

分享四种4D毫米波雷达解决方案
描述
毫米波雷达最大的“缺陷”是分辨率不高,无法辨识行人和对周围障碍物进行精准的建模,而分辨率智能雷达传感器对于实现高级自动驾驶是未来的发展趋势。为了给雷达“开眼”,各家企业各显神通,采用不同的技术进行了大胆的创新,为了解决传统毫米波雷达角分辨率低、点云密度低的问题,当下出现了四种4D毫米波雷达解决方案:
1、基于传统CMOS雷达芯片,提供软件虚拟雷达孔径,强调“软件定义的雷达”,主要厂家有傲酷、Mobileye等;
软件虚拟雷达孔径,其核心在于通过软件模拟,增大毫米波雷达的孔径以提升角分辨率。角分辨率即为雷达的指向精度。比如雷达指向精度0.01弧度(换算成角度就是0.6度),那么自动驾驶车辆可以在100米的距离获得1米的分辨率。在雷达中,角分辨率的高低与波长与孔径大小有关。即波长越长,角分辨率越低,孔径越大,分辨率越高。
传统毫米波雷达大多为24GHz,波长较长且孔径小,其特性注定角分辨率低。倘若扩展天线的尺寸或者增加天线的数量,可以提高雷达性能,但也会显著增加成本、尺寸和功耗。而4D毫米波雷达可通过虚拟孔径成像软件算法和天线设计,模拟数倍、甚至数十倍天线以提升角分辨率。
美国的4D成像雷达公司傲酷推出的商用4D成像雷达EAGLE,其搭载虚拟孔径成像软件可动态发送相位调制的自适应波形。该波形可跟随环境实时变化,并随时间编码数据,从而可雷达硬件的角分辨率最高提升达100倍。最终实现120°水平/30°纵向的宽视场中提供0.5°水平x1°纵向的角分辨率。
2、将多发多收天线集成在一颗芯片,直接提供成像雷达芯片,比如Arbe、Vayyar等;
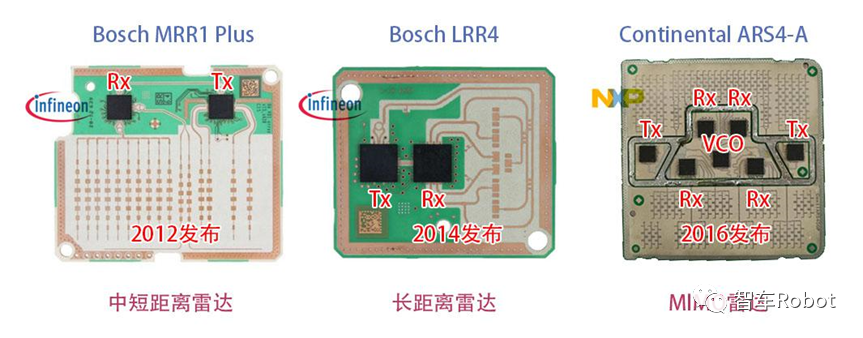
车用毫米波雷达芯片是整个系统的核心,它包括多种功能电路,如低噪声放大器(LNA)、功率放大器(PA)、混频器、压控振荡器(VCO)、锁相环频率综合器(PLL)、本振链路(LO)、移相器、倍频器、分频器、可编程增益放大器(PGA)、滤波器、甚至收发天线等,需要具备射频损耗小、噪声低、频带宽、动态范围大、输出功率大、功率附加效率高、抗电磁辐射能力强等特点。
当今量产的76GHz~81GHz毫米波雷达芯片技术大都采用SiGe制程,接收通道、发射通道和本振通道分开实现。目前正在向成本更低、集成度更高的硅基CMOS技术演进,从65nm、40nm逐步向28nm、16nm工艺演进,同时集成度进一步提高,实现射频前端、ADC、MCU和存储器单片全集成,达到成本低、封装小、重量轻、功耗低的设计要求。
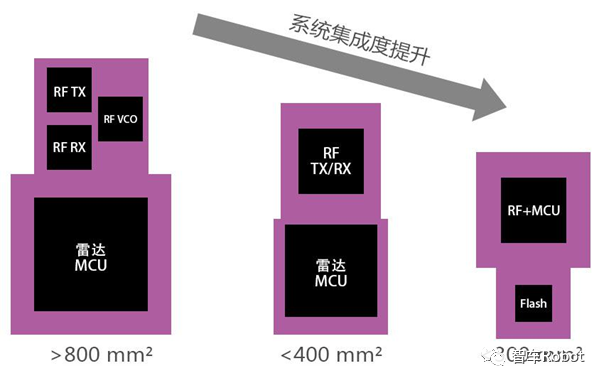
车用毫米波雷达核心芯片技术发展趋势 毫米波雷达根据点云密度由低至高可分为24GHz、77GHz、79GHz三种,其中24GHz为市场主流,77GHz及79GHz初入量产阶段。
点云密度低意味着自动驾驶车辆在行驶中无法对周围行人、车辆、桩桶点云成像,使得仅搭载毫米波雷达的车辆无法在复杂路段行驶。而目前4D毫米波雷达普遍为77GHz及以上频段,车辆可在行驶中达到类似激光点云的成像方式。
