

如何应用Anomalib在数据集不平衡的情况下检测缺陷?
描述
当您想进行自动缺陷检测,但数据集不平衡时,Anomalib 是一个很好的工具。
在这个示例中,我们将介绍一个令人振奋的 Dobot 机器人工业用例,其中的机械臂用于教育、工业和智能用例中。如果您没有可用的 Dobot 机器人,您可以简单地修改 notebook,避开、注释或改变机器人代码,使其为您所用。
让我们开始吧
为了解 Anomalib 的工作原理,我们将看一个检查彩色立方体的生产线。其中一些立方体会有洞或缺陷,需要从传送带上取下。由于这些缺陷在生产线上并不常见,我们将为我们的 AI 模型拍摄一些图像。
安装:
按照以下步骤使用源文件安装 Anomalib:
1.使用 Python 3.8 版本创建运行 Anomalib + Dobot DLL 的环境
对于 Windows,使用以下代码:
python -m venv anomalib_env
anomalib_envScriptsactivate
对于 Ubuntu:
python3 -m venv anomalib_env
source anomalib_env/bin/activate
2.从 GitHub 存储库中安装 Anomalib 及 OpenVINO 要求(在这篇博文中,我们将不使用 pip 安装命令):
python –m pip install –upgrade pip wheel setuptools
cd anomalib
pip install -e . [openvino]
3.安装 Jupyter Lab 或 Jupyter Notebook:
pip install notebook
pip install ipywidgets
4.然后连接您的 USB 摄像头,使用简单的摄像头应用验证它在正常工作。然后,关闭该应用。
可选:如果您可以访问 Dobot,请实施以下步骤:
1.安装 Dobot 要求。
2.检查 Dobot 的所有连接状态,并使用 Dobot Studio 验证它在正常工作。
3.将通风配件安装在 Dobot 上,并使用 Dobot Studio 验证它在正常工作。
4.在 Dobot Studio(图 2)中,点击“Home”按钮,找到:
校准坐标:立方体阵列的左上角初始位置。
位置坐标:机械臂应将立方体放在传送带上方的位置。
异常坐标:释放异常立方体的位置。
然后在 notebook 中替换这些坐标。
5.如需使用机器人运行 notebook,从这里下载 Dobot API 和驱动程序文件,并将它们添加到存储库 Anomalib 文件夹的 notebooks/500_uses_cases/dobot 中。
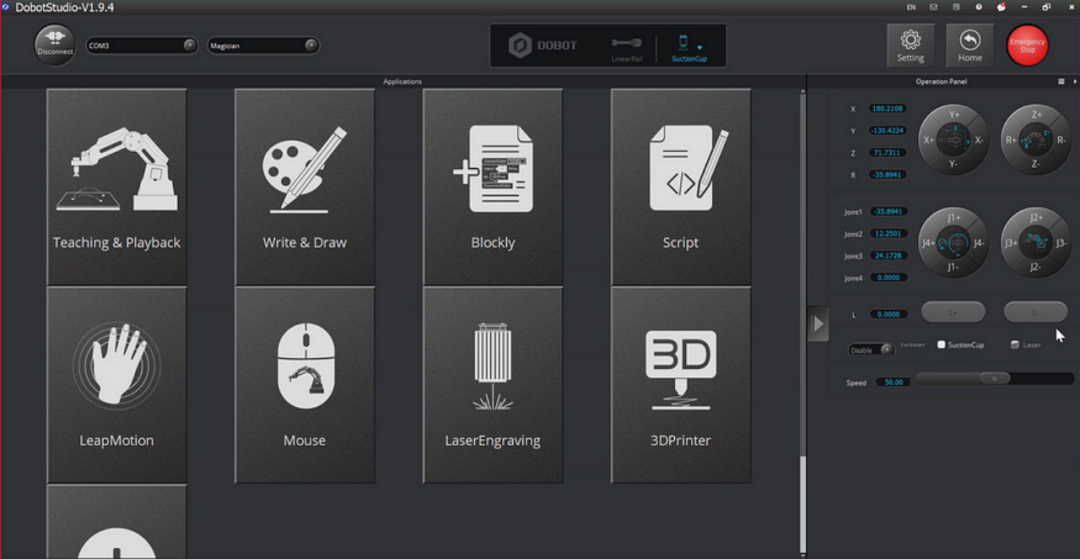
|图 2:Dobot Studio 界面。
注:如果没有机器人,您可以转到另一个 notebook,如 501b notebook,通过这个链接下载数据集,并在那里尝试训练和推理。
01
Notebook 的数据采集和推理
下面,我们需要使用正常的数据集创建文件夹。在这个示例中,我们创建了一个彩色立方体的数据集,并为异常情况添加一个黑色圆圈贴纸,以模拟盒子上的洞或缺陷(图 3)。对于数据采集和推理,我们将使用 501a notebook。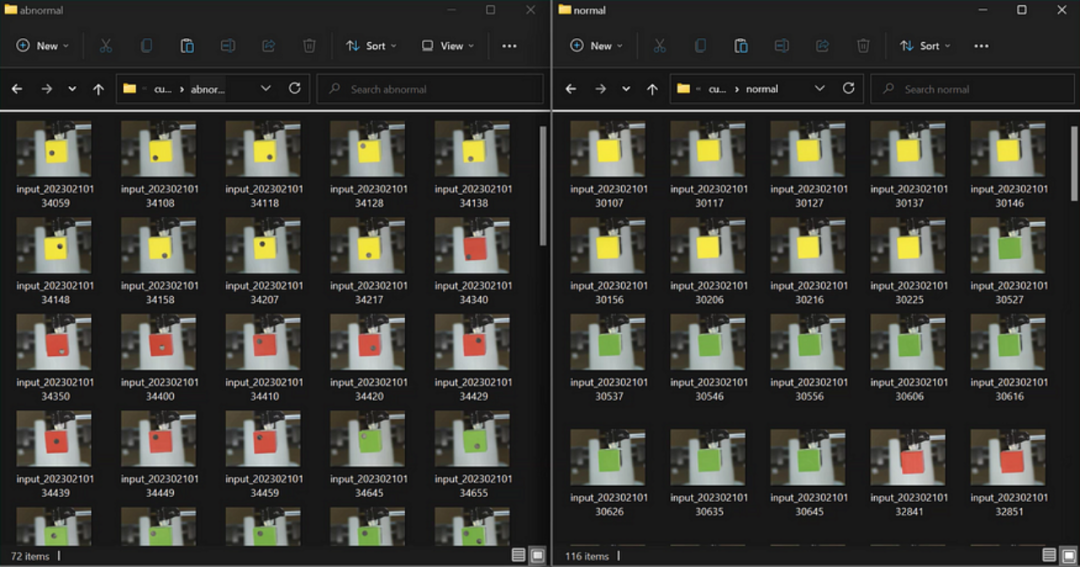
