

基于GA和PSO算法的反射阵列仿真设计
通信设计应用
描述
0 引言
反射阵因其高性能和灵活性,在通信、军事等领域的应用越来越广泛,譬如基站通信、车载雷达、目标物体的散射场改变等,都要求不同工作频率、带宽、RCS以及尺寸的反射阵,那么如何精确高效并低成本地设计出符合要求的阵列必将成为一个亟待解决的问题。目前反射阵广泛采用的设计方法是通过一定的理论建模,按照经验公式,进行相关的尺寸修改,最终得到比较满意的结果。本文应用阵列的基本设计方法,并结合FEKO软件仿真优化,既有规范的设计过程,又克服了理论分析精度低的缺点,并使设计周期缩短,设计成本降低,设计灵活性增强。
阵列的反射特性取决于阵元数目、阵元位置、阵元权系数,控制这三个因素可以改变反射场的特征,三者都可以通过优化达到一个最优值。FEKO软件包括遗传算法和粒子群算法两种优化方法。遗传算法(Genetic Algorithm,GA)是模拟生物界的遗传和进化过程而建立起来的一种搜索算法,基本思想是从一组随机产生的初始解,开始进行搜索,经过若干代之后收敛于问题的最优解或近优解;粒子群算法(ParticalSwarm Optimization,PSO)属于进化算法的一种,比GA规则更为简单,它通过追随当前搜索到的最优值来寻找全局最优。这种算法以其实现容易,精度高,收敛快等优点在解决实际问题中展示了其优越性。
1 基本原理和计算公式
1.1 相关公式
阵元这里采用规则的矩形贴片,所以单个阵元的RCS的计算公式为:

1.2 模型尺寸确定
阵列工作于10 GHz,覆盖的范围近似为一长度为1000mm,直径为260mm的圆柱面。阵元尺寸和周向间距相同,通过改变轴向间距d来调整RCS,如图1所示。
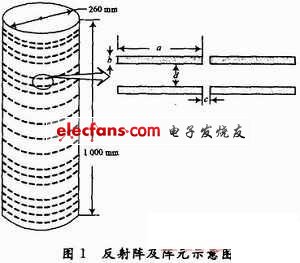
结合公式,取阵元的尺寸为a=15 mm,周向间距c=1 mm,同时为了保证阵列的各向同性性能较好,并兼具一定的带宽,这里取阵元宽度b=0.8 mm。此时,阵列的性能取决于d。
1.3 遗传算法和粒子群算法
遗传算法是一种借鉴生物界自然选择和自然遗传机制的高度并行、随机、自适应搜索算法,尤其适用于处理传统搜索方法无法解决的复杂、非线性问题。GA的并行模式可以分为两类:一类是将遗传算法的种群划分为若干子种群,使每个子种群在并行系统中各处理器中演化;另一种是将遗传算法中种群的个体分配到并行系统中的各处理器,计算适应度。后一种并行方式比前一种计算效率高,但是前一种方式无需并行计算机系统,也无需处理处理器间复杂的通信。
粒子群优化算法是通过模拟鸟群觅食行为而发展起来的一种基于群体协作的随机搜索算法。PSO初始化为一群随机粒子(随机解),然后通过迭代找到最优解,在每一次迭代中,粒子通过跟踪两个“极值”来更新自己。第一个就是粒子本身所找到的最优解,这个解称为个体极值pBest,另一个极值是整个种群目前找到的最优解,这个极值是全局极值gBest。
与GA比较,PSO的信息共享机制是很不同的。在GA中,染色体、互相共享信息,所以整个种群的移动是比较均匀地向最优区域移动。在PSO中,只有gBest提供信息给其他的粒子,这是单向的信息流动。整个搜索更新过程是跟随当前最优解的过程。与GA比较,在大多数的情况下,所有粒子都可能更快地收敛于最优解。
2 近场反射阵列的设计和仿真
2.1 反射阵列基本模型的建立
极子阵列可以避免等宽度金属圆环RCS图整体效果不好,调整灵活性较低的情况。前面已经确定了极子和周向间距的尺寸。轴向间距的确定,是在经验公式的基础上结合FEKO软件仿真数据,积累了更多数据,也更具直观性,为后续开发提供更多的资料。
在FEKO中,轴向间距d被设为变量,在总长度一定的情况下,让d从5~40 mm并以5 mm为间隔依次变化,同时计算绘制相应的RCS曲线。由多幅RCS图可以看出,当间距在35 mm时,68°处的效果最好,并且随着间距的提高,中蜂呈下降趋势,两个侧峰逐渐向中间靠拢,整体效果没有明显改善,但15 mm的间距可以小范围地提高RCS。
由以上得到的信息,并结合经验公式,建立出阵子列的初级模型如图2所示。
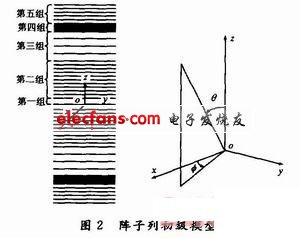
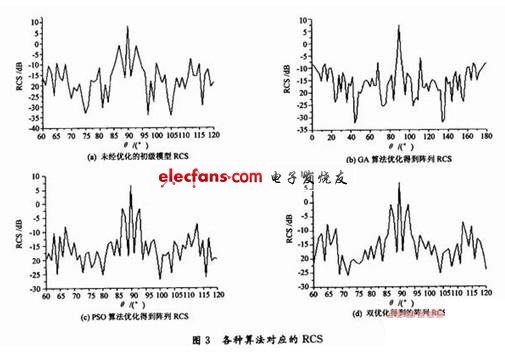
阵列关于xy平面对称,只看上半部分,从中心到两边依次为第一组到第五组阵子,阵子间距分别为d1,d2,d3,d4,d5,数值分别为25 mm,15 mm,35 mm,5 mm,15 mm,图3(a)是未优化初级模型所对应的RCS图。
2.2 数据优化
反射阵列要求θ在60°~120°之间的RCS均大于-20 dB,且整体效果图尽量好。在进行优化时,将优化条件设置为大于等于20 dB,优化范围为60°~120°,优化步长为5。
优化算法主要步骤:
(1)建立模型,将阵子间距设为变量,即需要优化的参数;
(2)确定优化方式;
(3)设置参数的优化范围和优化步长,以及优化所需达到的标准,即适应度;
(4)对模型进行计算网格划分,即计算的个体,个体中包含所需优化的尺寸信息;
(5)运行FEKO,对个体适应度进行计算;
(6)判断个体串适应度是否达到适应度标准,若是,则停止,若否,则继续;
(7)重复以上迭代过程,直到满足优化标准或是达到迭代次数;
(8)软件自动将计算好的最优尺寸输出显示,并可查看对应的RCS图;
(9)若一种优化算法达不到理想效果,则采用另一种算法,从第(2)步开始运行。
两种优化算法的结果如图3(b),图3(c)所示。
2.3 双优化
经过以上两轮优化,已经得到了比较理想的值,但为了使阵列更充分地使用可以利用的空间,在上述优化参数的基础上,采用双优化,即在GA中设置两个优化条件为:
(1)优化范围:60°~120°;优化条件:≥20 dB。
(2)阵列总长度在不超过1 000 mm的前提下尽量的长。仿真结果如图3(d)所示。
通过图3可以看出,优化算法相对于经验公式可以既快又好地提高阵列的性能。间距d1,d2,d3,d4分别为25.1 mm,15.3 mm,35.7 mm,5.1 mm,每组的间距个数分别为1,12,4,6,阵列关于xy平面对称。
3 仿真结果和实物测试结果
由于测量暗室条件的限制,无法测量原尺寸的圆柱,所以采用一条形平板代替测量。在此选用的平板尺寸为1 000 mm×16 mm,这个尺寸基本可以保持原阵列的性能。平板由两部分组成,仿真时底层为理想吸波材料做成的介质,顶层为理想金属极子贴片;实物底层为环氧玻璃,顶层为铜贴片,图4为实物图片。
为了方便测量,介质底板采用环氧玻璃,实际投入使用时,介质采用理想吸波材料制成的薄膜,可以任意贴在想要覆盖的区域,经济方便。
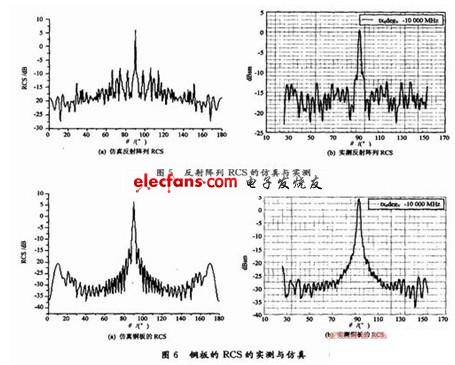
将柱面改为平面之后,模型尺寸大大减小,计算量也急剧减少,因此在此之前已经得到的优化值基础上进行进一步优化可以快速地得到理想的优化参数。为了更直观地比较阵列的优势,又仿真并实测了一个相同尺寸的铜板的RCS。图5、图6分别是仿真和实物测量的平板阵列和铜板的RCS图。从图5和图6中可以看出,极子阵列相对于同等尺寸的金属板RCS显著提高,并且分布更均匀,实物测量结果与仿真结果有很好的一致性。
4 结论
由上述可以看出,实测得到的曲线与仿真得到的曲线基本吻合,能够很好地满足最初的设计要求,由此说明本文提出的软件优化结合经验公式的方法能够准确、高效地设计出结构合理、满足不同性能要求的极子阵列,并且可以在此基础上灵活设计更加复杂的阵元和阵列拓扑结构。
-
基于矩阵填充与PSO的多标准协同过滤算法2021-05-26 1024
-
一种粒子置换的双种群综合学习PSO算法2021-04-29 1030
-
GA-PSO混合算法的变电站选址优化2018-03-09 936
-
GA与PSO的混合研究综述2018-02-05 1148
-
基于粒子群优化PSO算法的部署策略2017-12-26 1245
-
基于粗糙集和PSO、遗传算法的基因调控网络构建方法2017-12-09 1131
-
基于一种改进PSO辨识算法的DOB设计_陈鹏亮2017-01-21 946
-
基于PSO_CF的有限目标信号盲抽取算法2017-01-07 642
-
GA算法2016-07-20 626
-
新型高增益反射阵列天线的设计2012-02-29 1356
-
基于GA的智能天线系统前端扇区阵列设计2009-07-29 984
-
基于PSO的新算法在库存分类中的应用2009-07-11 747
-
PSO算法在数控机床交流伺服系统PID参数优化中的应用2009-05-17 4332
全部0条评论

快来发表一下你的评论吧 !
