

基于simulink的异步电机矢量控制的SVPWM和滞环调制对比
电子说
描述
导读: 本期主要介绍异步电机矢量控制在滞环CHBPWM调制和SVPWM调制下的控制性能对比。
一、引言
应用PWM控制技术的变压变频器通常为电压源型,它可以根据所需的设计参数来控制输出电压。对于交流电机而言,需要保证其输出电流为正弦波电流,因为只有在交流电机绕组中通入三相平衡的正弦电流才能使其合成的电磁转矩为不含脉动分量的恒定电磁转矩。所以,要对电流采用闭环控制的方法,这比电压开环控制能获得更好的性能。传统SPWM控制技术并未考虑到输出电流的情况,它主要是使得变压变频器的输出电压为正弦波。电流滞环跟踪控制PWM (CHBPWM),直接控制输出电流使其接近于正弦波。而异步电动机为了在电机内产生旋转的圆形磁场,从而发出恒定电磁转矩,所以需要向异步电机输入三相交流电源。根据这一特性,若将逆变器和异步电机视为整体,按照跟踪圆形旋转磁场来控制逆变器的工作状态,其响应能力会更好,这种方式又称为磁链跟踪控制,即电压空间矢量PWM(SVPWM)控制技术。
为了更好地对异步电机在不同控制策略下的运行特性,本文采用Matlab/Simulink软件设计了电流滞环跟踪控制技术以及电压空间矢量控制技术的数学模型并加以实施在异步电机上,对异步电机在两种控制方式下的运行特性进行对比分析。
二、滞环和SVPWM调制策略
2.1 电流滞环跟踪控制PWM技术
滞环电流控制基本思想就是给定三相电流信号,并且与由电流传感器实测的三相电流相比较,以其差值通过滞环比较器来控制功率开关使实际电流值跟踪上参考电流值。
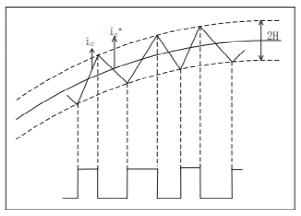
图1 滞环电流跟踪控制
图1为滞环电流跟踪控制的原理图,H为滞环比较器的环宽。在工作时ic_ref 与ic做差,得到的误差电流 ic 且始终处于以 0 为中心,H和 -H 为上下限的滞环内。H的设置是为了避免逆变器开关状态变换的速度过快,在ic_ref的基础上设计了上下两个宽度为h的误差滞环。
具体工作过程为:当ic_ref- ic > H时,滞环比较器输出高电平,驱动上桥臂的开关器件S1导通,使ic增大,当ic增加到与ic_ref相等时,滞环比较器仍然输出高电平,S1保持导通,ic继续增大;当ic - ic_ref > H时,滞环比较器翻转,输出低电平信号关断S1,并经过死区时间后驱动下桥臂的开关S4.但此时S4未必导通,因为ic(负载电流)并未反向,而是通过续流二极管D4维持原方向流通,其数值逐渐减小。
通过滞环控制,逆变器的实际输出电流与给定值的偏差保持在-h~h之间,在给定电流上下做锯齿状变化。当给定电流为正弦波时,输出电流也十分接近正弦波。
滞环电流控制法具有控制精度高,响应速度快,电流跟踪能力强等优点。但是滞环宽度 H 的选取合适与否,会直接影 响补偿电流跟踪指令电流,进而影响谐波补偿效果且滞环电流控制因为电流纹波大,开关频率不确定,所以很少被采用。
2.2 电压空间矢量脉宽调制技术(SVPWM)
在传统的PWM变压变频调速系统中,通常使用六拍阶梯波逆变器为交流电机提供电源。此时的电压空间矢量运动轨迹如图2所示,三相逆变器—异步电机调速系统主电路原理图如图3所示。
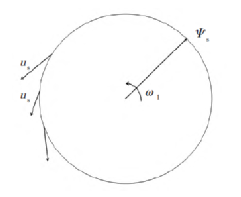
图2 旋转磁场与电压空间矢量的运动轨迹
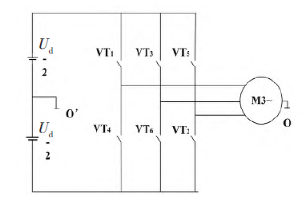
图3 三相逆变器-交流电机主电路原理图