|图 3:用于第一轮训练的数据集。
在采集数据时,请务必将 acquisition 变量设置 为 True 来运行notebook,并为没有异常的数据定义“正常”文件夹,为异常图像定义“异常”文件夹。数据集将直接在 Anomalib 克隆的文件夹中创建,所以我们将看到 Anomalib/dataset/cubes 文件夹。
如果您没有机器人,您可以修改代码以保存图像或使用下载的数据集进行训练。
推理:
对于推理,acquisition 变量应该是 False,我们不会保存任何图像。我们将读取采集到的视频帧,使用 OpenVINO 运行推理,并决定放置立方体的位置:对于正常立方体,放置在传送带上;对于异常立方体,放置在传送带外。
我们需要识别采集标记 — 采集模式为 True,推理模式为 False。在采集模式下,要注意是创建正常还是异常文件夹。例如,在采集模式下,notebook 会将每张图像保存在 anomalib/datasets/cubes/{FOLDER} 中,以便进一步训练。在推理模式下,notebook 不会保存图像;它将运行推理并显示结果。
训练:
对于训练,我们将使用 501b notebook。在这个 notebook 中,我们将使用 PyTorch Lighting,并使用“Padim”模型进行训练。这种模型有几个优点:我们不需要 GPU,只用 CPU 就可以完成训练过程,而且训练速度也很快。
现在,让我们深入了解一下训练 notebook!
02
导入
在这一部分,我们将解释用于该示例的软件包。我们还将从 Anomalib 库中调用需要使用的软件包。
配置:
有两种方法来配置 Anomalib 模块,一种是使用配置文件,另一种是使用 API。最简单的方法是通过 API 查看该库的功能。如果您希望在您的生产系统中实施 Anomalib,请使用配置文件 YAML 文件,它是核心训练与测试进程,包含数据集、模型、试验和回调管理(图 4)。
在接下来的部分,我们将描述如何使用 API 配置您的训练。
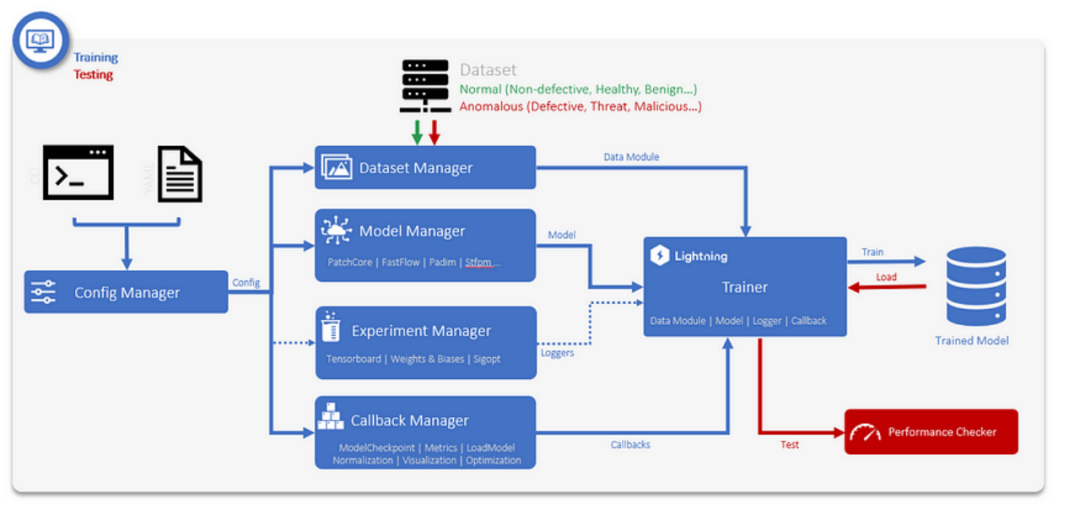
|图 4:训练和验证模块。
数据集管理器:
通过 API,我们可以修改数据集模块。我们将准备数据集路径、格式、图像大小、批量大小和任务类型。然后,我们使用以下代码将数据加载到管道中。
i, data = next(enumerate(datamodule.val_dataloader()))
模型管理器:
对于异常检测模型,我们使用 Padim,您也可以使用其他 Anomalib 模型,如:CFlow、CS-Flow、DFKDE、DFM、DRAEM、FastFlow、Ganomaly Patchcore、Reverse Distillation 和 STFPM。此外,我们使用 API 设置了模型管理器;使用 anomalib.models 导入 Padim。
回调(Callbacks)管理器:
为了适当地训练模型,我们需要添加一些其他的“非基础”逻辑,如保存权重、尽早终止、以异常分数为基准以及将输入/输出图像可视化。为了实现这些,我们使用回调Callbacks。Anomalib 有自己的Callbacks,并支持 PyTorch Lightning 的本地callbacks。通过该代码,我们将创建在训练期间执行的回调列表。
