

光谱共焦传感器的测量原理和特点
MEMS/传感技术
描述
1666年,牛顿获得了一块三棱镜,开始了他的光学研究。
他在一间暗室的窗户上设置了一个小孔,紧挨着小孔放置着该三棱镜。阳光由小孔投射进来,透过三棱镜,将太阳的像投射到对面的墙壁上。使他感到“惊奇”的是,根据光的折射理论,这一成像的形状本应为圆形,然而他所看到的则是明显的长条形状,其长度达宽度的五倍。
牛顿高明之处就在于他已经意识到了不同颜色的光具有不同的折射性能,只有拉长距离才能分解开不同折射角的光线。
为了证明色散现象不是由于棱镜跟阳光的相互作用,也不是由于其它原因,而是由于不同颜色具有不同的折射性,牛顿又做了一个实验。他拿三个棱镜做实验,三个棱镜完全相同,只是放置方式不一样,倘若分散是由于棱镜的不平或其它偶然的不规则性,那么第二个棱镜和第三个棱镜就会增加这一分散性。可是实验结果是,原来分散的各种颜色,经过第二个棱镜后又还原成白光,形状和原来的一样。再经过第三个棱镜,又分解成各种颜色。由此证明,棱镜的作用是使白光分解为不同成分,又可使不同色光合成为白光。
公元1672年,牛顿把自己的研究成果发表在《皇家学会哲学杂志》上,这是他第一次公开发表的论文,论文的题目是《关于光和色的新理论》(New Theory about Light and Colors)。2月8日,他在英国皇家学会宣读了这篇论文。
牛顿进行色散实验
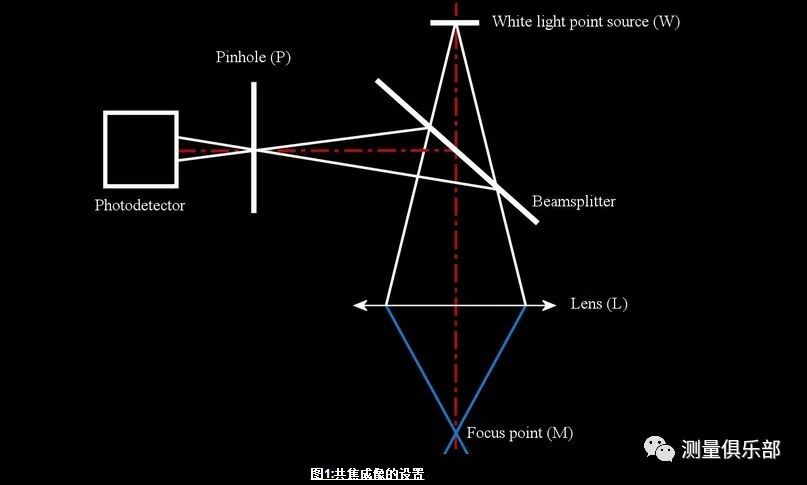
