

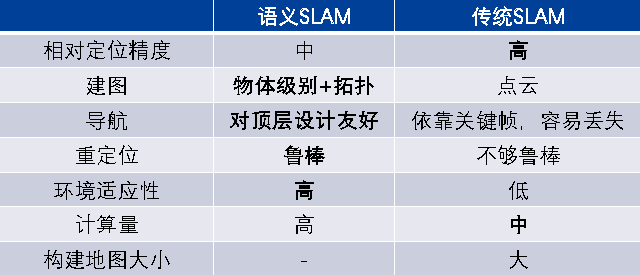
语义SLAM系统和传统SLAM系统对比
人工智能
描述
浅谈语义在SLAM中的应用
Simultaneous Localization And Mapping(同时建图与定位)
可以分为四大部分:initialization, tracking, local mapping, global optimization
视觉SLAM主要涉及的知识
多视角几何:投影几何,相机模型
图像处理:特征提取,特征点跟踪
优化算法:非线性优化算法(Levenberg-Marquardt法)
INITIALIZATION
一般将第一张图像进入系统时的相机位姿作为V-SLAM系统的参考坐标系
选取之后输入的某张图像计算和第一张图像匹配角点并三角化获取深度,生成候选的初始化MAP
重投影计算误差,如果误差太大则重新选取图像
直到误差小于阈值,进行一次优化,得到初始化MAP
TRACKING
计算当前图像和之前相近图像的关系(特征点匹配,光流法,边缘跟踪等等)
根据计算出的关系,通过相应算法估计当前相机的大概位置
其中“直接法”将前面两部合并为一步来执行
LOCAL MAPPING
可以采取滑动窗口的方式或者挑选某些关键帧来建立局部地图
当某一帧图像根据策略算法选为关键帧后,添加到局部地图的关键帧队列中
管理局部地图中存在的点云
进行局部的Bundle Adjustment(BA)
最后进行关键帧的管理
GLOBAL OPTIMIZATION
利用BOW挑选出候选回环帧
对候选回环帧进行验证,确保是正确的回环
根据回环帧计算累积漂移误差
最后进行全局优化
语义SLAM
为什么要语义?
对环境的鲁棒性(动态环境)
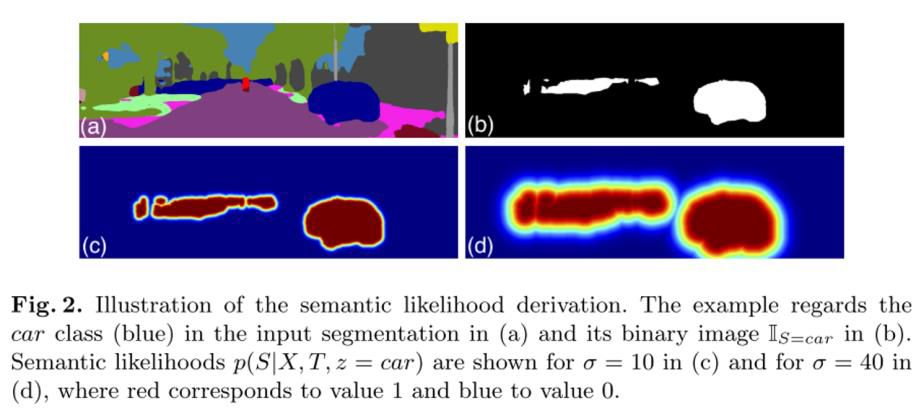
获取地图的先验信息,得到更高精度(添加语义约束)
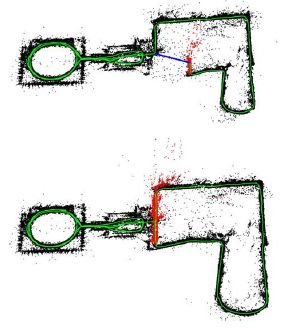
更好地回环检测
人机交互(如CAD制图)
传统回环检测
目前比较主流的回环检测方法一般都依赖于BoW(bag of visual words)方法
开源库:DBoW2: https://github.com/dorian3d/DBoW2(当然还有DBoW3,fbow)
连续帧匹配DLoopDetector:https://github.com/dorian3d/DLoopDetector
ORB-SLAM,VINS等都使用了DBoW2
其他检索方式还有LSH(Locality-Sensitive Hashing)以及
LLC(Locality-constrained Linear Coding)
语义能够给SLAM系统带来的好处
支持中长期的tracking
环境适应性更强(鲁棒性)
潜在的人机交互特性
语义SLAM系统和传统SLAM系统对比
由于我们 人类见过大量的图像,形成了一种天生的直觉,对大部分场景都有一个直观的距离感 (空间感),它可以帮助我们判断图像中物体的远近关系。
1.平移之后才能计算深度
2.无法确定真实尺度
原因是通过单张图像无法确定深度。
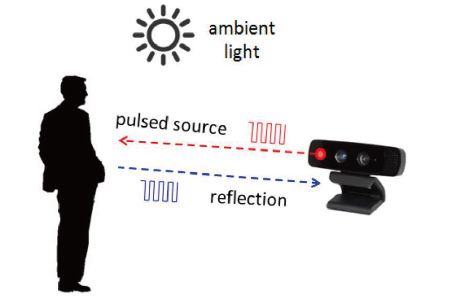
深度相机(称RGB-D相机)最大的特点是可以通过红外结构光或Time-of-Flight(ToF) 原理,像激光传感器那样,通过主动向物体发射光并接收返回的光,测出物体与相机之间的距离。这部分是通过物理的测量手段来解决的,所以不需要大量的算力。
ToF