该技术的代表公司为以色列初创公司Vayyar,其推出的单片成像雷达可通过获取动态点云构建实时、高分辨率的四维可视化机舱和汽车外部环境。
3、将77GHz/79GHz的标准雷达芯片多芯片级联,以增加天线数量,比如大陆、博世、ZF等一众公司;
毫米波雷达天线的主流方案是微带阵列,利用较小的高频印刷电路板(PCB)空间产生足够的天线辐射强度,并实现与芯片的互连。
车用毫米波雷达天线与模块的主要技术路线 基于多芯片级联的79GHz MIMO毫米波成像雷达是未来产业化方向。采用多芯片级联和微型化PCB板载天线阵列,加上雷达信号处理,可以实现面向高精度多维成像的79GHz MIMO虚拟阵列雷达,将识别精度进一步提升到微米级别,支持距离、速度、角度、高度测量和多视角可调多工作模式,实现全天候下的多维毫米波成像。
芯片级联可分为二级联、四级联、八级联三种方法。通过将2个/4个/8个的3发4收的芯片联为一体,组成6发8收/12发16收/24发/32收芯片。然而,此种传统提高角分辨率的方式,只是简单堆砌更多芯片、更多天线。例如提高角分辨率到1度角,必须通过四个芯片级联、增加天线。但雷达硬件受成本、尺寸、功耗的限制较大,较少公司采用此方法提高角分辨率。
4、通过超材料研发新型雷达架构,代表厂家有Metawave等。
通过在超材料表面上嵌入显微结构,该结构可结合电磁波传播技术,以此创建出比传统电路要小很多的电路。此类技术为代表的公司是Metawave,其SPEKTRA雷达通过模拟波束并不断转向波束,可对350米以上的车辆和200米以上的行人进行检测和分类。
Metawave采用的方法是把电磁波束紧紧地聚拢起来,让其能量集中在一处,如图。而要实现这样的效果,在数字空间(Digital Space)是办不到的,只有在模拟空间(Analog Space)里才能做到。实际上,WARLORD可以说是一款模拟波束雷达产品(Analog Beam Forming Radar)。
WARLORD的技术特性:
其一,采用可操控的天线。Metawave采用的是单天线,而非天线阵列,同时接收也是单线的。这种天线由复合超材料结构而成,每一个超材料单元(Unit Cell)都有活跃组件能够参与波束成形,还能调整波束角度。这相较于如今大部分雷达用的多天线结构有很大的优势。
复杂的波束扫描
其二,信号收发端进行了整合。Metawave采用了英飞凌、NXP和TI等Tier2的芯片,并与他们进行合作,将天线和芯片组进行了整合。
其三,优越的微控制技术。比如要控制天线探测前方的物体,追踪其距离、角度、速度以及运动的方式,同时还要判断这些物体的类别,最后还要把这些经过处理的信息传送给(自动驾驶汽车)的传感器融合单元。
5、4D毫米波雷达的技术优势
4D毫米波雷达的四种方案,针对传统毫米波雷达缺陷逐个击破,以此拿到进入L3自动驾驶的门票 4D毫米波雷达在原有距离、方位、速度的基础上增加了对目标的高度维数据解析,能够实现距“3D+速度”四个维度的信息感知,可以有效地解析目标的轮廓、类别、行为。
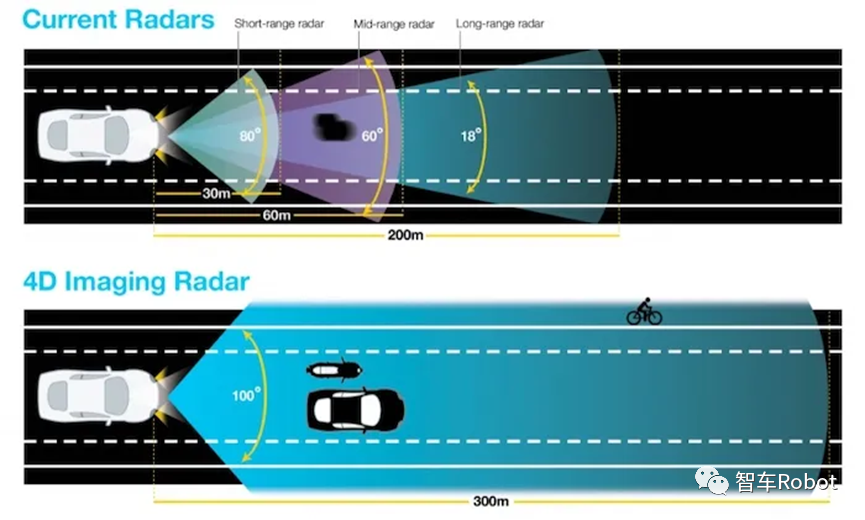