众所周知,自然界的日光属白光一种,白光不是最纯洁的光,而是许多单色光组成的。光在不同介质中传播可能会有角度偏差的现象产生,而实际的白光照射下不同介质将有很多单线光的折射。光学材料(透镜)对于不同单色光的折射率是不同的,也就是折射角度不同波长愈短折射率愈大,波长愈长折射率愈小(这也是不同望远镜所谓的色差不同的原因),同一薄透镜对不同单色光,每一种单色光都有不同的焦距,按色光的波长由短到长,它们的像点离开透镜由近到远地排列在光轴上(不同的单色光的波长是不同的)这样成像就产生了所谓色差透镜错误。色差透镜错误使成像产生色斑或晕环。在摄影器材中,应通过特殊处理,尽量消减色差透镜错误导致的成像问题。常用的消除方法有双胶合系统与双分离系统。 而光谱共焦测量方法恰恰利用这种物理现象的特点。通过使用特殊透镜,延长不同颜色光的焦点光晕范围,形成特殊放大色差,使其根据不同的被测物体到透镜的距离,会对应一个精确波长的光聚焦到被测物体上。通过测量反射光的波长,就可以得到被测物体到透镜的精确距离。这一过程与摄影器材通过各种方法消减色差的过程正好相反。 为了得到上述特殊的色差,需要在传感器探头内使用若干特殊透镜,用来根据所需量程将光线分解。最后使用一个凸透镜,将传感器探头射出的光线聚拢在一条轴线上,形成所谓的焦点轴线。如果不使用凸透镜,传感器探头射出的光将分散开来,测量也就无法进行了。
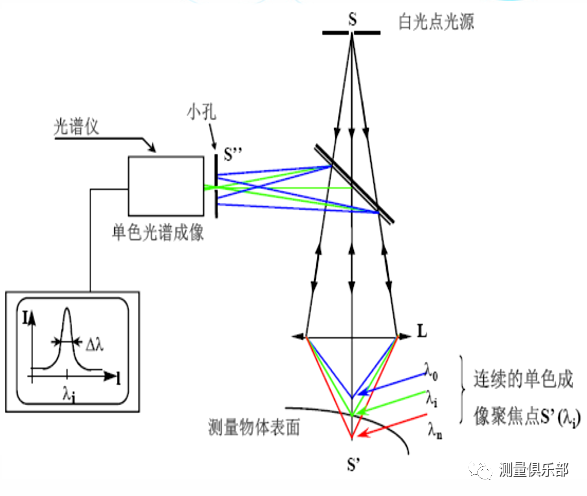
