLLC_ISEC_TANK_CMPSS_BASE,
CLLLC_ISEC_TANK_DACHVAL);
CMPSS_setDACValueLow(CLLLC_ISEC_TANK_CMPSS_BASE,
CLLLC_ISEC_TANK_DACLVAL);
第二步,配置输出,通过XBAR 将CMPSS的高和低两个比较器的结果,映射到XBAR_TRIP5和XBAR_TRIP7;
XBAR_setEPWMMuxConfig(XBAR_TRIP5,
CLLLC_IPRIM_TANK_H_PWM_XBAR_MUX_VAL);
XBAR_enableEPWMMux(XBAR_TRIP5,
CLLLC_IPRIM_TANK_H_XBAR_MUX);
XBAR_setEPWMMuxConfig(XBAR_TRIP7,
CLLLC_IPRIM_TANK_L_PWM_XBAR_MUX_VAL);
XBAR_enableEPWMMux(XBAR_TRIP7,
CLLLC_IPRIM_TANK_L_XBAR_MUX);
第三步,PWM trip配置,将XBAR_TRIP5和XBAR_TRIP7分别配置给Digital Trip Event A2和B2, 当输出为高时,可以触发PWM动作。
7. 总结
在本文中,我们讨论了通过 C2000内部集成的模拟比较器功能,在增加系统功能的同时减少外部组件的需求,同时提供了更多的数字编程控制的灵活性,这种实现还可以帮助节省成本和电路板空间,本文还通过几个具体案例详细介绍了集成模拟比较器的使用方法。更多相关应用、硬件和软件的示例,请参阅 TI 官网提供的C2000开发工具、应用手册、设计指南、硬件原理图和软件示例。
参考文献
TMS320F28002x Real-Time Microcontrollers Technical Reference Manual (Rev. A)
TMS320F28004x Real-Time Microcontrollers Technical Reference Manual (Rev. D)
Design Guide: TIDM-02002 Bidirectional CLLLC Resonant Dual Active Bridge (DAB) Reference Design for HEV/EV Onboard Charger
来源:TI
作者:Emma Wang
松下汽车类6轴单芯片MEMS惯性传感器,提高车载系统的安全性和舒适性
据麦姆斯咨询介绍,在当下的“万物电气化(electrification of everything)”时代,传感器已成为一个必不可少的先决条件:汽车、巴士、摩托车、无人送货车、建筑机械和许多其它车辆配备越来越多的传感器,以实现安全且舒适的辅助驾驶/自动驾驶。全面的感知能力对于支持运动检测、定位、导航、数据融合等许多用途至关重要。