4D毫米波雷达对比 4D毫米波雷达系统可以适应更多复杂路况,包括识别较小的物体,被遮挡的部分物体以及静止物体和横向移动障碍物的检测。
从性能效果来说,4D成像毫米波雷达算是3D毫米波雷达的升级版,另一方面,从成本上看,4D成像毫米波雷达的成本也仅为激光雷达的10%-20%。
相比于传统的3D毫米波雷达,车载4D毫米波雷达在工作时,除了能够解算出目标的距离、速度、水平角信息,还能解算出目标的俯仰角信息,进而可以提供汽车周围的环境信息,能够避免窨井盖、路肩、减速带所产生的虚警现象。
除此之外,得益于能够提供目标的高度信息,捕捉到汽车周围目标的空间坐标和速度信息,4D毫米波雷达还能够提供更加真实的路径规划、可通行空间检测功能。
目前4D成像毫米波雷达产品,主要面临着两个难题:
首先是目前对4D毫米波雷达的需求并不明确。原本毫米波雷达只输出带有距离、速度信息的目标,但4D成像毫米波雷达还额外提供了具有方位角信息的点,企业究竟要利用这一特征达到何种感知目的,目前业内还没有明确的方案。
第二大难点则是现下业内并没有专门针对4D成像毫米波雷达的测试设备,行业的生态链并不成熟。厂商们只能利用传统毫米波雷达的测试设备,来验证其4D成像毫米波雷达产品的性能。但是目标模拟器这样的传统测试设备,其分辨率并不高,无法验证4D成像毫米波雷达的分辨率是否达到了1°或者零点几度。如果产品的一些基础性能出了问题,比如天线设计,没有办法在实验室里检测出来,做不了前端测试,无法形成一个完整的研发闭环。”
但4D成像毫米波雷达趋势已不可逆转。中国的4D成像雷达市场将领跑全球,国内市场L2+及以上新车搭载率有望在2025年突破50%。同时,4D成像雷达将从2023年初开始小规模前装导入,预计到2023年,搭载量有机会突破百万颗,到2025年占全部前向毫米波雷达的比重有望超过40%。
审核编辑:刘清
-
4D毫米波成像雷达的测试要求都有哪些嗯?2024-01-18 2287
-
国内4D毫米波雷达厂商名录2023-11-21 3910
-
对比ZF和特斯拉的4D毫米波雷达设计,国产4D毫米波雷达迅速崛起2023-07-07 3249
-
4D成像雷达专栏 | 4D高分辨毫米波雷达概述2023-05-21 9117
-
4D毫米波雷达市场技术盘点2023-05-09 1312
-
什么是4D成像毫米波雷达?4D成像毫米波雷达作用解析2023-03-20 5026
-
什么是4D毫米波雷达?4D毫米波雷达与传统雷达有何区别?2023-03-13 17385
-
特斯拉确认搭载4D毫米波雷达!它为何备受车企追捧?2023-02-23 5188
-
4D毫米波雷达加速了4D成像系统的可能性2023-01-04 2491
-
什么是4D毫米波雷达?2022-07-14 14762
-
4D毫米波雷达商用化之旅正在加速2022-03-07 4140
-
拥抱自动驾驶,4D成像毫米波雷达已悄然崛起!2022-01-12 9333
-
剖析如何做好一款4D高分辨毫米波雷达2021-04-05 9614
全部0条评论

快来发表一下你的评论吧 !