白色光通过一个半透镜面到达凸透镜。上述特殊色差就在这里产生。光线照射到被测物体后发生反射,透过凸透镜,返回到传感器探头内的半透镜上。半透镜将反射光折射到一个穿孔盖板上,小孔只允许聚焦最好的反射光通过。 透过穿孔盖板的光是一组模糊光谱,也就是说若干不同波长的光都有可能穿过小孔照在CCD感光矩阵单元上。但是只有在被测物体上聚焦的反射光拥有足够光强,在CCD感光矩阵上产生一个明显的波峰。 在穿孔盖板后面,需要一个分光器测量反射光的颜色信息。分光器类似一个特制光栅,可以根据反射光的波长,增强或减弱折射率。因此,CCD矩阵上的每一个位置,对应一个测量物体到探头的距离。 在整个量程上,共可以得到超过30,000个测量点。 这里只计算光线波长,用以产生测量信号。反射光产生的信号波峰振幅并不在信号测量依据之内。也就是说反射光的光强不会影响测量结果。 这意味着,无论有多少反射光从被测物体反射回来,测量的距离结果可能是不变的。因为反射光的光强仅仅取决于反射物体的反光程度。因此,采用ERT公司的光谱共焦传感器,即使被测物体是强吸光材料,如黑色橡胶;或者是透明材料,如玻璃或者液体,都可以进行正常可靠的测量。
一、光谱共焦传感器测量的特点
1、传统三角测距法对比
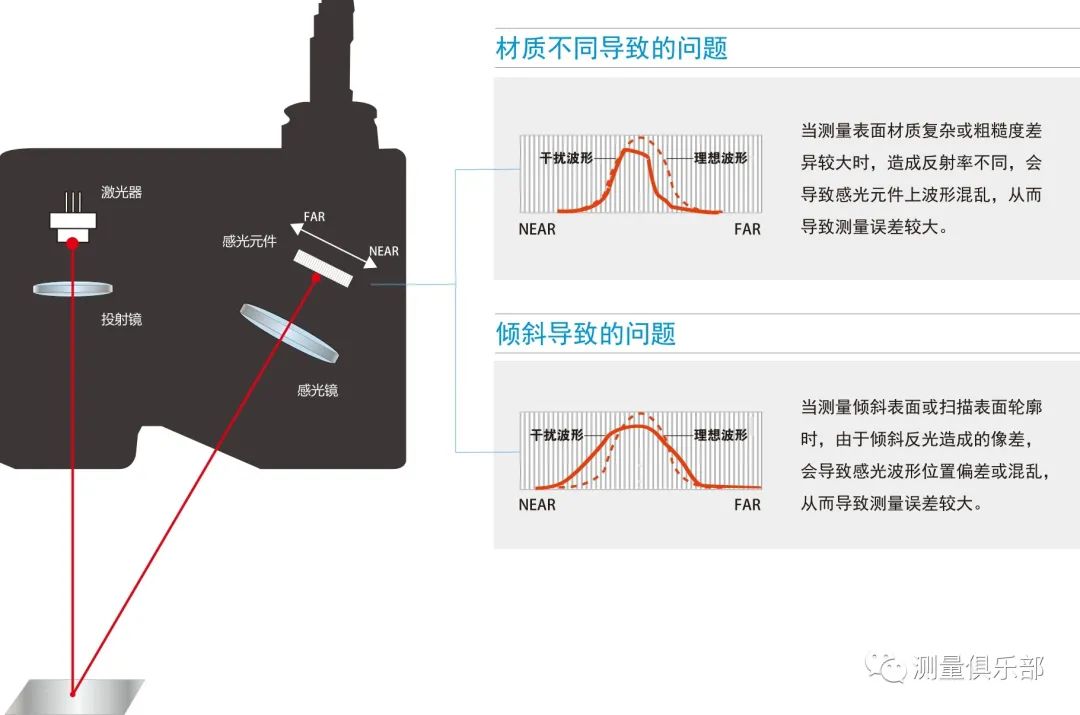
三角测距是利用感光元件(CCD/CMOS)上的光点位置变化来测量被测物的距离变化。虽然通过从感光波形计算出峰值或重心等特征量可减小误差,但从原理上,材质不同或对象物倾斜会导致感光波形出现位置偏差或波形混乱,从而产生测量误差
