

机器人DWA算法程序实现案例
机器人
553人已加入
描述
动态窗口法概述
DWA是一种基于速度的局部规划器,可计算达到目标所需的机器人的最佳无碰撞速度。
程序实现
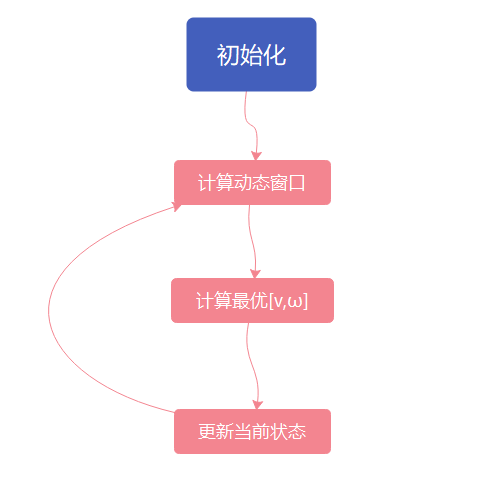
DWA算法主要分三步:
计算动态窗口
计算最优[ v , ω ]
更新机器人状态
流程图如下:
以下代码参考:
https://github.com/AtsushiSakai/PythonRobotics
初始化机器人状态、目标位置、障碍物位置
# 初始化机器人状态 [x(m), y(m), yaw(rad), v(m/s), omega(rad/s)] x = np.array([0.0, 0.0, math.pi / 8.0, 0.0, 0.0]) # 目标位置 [x(m), y(m)] goal = np.array([gx, gy]) # 障碍物位置 [x(m), y(m)] ob = np.array([[-1, -1], ...... , [13.0, 13.0]])
获取动态窗口
这个动态窗口就是机器人在当前状态下能达到的速度v 和转速ω范围,受到自身机械特性以及当前状态的影响。
def calc_dynamic_window(x, config): """ calculation dynamic window based on current state x """ # Dynamic window from robot specification Vs = [config.min_speed, config.max_speed, -config.max_yawrate, config.max_yawrate] # Dynamic window from motion model Vd = [x[3] - config.max_accel * config.dt, x[3] + config.max_accel * config.dt, x[4] - config.max_dyawrate * config.dt, x[4] + config.max_dyawrate * config.dt] # [vmin, vmax, yaw_rate min, yaw_rate max] dw = [max(Vs[0], Vd[0]), min(Vs[1], Vd[1]), max(Vs[2], Vd[2]), min(Vs[3], Vd[3])] return dw
计算最优[ v , ω ]
def calc_control_and_trajectory(x, dw, config, goal, ob):
"""
calculation final input with dynamic window
"""
x_init = x[:]
min_cost = float("inf")
best_u = [0.0, 0.0]
best_trajectory = np.array([x])
# 计算动态窗口内所有的采样样本的代价函数
for v in np.arange(dw[0], dw[1], config.v_reso):
for y in np.arange(dw[2], dw[3], config.yawrate_reso):
trajectory = predict_trajectory(x_init, v, y, config)
# 计算代价函数
to_goal_cost = config.to_goal_cost_gain * calc_to_goal_cost(trajectory, goal)
speed_cost = config.speed_cost_gain * (config.max_speed - trajectory[-1, 3])
ob_cost = config.obstacle_cost_gain * calc_obstacle_cost(trajectory, ob, config)
final_cost = to_goal_cost + speed_cost + ob_cost
# 寻找具有最小代价的样本以及它的轨迹
if min_cost >= final_cost:
min_cost = final_cost
best_u = [v, y]
best_trajectory = trajectory
return best_u, best_trajectory
更新状态
根据最优u = [ v , ω ] 更新机器人状态
x = motion(x, u, config.dt)
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 机器人
-
DWA算法简介2021-09-15 2700
-
如何实现移动机器人的设计?2020-11-23 3269
-
写字机器人程序2020-10-17 35509
-
【Toybrick RK3399Pro AI开发板试用体验】机器人自主导航2019-08-21 4879
-
机器人基础书籍2019-05-22 3625
-
服务机器人是如何实现自主定位导航的?2018-10-10 3261
-
分享:人工智能算法将带领机器人走向何方?2017-08-16 6018
-
《机器人设计与实现》——低成本DIY机器人,一本机器人制作的经典入门书2017-08-01 194144
-
辰汉-如何实现服务机器人的运算与控制2017-06-09 2970
-
智能搬运机器人2016-03-24 8081
-
什么是工业机器人2015-01-19 6815
-
智能清洁机器人2013-11-08 9
-
机器人系统程序应怎样选择算法?2013-06-05 2003
-
机器人足球识别算法研究2012-08-20 3423
全部0条评论

快来发表一下你的评论吧 !