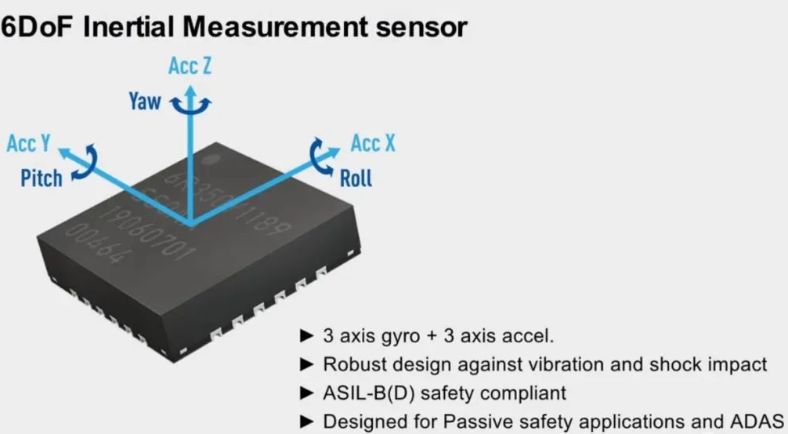
为此,松下机电(Panasonic Industry)开发出汽车类6轴MEMS惯性传感器系列,即MEMS惯性测量单元(IMU),该系列产品通过单芯片解决方案面向车载领域的功能安全(ISO26262)为车身稳定控制、ADAS和自动驾驶等系统提供惯性感知功能,并且符合ASIL-B(D)标准,具有高水平的功能安全性及自诊断功能。
松下汽车类6轴MEMS惯性传感器
过去用于车载系统的惯性传感器,其角速度和加速度的感测元件是由多颗芯片构成的,因此面临因角速度和加速度的轴偏离而影响输出精度的问题。松下推出的新型高质量、高可靠的6轴MEMS惯性传感器系列,也称为“6合1传感器”,单颗芯片集成了3轴MEMS陀螺仪和3轴MEMS加速度计,即利用基于单芯片MEMS技术实现高6轴正交性(轴间正交性≦0.01°),为提高车载系统的安全性能和设计自由度做出贡献。
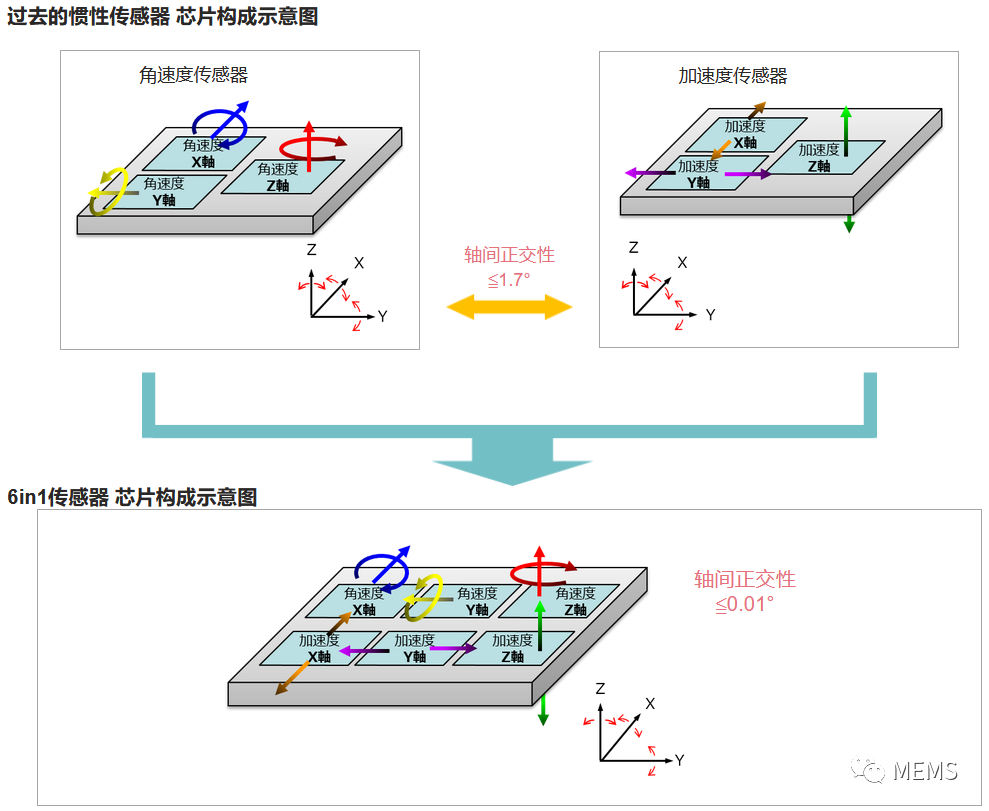
松下汽车类6轴MEMS惯性传感器采用单芯片解决方案
松下汽车类6轴MEMS惯性传感器采用电容式MEMS感测技术,通过晶圆级封装使得盖帽、MEMS和ASIC形成一体,实现了小型化的6轴惯性传感器,封装尺寸为4.5 mm x 4.5 mm x 1.1 mm。由此,为车载系统的综合化和车载ECU的小型化做出了贡献。
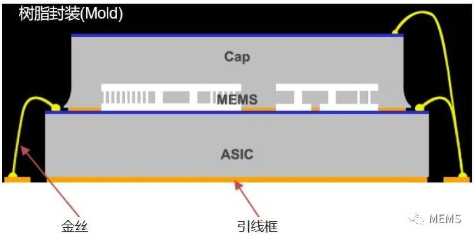
松下汽车类6轴MEMS惯性传感器剖面图
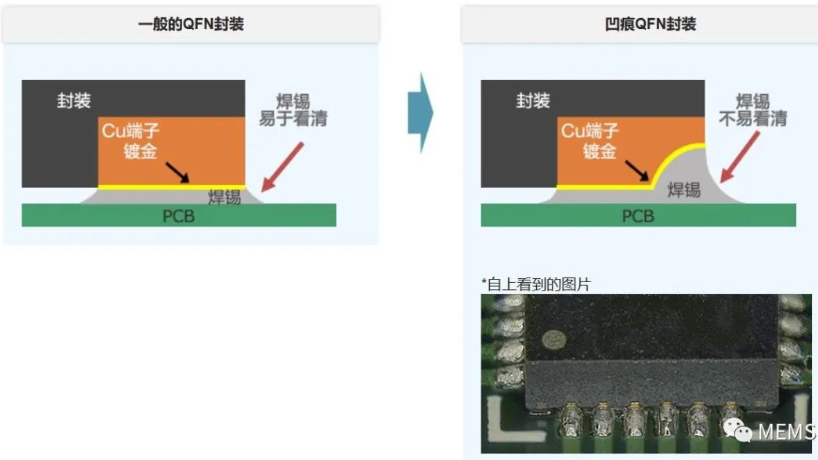
该惯性传感器封装形式为可润湿侧翼QFN。松下借助凹痕加工技术,使得这种封装外壳引脚的侧面能够形成可目视的焊脚。由此,通过焊脚的目视检查,即可确认引脚是否已被正常地焊接到基板的焊盘上。这可以实现高质量焊接,从而实现无差错装配,这对于汽车安全性、舒适性,以及工业应用都至关重要。
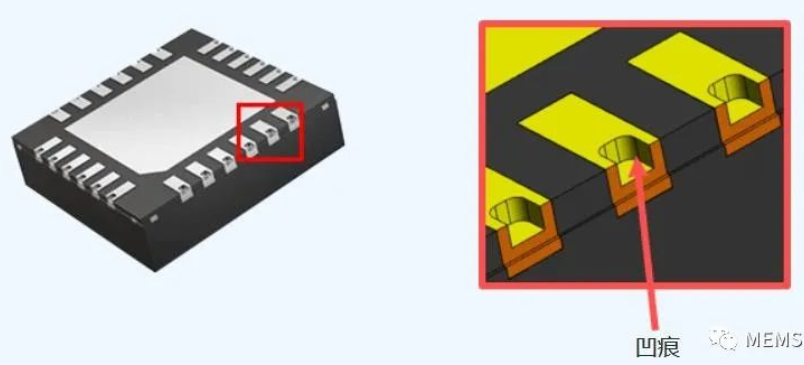
惯性传感器封装引脚凹痕加工示意图
贴装完后的惯性传感器外观示意图
松下汽车类6轴MEMS惯性传感器的一个关键用途是可以在剧烈振动的情况下(例如当汽车突然冲出道路时)检测车辆的运动状况,然后利用传感器数据来调整马达的扭矩和制动力,以实现安全的车辆状态。
该6轴惯性传感器还成功实施了与汽车安全相关的雷达(RADAR)/激光雷达(LiDAR)应用。通常,雷达/激光雷达会出现安装偏移,例如在车辆工厂组装和经销商运输过程中。因此需要工厂或经销商对此类安装偏移进行校准,使其不影响雷达/激光雷达的探测方向或被探测物体在3D地图中的位置精度。为此,工厂或经销商在静止情况下使用3轴加速度计进行倾斜检测以测量安装偏移,并且在运动情况时,还会使用3轴陀螺仪来测量偏移。