2、测量点错位问题
使用传统三角测距法时,随着高度不同,测量位置或光斑大小会发生改变。而共焦位移传感器的同轴共焦原理可以保证即使被测物存在倾斜或翘曲,也可进行高精度的测量,测量点不会改变。

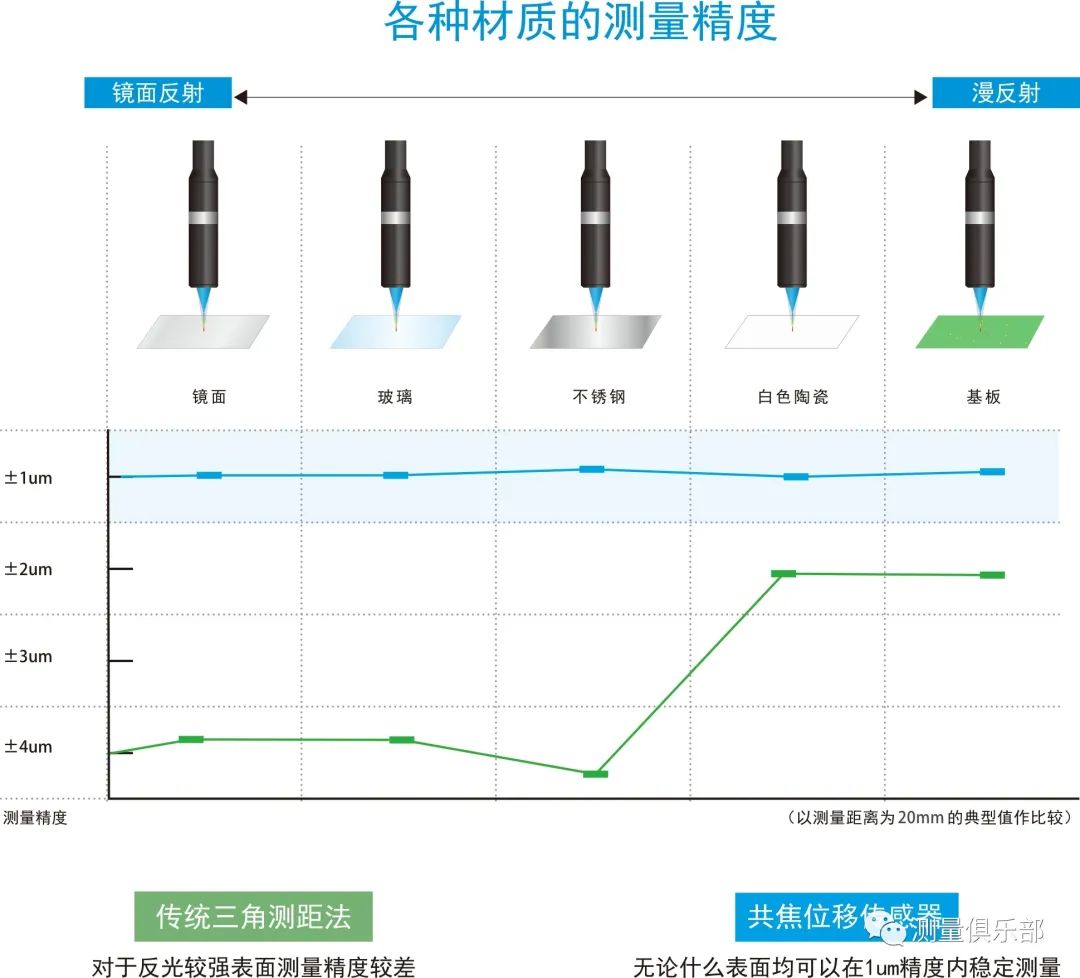
3、可稳定测量任何材质表面
4、超强角度特性,最大可测倾角87度
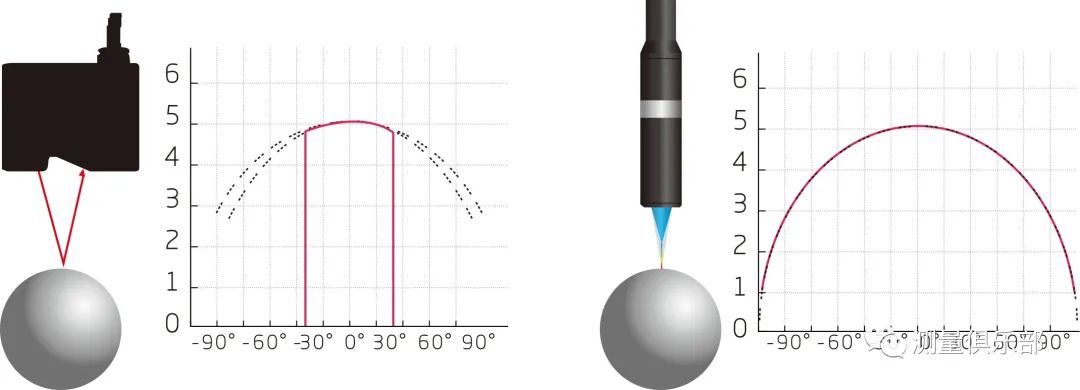
传统三角测距法 同轴共焦测距法
被测物倾斜角度过大时,受发光的像差影像, 由于其同轴共焦原理,所以无像差干扰问题,
即使有测量值,也有可能和真值有很大偏差。即使被测物有过大倾角也不会影像测量精度。
5、针对镜面、透明、半透明体表面也可以有超强角度特性
传统三角测距法,测量镜面体时,对传感器的安装角度有苛刻的要求。在使用多头测量玻璃或柔性样品厚度的应用中,安装时必须对各个传感器进行高精度的角度调整。使用共焦位移传感器,无需严格的角度调整就可进行高精度测量。即使被测物在运动过程中的跳动也不会对测量造成过大影响。
6、可同时测量并输出位移和厚度
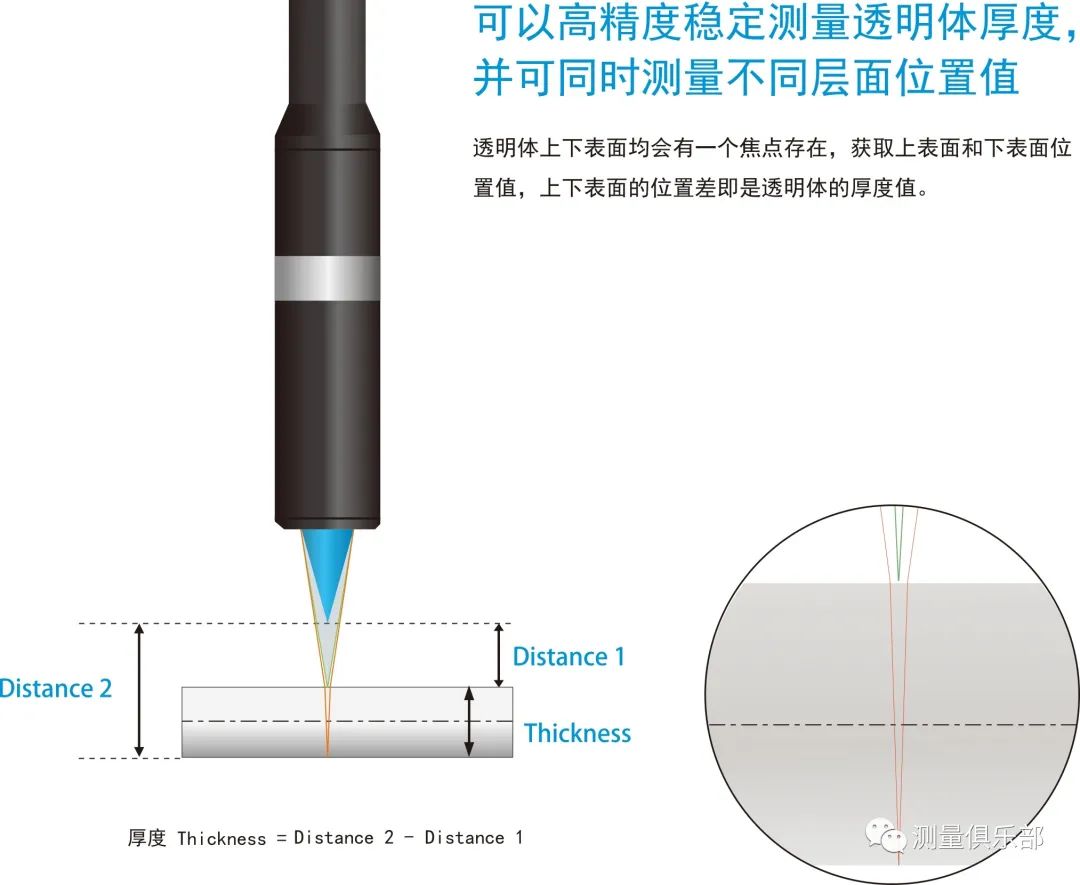
7、透明件的平整度和厚度可同时测量