基本原理是通过连续发射光脉冲(一般为不可见光)到被观测物体上,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。
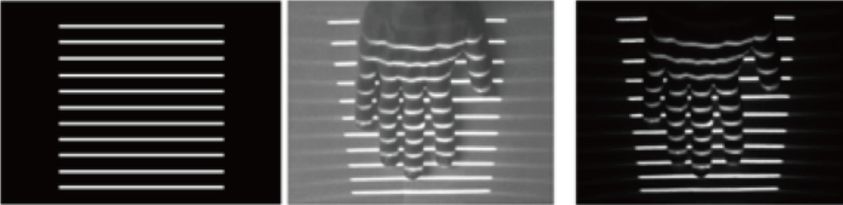
结构光
结构光测距是用一个光源(常用是红外)将一定的图案投射到物体上,再用摄像头收集变形后的图案进行深度计算。
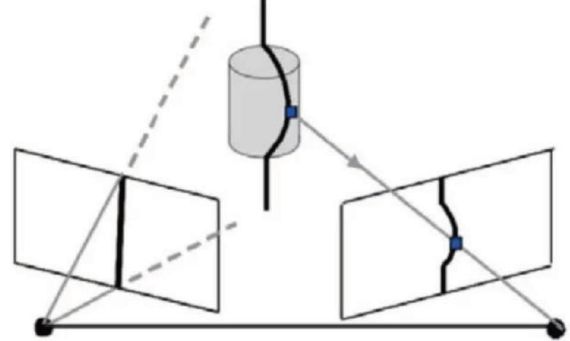
这种方法比纯双目匹配好的地方在于,参考图像不是获取的,而是经过专门设计的图案 ,因此特征点是已知的,而且更容易从测试图像中提取。结构光采用三角视差测距,基线(光源与镜头光心的距离)越长精度越高。由于是主动光,无法在室外使用。
不论是一般结构光还是散斑结构光,缺点是它所使用的激光器发出的编码光斑容易被太阳光淹没掉, 工作距离短,室外阳光下不工作。
结构光方案中的激光器寿命较短,难以满足7x24小时的长时间工作要求,其长时间连续工作很容易损坏。而因为单目镜头和激光器需要进行精确的标定,一旦损坏,替换激光器时重新进行两者的标定是非常困难的,所以往往导致整个模块都要一起被换掉。
现在多数 RGB-D 相机还存在测量范围窄、噪声大、视野小、易受日光干扰、无法测量透射材质等诸多问题,在 SLAM 方面,主要用于室内,室外则较难应用。
立体视觉
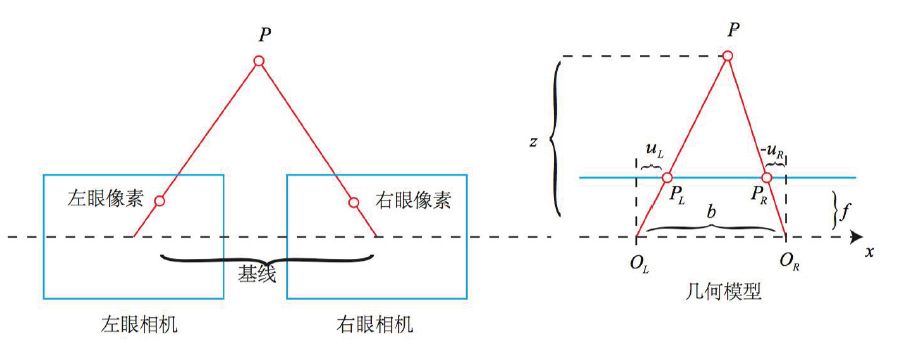
双目相机 的距离估计是比较左右眼的图像获得的,并不依赖其他传感设备,所以它既可以应用在室内,亦可应用于室外。
双目立体视觉是纯视觉的方法,需要逐像素计算匹配;同时,为了保证匹配结果比较鲁棒,算法中会增加大量的错误剔除策略,因此对算法要求较高,计算量较大。
VSLAM(Mono)
优势:成本低、搭建简单
劣势:
1) 需要专门初始化
2) 尺度问题
在单张图片里,无法确定一个物体的真实大小。它可能是一个很大但很远的物体,也可能是一个很近很小的物体。
3) 深度计算存在缺陷
a. 3D假图问题
b. 机器学习的样本问题
VSLAM(Stereo)
优势:
1) 不需要专门初始化
2) 能够计算深度
3) 能够用于室内和室外
劣势:
1) 标定较为复杂
2) 视差计算比较耗资源,需要GPU/FPGA 或 专门的ASIC芯片 协助
编辑:黄飞
-
基于多模态语义SLAM框架2022-08-31 2856
-
SLAM技术的应用及发展现状2018-12-06 15542
-
视觉SLAM特征点法与直接法对比分析2020-06-02 2588
-
激光SLAM与视觉SLAM有什么区别?2021-07-05 4720
-
激光SLAM技术在机器人运动控制系统中的应用是什么2021-07-30 3489
-
HOOFR-SLAM的系统框架及其特征提取2021-12-21 1737
-
单目视觉SLAM仿真系统的设计与实现2009-04-15 1177
-
高仙SLAM具体的技术是什么?SLAM2.0有哪些优势?2018-05-15 10058
-
Snake-SLAM视觉惯性SLAM系统2022-06-16 679
-
基于视觉传感器的ORB-SLAM系统的学习2022-11-02 1924
-
基于视觉传感器的SLAM系统学习2022-11-29 1347
-
一个动态环境下的实时语义RGB-D SLAM系统2023-08-25 1714
-
一种融合语义不变量的点线立体SLAM系统2023-09-01 1780
-
深度解析深度学习下的语义SLAM2024-04-23 2335
-
利用VLM和MLLMs实现SLAM语义增强2024-12-05 2754
全部0条评论

快来发表一下你的评论吧 !
