

基于灵动微 MM32SPIN360C 的低压无刷电机应用方案
电子说
描述
近年来,无刷直流电动机在现代社会的众多领域中得到广泛应用,包括电动汽车、家用电器、办公自动化、工业控制、医疗器械等领域都有它的身影。它除了保持有刷直流电动机优越的启动性能和调速性能外,其最大的特点就是没有换向器和电刷组成的机械接触结构,因而具有低损耗、高效率、寿命长、噪声低、运行可靠、维护简便等一系列优点。
虽然无刷直流电机有诸多优点,但是在控制上却有一定难度。无刷直流电机的机械结构简单,这就要求驱动电路要有一定的复杂度,并且需要由 MCU 产生电机所需要的波形来控制电机的转动。
汇英同创针对低压无刷电机,推出基于灵动微 MM32SPIN360C 的无刷电机驱动方案。此方案采用的 MM32SPIN360C 内部集成了一部分驱动电路,所以方案的外围电路比较简单。适用于多种应用场合,比如空气净化器、服务器风机、吊扇、落地扇、电动手工具、吸尘器、无人机电调、小型水泵等。
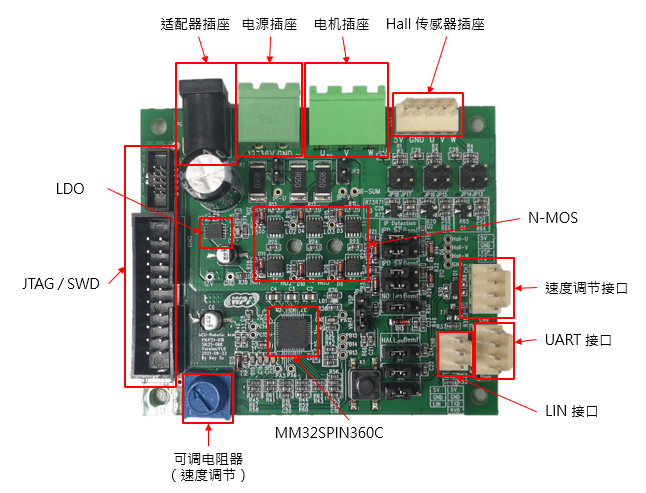
MM32SPIN360C 无刷电机开发板
主控
主控 MCU 采用的是 灵动微 MM32SPIN360C,使用高性能的 ARM Cortex-M0 为内核的 32 位微控制器,最高工作频率可达 96 MHz,内置高速存储器,丰富的 I/O 端口和多种外设,包括:
128KB Flash,12KB SRAMB
包含 12 位的 ADC,采样速度高达 1Msps
5 个通用定时器、2 个针对电机控制的 PWM 高级定时器
1 个 I2C 接口、2 个 SPI 接口和 2 个 UART 接口
针对电机应用内置 3 个运放,3 个比较器
内嵌经出厂调校的 48MHz 高速振荡器
内置预驱工作电压 7V ∼ 48V
5V LDO 稳压器,输入电压最高 13.5V
提供 QFN48 封装
MM32SPIN360C 框图如下图所示:
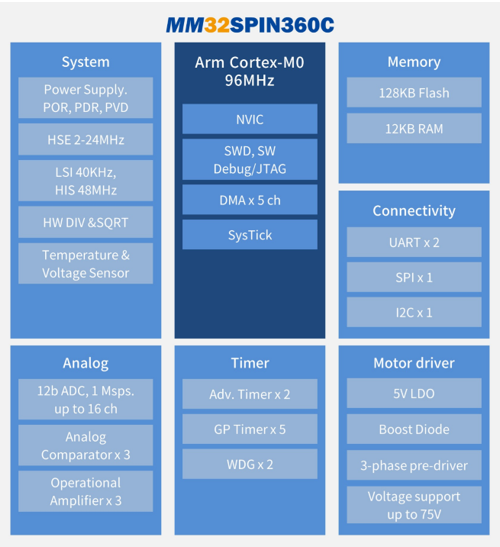