镜面、透明、半透明体表面也可以有超强角度特性传统三角测距法,测量镜面体时,对传感器的安装角度有苛刻的要求。在使用多头测量玻璃或柔性样品厚度的应用中,安装时必须对各个传感器进行高精度的角度调整。使用共焦位移传感器,无需严格的角度调整就可进行高精度测量。即使被测物在运动过程中的跳动也不会对测量造成过大影响。
编辑:黄飞
-
光谱共焦测量原理2016-01-31 5291
-
光谱共焦位移传感器原理2018-03-07 5086
-
什么是光谱共焦传感器?2020-11-06 8746
-
光谱共焦传感器的共焦成像原理是什么2021-10-14 3424
-
光谱共焦测量原理是什么2021-11-02 7033
-
光谱共焦传感器测量的特点是什么2021-12-18 1287
-
光谱共焦位移传感器的位移测量模式2022-01-05 1179
-
如何实现光谱共焦传感器的外部触发及扫描2022-01-14 934
-
光谱共焦传感器的外部触发及扫描如何实现2022-02-17 3158
-
光谱共焦传感器测量段差的优势是什么2022-05-12 1615
-
光谱共焦位移传感器相比激光位移传感器测量的优势有哪些2022-09-14 2412
-
行业应用|立仪光谱共焦位移传感器对石墨厚度的测量2023-07-11 1128
-
光谱共焦位移传感器的测量原理是什么?又有哪些测量步骤呢?2023-12-19 3016
-
立仪光谱共焦传感器行业应用 透明胶水高度测量2024-08-15 998
-
点光谱共焦传感器测量透明材质应用2024-10-21 1443
全部0条评论

快来发表一下你的评论吧 !