雷达/激光雷达可以搭配6轴惯性传感器以获得姿态(横滚、俯仰和偏航)及地理坐标信息,助力自动驾驶汽车实现更加安全的导航和定位功能。对于扫描周期较长的激光雷达等传感器,车载系统需要将上一个周期检测到的周围环境3D点云与当前周期检测到的3D点云进行比较。通过使用来自6轴惯性传感器的车辆运动数据,可以减少匹配上一个周期的3D点云和当前周期的3D点云的计算量。
在汽车行驶时,6轴惯性传感器能够动态地检测道路的起伏,车载系统根据传感器数据可修正雷达/激光雷达照射位置或探测到的物体在地图上的位置。尤其是在GNSS(全球导航卫星系统)信号被阻挡时(例如隧道中),基于惯性传感器的航位推算(DR)可以计算出当前车辆的位置,保证连续定位、稳健驾驶。
除了这些与汽车安全相关的应用之外,该6轴惯性传感器还成功地应用于AR-HUD(增强现实抬头显示)系统等舒适性应用。在这个用例中,惯性传感器检测车辆的运动,并可以使用“AR.markers”调整AR-HUD光束的位置,以便驾驶员以最佳方式观看。另一个与舒适性相关的应用是主动悬架系统,其通过惯性传感器采集车辆姿态信息,经过主动悬架控制器计算,向四轮减震器输出软硬不同的阻尼控制,最后通过控制四个减震器内部的电磁阀来动态调整悬架软硬。
松下目前正在进行不同实施状态的多个项目,推动商业应用领域也使用6轴惯性传感器。例如,自动驾驶巴士可以借助6轴惯性传感器来计算车辆是否在预定义的路径上。自主叉车受益于6轴惯性传感器提供的安全性和舒适性——例如防止货物从叉车上掉落。这些也适用于其它“即将实现自主运行”的机械——例如割草机、铁路列车或压实机。
审核编辑 黄宇
-
C2000™ADC(Type-3)性能与ACQPS的比较2024-09-14 733
-
基于C2000内部集成的模拟比较器功能2023-08-24 2292
-
内部和外部看门狗定时器的比较2023-04-03 5155
-
C2000内置比较器误差来源及校正方法2023-03-22 3702
-
使用C2000内部比较器替外部比较器2023-03-14 2856
-
C2000内置比较器误差来源及校正方法-F28004x, F2807x, F2837x2020-10-20 1486
-
C2000入门:C2000的基本知识介绍 (2)2019-04-15 5615
-
C2000入门:C2000的基本知识介绍(1)2018-08-14 14794
-
C2000微控制器的架构特点介绍2018-08-13 5596
-
C2000的开发环境2018-08-10 5083
-
C2000入门:C2000的复位系统介绍2018-08-06 6650
-
c2000的事件管理器及其应用2018-04-04 1127
-
目前C2000系列DSP用的比较普遍的是那几个型号2015-02-06 9548
全部0条评论

快来发表一下你的评论吧 !