图 2 . 灵动微 MM32SPIN360C 框图
N-MOSFET
电机驱动部分,方案采用 6 颗 N-MOS 管来做电机的电子换相控制。芯片采用的是国产的 体积小、功耗低、漏源电压(VDSS)可以达到 60V,连续漏电流(Id)可以达到 42A,开关频率可以达到 30KHz 以上。
电源
方案采用的电源芯片是圣邦微的 LDO: SGM2225-ADJ,其特点如下:
宽电压输入 Vin:3.6~36V
输出电压可调 Vout:1.8V~15V
最大输出电流 Iout:800mA
低噪音、低损耗电压
封装小,最小封装大小为 3*3mm
过流/短路保护
过热保护
工作温度范围:-40~+125℃
驱动软件说明:
方案的软件部分采用灵动微的 FOC 软件库架构,整个软件结构清晰易懂。软件采用双环控制(电流环+速度环),矢量控制的框图如下图所示:
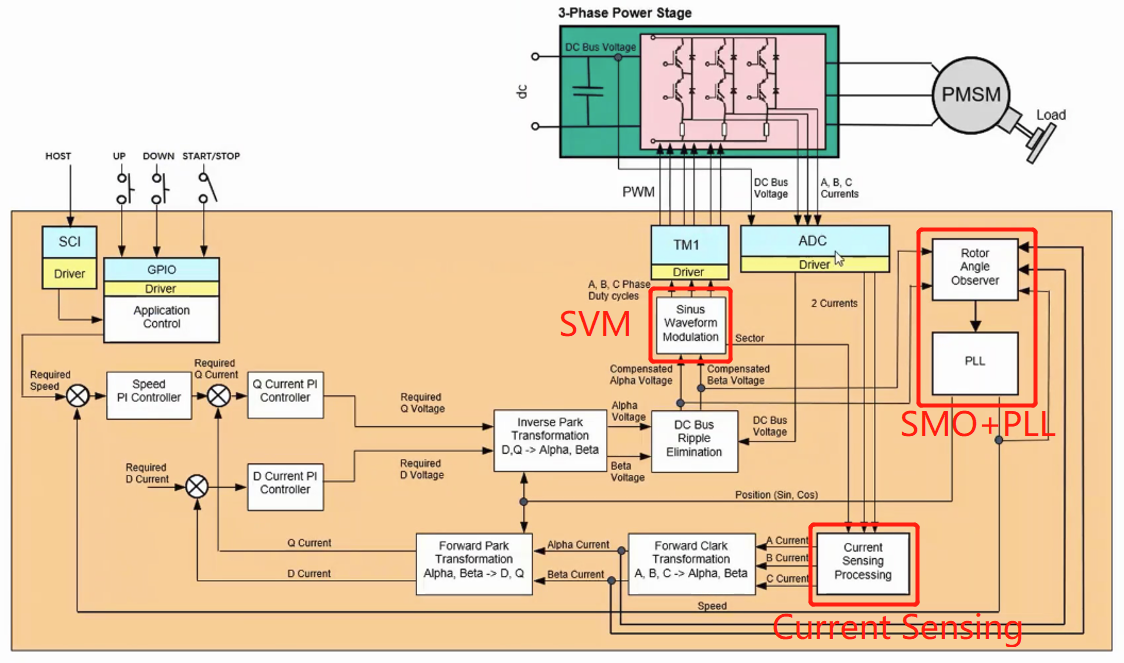
图 3 . 电机矢量控制框图
SVM
空间矢量脉宽调制(SVM)是 FOC 的基础,是根据其所在扇区选择非零矢量与零矢量合成而成,有五段式、七段式、混合式。七段式开关次数较多,但谐波较小;五段式开关次数是七段式的一半,但谐波较大。
代码采用的是七段式。其实现流程大致如下:
① 判断合成矢量所在扇区
② 计算相邻矢量作用时间
③ 计算各桥臂导通时间
④ 得到各相PWM占空比
⑤ 更新相应寄存器值
Current Sensing
在电流环,软件中的电流采样选择双电阻采样,通过采样 V 和 W 相的下桥臂电阻上的压降,再用基尔霍夫电流定律计算第三相(U 相)的电流。
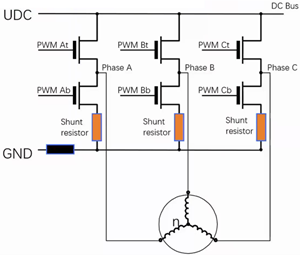
图 4 . 电流采样原理
SMO+PLL
在速度环,软件采用基于滑膜观测器(SMO)和锁相环(PLL)方法对电机转子的速度估计与控制。
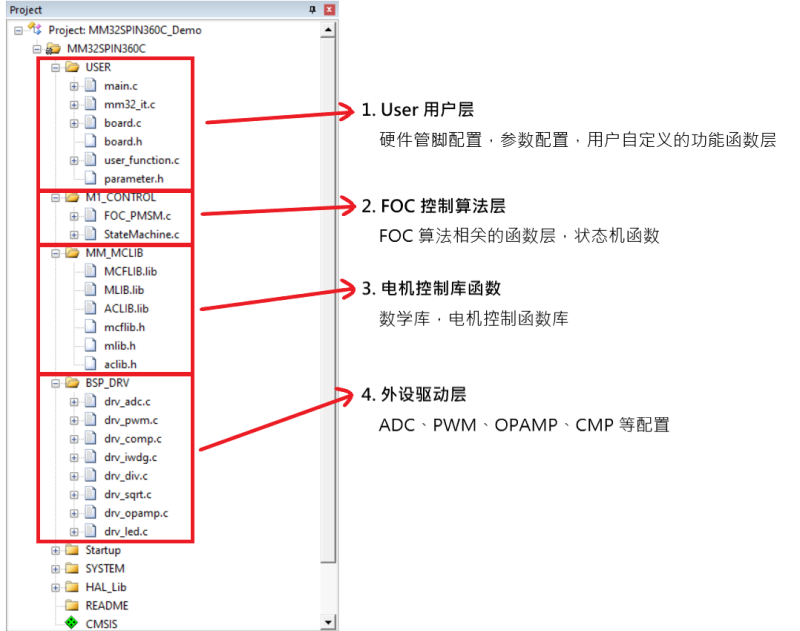
软件架构介绍
灵动微的 FOC 软件结构如下图所示,这套软件具有如下特点:
① 时序清晰 —— 仅使用一个常用中断,减少可能的时序冲突和 BUG。
② 便于移植 —— 算法层、驱动层、数学库完全独立,软硬件配置完全剥离,互不干扰。
③ 定标统一 —— 统一 Q15 小数定标。
④ 函数模块化 —— 逻辑清晰的状态机,简洁明了的状态切换。
⑤ 配置方便 —— 主要参数配置意义明确,可视化
-
基于灵动MM32SPIN560C的低压无刷电机应用方案2022-11-01 5552
-
灵动微MM32SPIN560C的低压无刷电机应用方案2022-11-29 1812
-
2019灵动微电子MM32 MCU智能之“芯”咖啡沙龙展示方案(一)——基于MM32SPIN360C的手持式吸尘器2019-02-18 5668
-
小编科普一下32位单片机MM32SPIN360C2021-09-03 2293
-
关于电机控制专用国产32位单片机MM32SPIN360C2020-11-30 3109
-
基于MM32SPIN系列MCU的AllIn One电机方案2021-09-22 1387
-
灵动微MM32SPIN360C获选2020年度国产MCU评选2021-11-06 1120
-
32位单片机MM32SPIN360C现货供应2021-11-19 1342
-
灵动微电动工具专用单片机MM32SPIN360C2021-12-21 2737
-
基于MM32SPIN360C芯片的低压无刷电机设计2022-04-18 3516
-
MM32SPIN360C 产品手册(中文版)2023-02-27 669
-
博文 | 基于灵动微 MM32SPIN560C 电机调试的方法2022-09-22 3119
-
方案 | 世平基于灵动微 SPIN560C 的低压无刷电机应用方案2022-09-23 1791
-
世平基于灵动微 SPIN560C 的低压无刷电机应用方案2022-12-08 1867
-
昂科烧录器支持MindMotion灵动微电子的32位微控制器MM32SPIN360C2024-08-02 1541
全部0条评论

快来发表一下你的评论吧 !
