

一文读懂通信串口(物理接口)1
电子说
描述
一、数据通信分类
计算机的数据传送方式:有并行和串行两种。
并行传送的特点是;各数据位同时传送,传送速度快、效率高。但需要的数据线多,因此传送成本高。并行数据传送的距离通常小于30米。
串行传送的特点是;数据传送按位顺序进行,最少只需一根传输线即可完成,成本低,但速度慢。串行数据传送的距离可以从几米到几千公里。
按照通信方式分类:同步和异步
同步通信:带时钟同步信号传输。比如:SPI,IIC通信接口
异步通信:不带时钟同步信号。比如:UART(通用异步收发器),单总线1-WIRE,CAN总线
在同步通讯中,收发设备上方会使用一根信号线传输信号,在时钟信号的驱动下双方进行协调,同步数据。例如,通讯中通常双方会统一规定在时钟信号的上升沿或者下降沿对数据线进行采样。
在异步通讯中不使用时钟信号进行数据同步,它们直接在数据信号中穿插一些用于同步的信号位,或者将主题数据进行打包,以数据帧的格式传输数据。通讯中还需要双方规约好数据的传输速率(也就是波特率)等,以便更好地同步。常用的波特率有4800bps、9600bps、115200bps等。
在同步通讯中,数据信号所传输的内容绝大部分是有效数据,而异步通讯中会则会包含数据帧的各种标识符,所以同步通讯效率高,但是同步通讯双方的时钟允许误差小,稍稍时钟出错就可能导致数据错乱,异步通讯双方的时钟允许误差较大。
二、 IIC (同步通信)
1、IIC概述 ( 同步通信 )
IIC总线是由Philips公司开发的一种简单、 同步 、半双工双向的两线式串口总线。
IIC只需要两根线进行通信,SDA(串行数据线)和SCL(串行时钟线)
SCL线——负责产生同步时钟脉冲。
SDA线——负责在设备间传输串行数据。该总线可以将多个I2C设备连接到该系统上。连接到I2C总线上的设备既可以用作主设备,也可以用作从设备
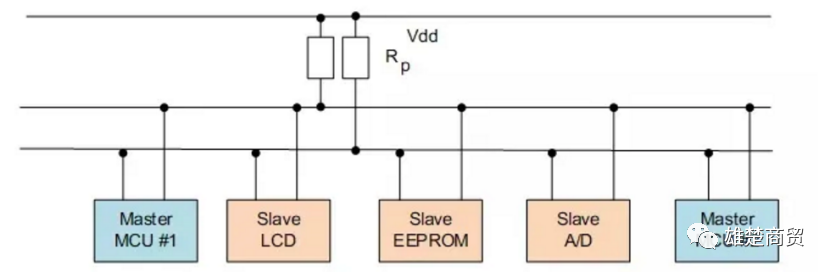
主设备负责控制通信,通过对数据传输进行初始化,来发送数据并产生所需的同步时钟脉冲。从设备则是等待来自主设备的命令,并响应命令接收。主设备和从设备都可以作为发送设备或接收设备。无论主设备是作为发送设备还是接收设备,同步时钟信号都只能由主设备产生。如果用通用IO口模拟I2C总线,并实现双向传输,则需一个输入输出口(SDA),另外还需一个输出口(SCL)。
1) IIC速率

三、SPI(同步全双工通信)
SPI是串行外设接口(Serial Peripheral Interface)的缩写,是一种高速的,全双工,同步的通信总线,SPI的速率比I2C高,一般可以到几十Mbps,不同的器件当主机和当作从机的速率一般不同。
SPI总线是同步、全双工双向的4线式串行接口总线。它是由“单个主设备+多个从设备”构成的系统。在系统中,只要任意时刻只有一个主设备是处于激活状态的,就可以存在多个SPI主设备。常运用于AD转换器、EEPROM、FLASH、实时时钟、数字信号处理器和数字信号解码器之间实现通信。为了实现通信,SPI共有4条信号线,分别是:

2) SPI典型应用
SPI最典型的应用是单主机单从机,下图是接线方式,当然也可以多从机

(1) 主设备出、从设备入(Master Out Slave In,MOSI):由主设备向从设备传输数据的信号线,也称为从设备输入(Slave Input/Slave Data In,SI/SDI)。(2)主设备入、从设备出(Master In Slave Out,MISO):由从设备向主设备传输数据的信号线,也称为从设备输出(Slave Output/Slave Data Out,SO/SDO)。(3)串行时钟(Serial Clock,SCLK):传输时钟信号的信号线。(4)从设备选择(Slave Select,SS):用于选择从设备的信号线,低电平有效。SPI 的工作时序模式由CPOL(Clock Polarity,时钟极性)和CPHA(Clock Phase,时钟相位)之间的相位关系决定,CPOL 表示时钟信号的初始电平的状态,CPOL 为0 表示时钟信号初始状态为低电平,为1 表示时钟信号的初始电平是高电平。CPHA 表示在哪个时钟沿采样数据,CPHA 为0 表示在首个时钟变化沿采样数据,而CPHA 为1 则表示在第二个时钟变化沿采样数据。

UART、SPI、I2C比较①I2C线更少,比UART、SPI更为强大,但是技术上也更加麻烦些,因为I2C需要有
双向IO的支持,而且使用上拉电阻,抗干扰能力较弱,一般用于同一板卡上芯片之间的通信,较少用于远距离通信。②SPI实现要简单一些,UART需要固定的波特率,就是说两位数据的间隔要相等,而SPI则无所谓,因为它是有时钟的协议。③I2C的速度比SPI慢一点,协议比SPI复杂一点,但是连线也比标准的SPI要少。④UART一帧可以传5/6/7/8位,I2C必须是8位。I2C和SPI都从最高位开始传。⑤SPI用片选信号选择从机,I2C用地址选择从机。
四、CAN(同步通信)
CAN是Controller Area Network的简称,是一种有效支持分布式控制或实时控制的串行通信网络,现在是汽车网络的标准协议。

CAN是控制器局域网络的简称,是一种能够实现分布式实时控制的串行通信网络。CAN总线的功能复杂且智能。主要用于汽车通信。CAN总线网络主要挂在CAN_H和CAN_L,各个节点通过这两条线实现信号的串行差分传输,为了避免信号的反射和干扰,还需要在CAN_H和CAN_L之间接上120欧姆的终端电阻。
1) CAN电平逻辑

五、 1-WIRE
单总线是美国DALLAS公司推出的外围串行扩展总线技术,与SPI、I2C串行数据通信方式不同,它采用单根信号线,既传输时钟又传输数据,而且数据传输是双向的。
1) 1-WIRE典型框图
如下是1-WIRE的典型框图,可以看到微处理器和1-WIRE器件之间只有一根线。


-
一文读懂接口模块的组合应用有哪些?2021-05-17 2469
-
一文读懂如何去优化AC耦合电容?2021-06-08 3708
-
一文读懂什么是NEC协议2021-10-15 2704
-
一文读懂中断方式和轮询操作有什么区别吗2021-12-10 2768
-
一文读懂传感器的原理与结构2022-01-13 2560
-
串口通信的物理层与协议层的相关资料推荐2022-02-17 989
-
一文读懂NB-IoT 的现状、挑战和前景2020-02-28 7762
-
一文读懂MCU的特点、功能及如何编写2021-12-05 1390
-
一文读懂通信串口(物理接口)22023-04-04 9967
-
一文读懂NTN卫星通信2023-11-09 4347
-
一文读懂,什么是BLE?2023-11-27 4976
-
一文读懂车规级AEC-Q认证2023-12-04 2279
-
一文读懂单灯控制器工作原理2024-11-11 2838
-
串口通信的硬件接口要求 串口通信与网络通信的比较2024-11-22 2463
-
一文读懂什么是「雷电4」2025-02-05 8636
全部0条评论

快来发表一下你的评论吧 !