训练:
在设置数据模块、模型和callbacks之后,我们可以训练模型了。训练模型所需的最后一个组件是 pytorch_lightning Trainer 对象,它可处理训练、测试和预测管道。复制链接,查看 notebook 中的 Trainer 对象示例。
验证:
我们使用 OpenVINO 推理进行验证。在之前的导入部分,我们导入了 anomalib.deploy 模块中的 OpenVINOInferencer。现在,我们将用它来运行推理并检查结果。首先,我们需要检查 OpenVINO 模型是否在结果文件夹中。
预测结果:
为了实施推理,我们需要从 OpenVINOinference(我们可在其中设置 OpenVINO 模型及其元数据)中调用 predict 方法,并确定需要使用的设备:
predictions = inferencer.predict(image=image)
预测包含与结果有关的各种信息:原始图像、预测分数、异常图、热图图像、预测掩码和分割结果(图 5)。根据您要选择的任务类型,您可能需要更多信息。

|图 5:预测结果
最后,我们采用 Dobot 机器人的缺陷检测用例基本是这样的。
03
使用您自己的数据集的技巧和建议
数据集转换:
如果您想提高模型的准确性,您可以在您的训练管道中应用数据转换。您应该在 config.yaml 的 dataset.transform_config 部分提供增强配置文件的路径。这意味着您需要有一个用于 Anomalib 设置的 config.yaml 文件,以及一个可供 Anomalib config yaml 文件使用的单独 albumentations_config.yaml 文件。
强大的模型:
异常检测库并非无所不能,在碰到麻烦的数据集时也可能会失效。好消息是:您可以尝试 13 个不同的模型,并能对每个实验的结果进行基准测试。您可以将基准测试入口点脚本用于其中,并将配置文件用于基准测试目的。这将帮助您为实际用例选择最佳模型。
审核编辑:刘清
-
三相不平衡最佳解决办法 三相不平衡多少范围内是合理的2024-02-06 7164
-
三相电压不平衡对电路的影响2023-12-11 5992
-
I/Q不平衡的来源 IQ信道之间的不平衡会造成什么影响呢?2023-10-31 2380
-
三相电压不平衡是什么原因造成的?三相不平衡会跳闸吗?2023-09-25 13245
-
三相电流不平衡是什么原因引起的?三相电流不平衡的危害2023-08-31 10947
-
如何应用Anomalib在数据集不平衡的情况下检测缺陷 ?2023-03-27 4257
-
怎么解决变频器电流不平衡的问题2021-01-19 7585
-
如何理解矢量测量中“平衡”与“不平衡2020-03-29 3812
-
教你如何处理不平衡数据集2019-06-07 5729
-
当机器学习中遇到类不平衡,该怎么办?2019-03-27 1226
-
三相不平衡治理装置的应用优势2019-02-18 5056
-
三相不平衡的原因、危害以及解决措施2017-04-22 8540
-
不平衡数据集上的Relief特征选择算法_菅小艳2017-01-08 928
-
三相不平衡对变压器及用电设备的影响2010-11-09 2673
全部0条评论

快来发表一下你的评论吧 !