逆变器采用的是上、下管换流方式,功率管共有八种工作状态。对于这种六拍阶梯波的逆变器而言,输出的每个周期都会出现一次有效工作状态且状态切换间隔为π/3。为了便于讨论将正六边形电压矢量转换为放射形式,如图4所示。各电压空间矢量间的相位关系仍然不变,这样可把逆变器的工作周期划分为6个扇区。
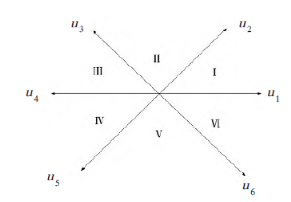
图4 电压空间矢量的6个扇区
在一个周期内,逆变器开关状态序列为100, 110,111,000,000,111,110,100。在实际工程中,系统应尽量减少开关状态变化是引起的损耗,因此在每次切换开关状态时,只切换一个开关器件,以满足最小的开关损耗。
综上可知,SVPWM控制模式的特点为:一个工作周期分为了6个扇区,为了使电机旋转磁场逼近圆形使得其控制方式依赖于开关频率的设定。开关切换合理,损耗较小。每个状态的切换以零电压开始,又以零电压结束。采用SVPWM控制方式时,输出侧的线电压基波最大值为直流侧电压,提高了输出能力。
本节讨论了SVPWM控制技术的原理基础,并对其工作特性进行了动态分析,为后面的仿真对比做出了铺垫。
三、仿真模型搭建
异步电机定子侧为三相绕组,转子侧为闭合的导电条,二者之间通过对气隙磁场的耦合作用进行工作。因此在对异步电机进行仿真时可以通过坐标变换的方式来进行解耦以使其具有和直流电机相似的调速特性。本文以Matlab/Simulink为仿真工具来对异步电机的电流滞环控制以及电压空间矢量控制方式进行对比分析。设定直流电压为540V,异步电机极对数为2,转动惯量为0.067kg·m,仿真时长1s。
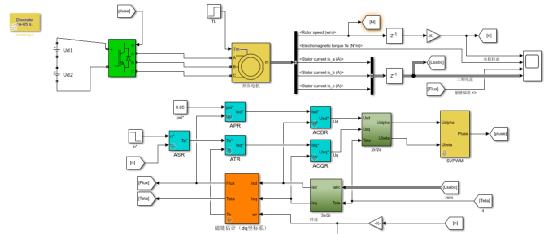
图5 基于SVPWM的异步电机矢量控制系统仿真
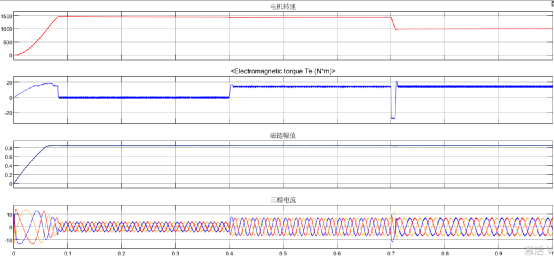
图6 基于SVPWM的异步电机矢量控制系统仿真波形变化情况
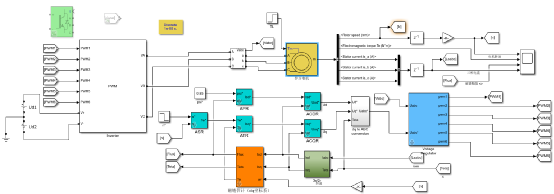
图7 基于CHBPWM的异步电机矢量控制系统仿真
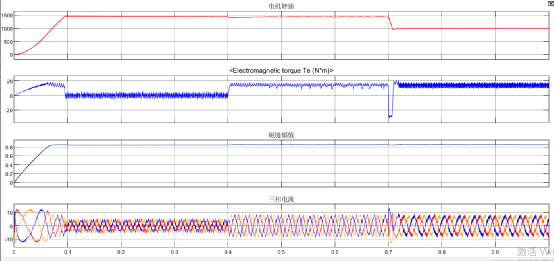
图8 基于CHBPWM的异步电机矢量控制系统仿真波形变化情况
通过图6和图8的波形对比,基于SVPWM的异步电机矢量控制系统的转矩纹波要小很多且在加载和转速突变的情况下,定子电流更趋于正弦。
四、总结
综上是对异步电机的工作特点进行分析,说明电流滞环控制以及空间矢量控制技术(SVPWM)的控制原理。使用Matlab/Simulink软件以上述两种控制方式对异步电机的仿真结果进行分析研究,实验证明:在SVPWM控制方式下的异步电机的稳定性更高、响应速度更快。
审核编辑:汤梓红
-
基于三电平SVPWM发波的异步电机矢量控制学习2023-03-30 1134
-
异步电机直接转矩控制simulink仿真2023-03-29 982
-
异步电机直接转矩控制simulink仿真教程2021-09-06 1698
-
如何将异步电机调速的矢量控制方法与SVPWM技术相结合2019-11-28 1648
-
异步电机_矢量控制2017-11-29 1337
-
基于SVPWM的异步电机矢量控制调速系统仿真2016-04-18 808
-
SVPWM调制异步电机矢量控制系统的原理与仿真2016-04-15 1055
-
异步电机的模糊PID矢量控制2016-04-06 913
-
异步电机SVPWM矢量控制系统仿真2016-03-30 603
-
异步电机的无速度传感矢量控制设计2016-01-21 4923
全部0条评论

快来发表一下你的评论吧 !
