

工程师说 | 基于虚拟平台协同模拟环境来实现车载软件开发左移
描述
进化中的E/E架构开发所面临的课题
软件正在为汽车创造新的价值,因此客户的应用软件正在有大规模化、复杂化的趋势。由此,提高软件开发的效率方法,已经成为高级车载软件开发必不可少的需求。
伴随着E/E架构的进化,需要同时搭载数个硬件。数个硬件中的数个软件之间的通信测试是必须的。只有在数个硬件之间的建立通讯之后,搭载在上面的数个软件才能进行通信测试。然而这个测试一般都是在开发后期才能进行,一旦发生问题,返工的成本也会随之上升。
如果利用模拟环境,在开发前期就可以进行测试。但是,各个硬件模拟环境之间没有建立通讯,所以没法进行多个硬件之间的系统级别测试。由于复杂的测试脚本不能执行,所以很难保证产品的质量。
多设备的协同模拟环境概要
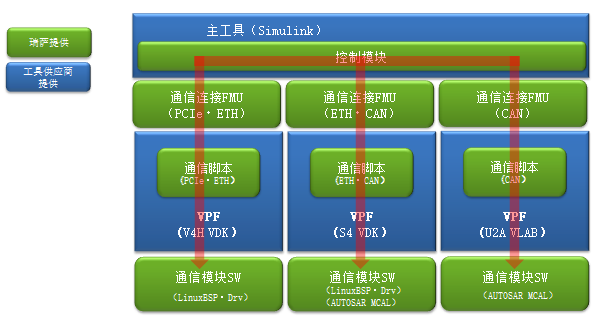
图1 多设备的协同模拟环境结构图
正如图1多设备的协同模拟环境结构图所示。瑞萨提议使用“多设备的协同模拟环境”来实现在没有实体硬件的情况下进行提前开发。
-
通过主工具(*1)把各个VPF连接起来的“FMU(*2)”以及“控制模块”
-
连接FMU与VPF的“通信脚本”
-
硬件模拟器“VPF(*3)”
-
在相互连接的VPF之上运行的“通信模块SW”
因为在VPF上开发的软件可以直接在硬件上运行,即使硬件开发延迟也不会影响软件的开发与测试。这样的话,可以提前开发相互通信连接的软件,并可以在开发前期就能进行测试。(用户需要拥有主工具与VPF)
(*1) 主工具:调整与同步各VPF的动作。
(*2) Function Mockup Unit(FMU):根据Function Mockup Interface(FMI)的要求来连接不同工具的库。由主工具将其导入,在主工具内相互连接。
(*3) Virtual Platform(VPF):模拟SOC与MCU,在硬件上的软件不用修改就可以直接在VPF上运行。
CAN模型间的连接方法
正如图2通过FMI连接的模型之间利用CAN的通信方法所示。
FMI定义了收发信息的类型与时机,但是没有定义具体的通信式样。用户可以通过FMI来定义具体用什么模式、选择什么方式的连接式样。
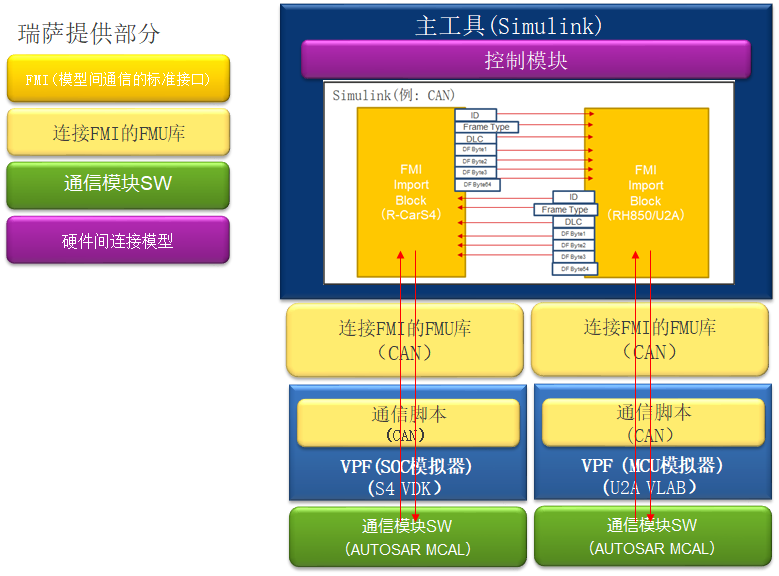
图2 通过FMI连接的模型之间利用CAN的通信方法
如上图通过FMI连接的模型之间利用CAN的通信方法
多设备的协同模拟环境开发状况
由此,在多设备的协同模拟环境里,图2的FMI import Block之间利用CAN的通信式样,就可以进行通信了。
本文介绍了R-CarS4与RH850/U2A之间CAN通信的多设备的协同模拟环境。我们录制好了实际的动作视频,您可点击文末阅读原文查看。
通过这个解决方案,在没有实体硬件的情况下,使用相互通信的开发环境,可以进行车载软件开发。通过使用多设备的协同模拟环境,可以提前检测出潜在的Bug,缩短整体的测试时间从而提高软件的品质。
今后,R-CarV4H将与马达等平台模型连接。这样以来,人们可以从事更广阔范围的硬件间的连接的软件开发/软件研究。
由此,在多设备的协同模拟环境里,图2的fmi>利用上面这些模块,在没有实体硬件的情况下,开发相互通信的软件。
1
END
1
瑞萨电子 (TSE: 6723)
科技让生活更轻松,致力于打造更安全、更智能、可持续发展的未来。作为全球微控制器供应商,瑞萨电子融合了在嵌入式处理、模拟、电源及连接方面的专业知识,提供完整的半导体解决方案。成功产品组合加速汽车、工业、基础设施及物联网应用上市,赋能数十亿联网智能设备改善人们的工作和生活方式。更多信息,敬请访问renesas.com
原文标题:工程师说 | 基于虚拟平台协同模拟环境来实现车载软件开发左移
文章出处:【微信公众号:瑞萨电子】欢迎添加关注!文章转载请注明出处。
- 相关推荐
- 热点推荐
- 瑞萨
-
工程师说 | RX系列软件的历史和今后的展望 #62023-11-16 1862
-
工程师在MCU平台上进行软件开发会面临哪些挑战?2023-04-12 743
-
嵌入式软件开发工程师与FPGA开发工程师的区别是什么?2021-11-22 10348
-
嵌入式软件开发工程师与FPGA开发工程师2021-10-20 1520
-
嵌入式软件开发工程师与FPGA开发工程师 精选资料分享2021-08-18 2197
-
IBM Engineering Workflow Management—软件协作开发管理平台2021-07-09 2380
-
Linux软件开发环境2021-03-25 1263
-
虚拟仪器软件开发平台LabVIEW的教程说明2020-04-26 1658
-
数字资产虚拟货币交易平台软件开发2018-07-10 1060
-
嵌入式软件开发工程师培训 嵌入式系统主要特点2017-04-27 2490
-
软件开发工程师模拟试题12016-03-22 706
-
诚聘软件开发工程师2015-07-13 3340
-
虚拟仪器软件开发平台2009-06-22 852
全部0条评论

快来发表一下你的评论吧 !
