

机器人控制器如何给模拟输出端赋值V4.8
机器人
描述
KRC…中32个模拟输出值在-1.0…+1.0之间,对应于电压±10V。如果输出值超过±1.0的限制,则多余的值被去掉。 模拟输入和输出可以通过静态或动态寻址,也就是说,以插补循环速率(通常12ms)连续检测。无论是静态读和写,如同二进制信号的情况,只是简单地分配值,特定指令ANIN 和 ANOUT用于循环处理。 要设置一个模拟通道值,只需简单地将该值分配给$ANOUT变量: $ANOUT[2]=0.5 ;模拟通道2设置为+5V 或 REAL V_GLUE . . . V_GLUE=-0.9 $ANOUT[15]=V_GLUE ;模拟通道15设置为-9V 这些分配是静态分配,该通道的值只有在相关的$ANOUT[ No]系统变量重新分配一个新值后才会改变。
然而,对于在程序执行期间以定义的循环速率需要连续重复计算的模拟输出,可使用ANOUT语句执行动态模拟输出功能,使用的指令如下 ANOUT ON WIRE=0.8*V_WIRE 您可以通过信号变量WIRE来改变该模拟输出,例如,简单地给变量V_WIRE分配一个值。对应的输出电压由变量V_WIRE来决定。 变量WIRE必须首先在SIGNAL声明中声明,例如: SIGNAL WIRE $ANOUT[2] Using ANOUT OFF WIRE 循环的模拟输出功能结束。 指定计算模拟循环变化的表达式,千万不要过于复杂。允许的语法是受限制的和适应工艺的。完整的语法是:  开始循环模拟输出功能,或
开始循环模拟输出功能,或  结束该功能。
结束该功能。
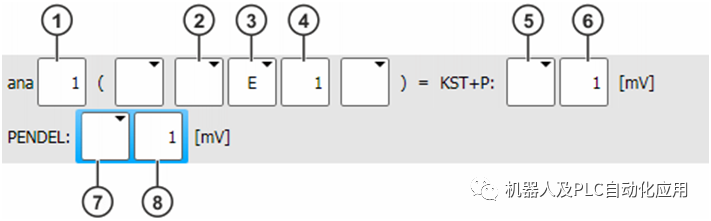
| Signalname | REAL | 指定模拟输出的信号变量(必须用SIGNAL声明)。不允许直接指定$ANOUT[No]。 |
| Factor | REAL | 任何因素,可以是变量、信号名或常数。 |
| Controlelement | REAL | 影响模拟输出的控制元素。可以是变量或信号名。 |
| Offset | REAL | 作为控制元素,可随意编程的偏置。该偏置必须是常数 |
| t | REAL | 使用关键字DELAY,以秒为单位输入一个正的或负的时间数量,则循环计算的输出信号可随意被延迟(+)或提前(-)。 |
| U1 | REAL | 关键字MINIMUM定义输出的最小电压。允许的值是-1…1.0(对应-10V…10V)。如果两个值都使用则最小值必须小于最大值。 |
| U2 | REAL | 关键字MAXIMUM定义输出的最大电压。允许的值是-1…1.0(对应-10V…10V)。如果两个值都使用则最大值必须大于最小值。 |
选项参数“Minimum”和“Maximum”在inline格式中不允许使用,因为对于”“胶接焊”工艺来说这些是专用的。 在这个例子中,定义了最小和最大值。输入值为“MINIMUM=0.3”和“MAXIMUM=0.95”。
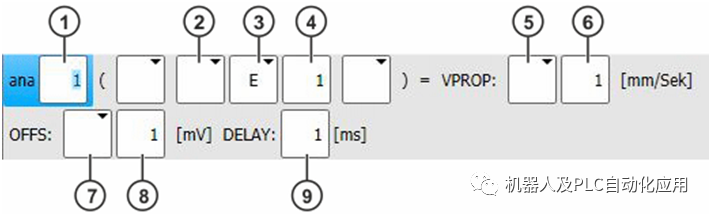
通过给模拟输出端赋值,可通过机器人控制器输出模拟电压。具体则可根据应用情况而定对以下模拟输出端赋值: • ana=KONST:输出稳态电压值的模拟输出端,例如,在给粘结剂进行配量时 • ana=Vprop:输出和速度成正比的电压值的模拟输出端,例如,用于气体保护焊时的参数设定 • ana=KST+P:模拟输出端输出一个与摆动位置有关的电压值,例如,用于点焊钳的阶梯式压力控制 机器人控制系统可以管理16 个模拟输入端和16 个模拟输出端。输入端或输出端是在控制设备PC 里通过KUKA 总线卡来实现控制的。配置是按用户要求而定的。 模拟输入/输出端允许的数值范围:-1.0 至+1.0。该值相当于电压范围-10 V 至 +10 V。如果超过该值,则输入/输出端会采用最大值并显示一条信息,直至数值又回到允许范围内。 行指令 ana=KONST

指令给一个模拟输出端赋值,使之用于输出静态电压值。输出端的赋值可与一项条件关联。 示例:

在满足以下条件时,模拟输出端 3 给出 1 000 mV :标记 21 为 TRUE。 行指令 ana=Vprop 指令给一个模拟输出端赋值,使之用于输出动态电压。输出端的赋值可与一项条件关联。 输出的电压在以下数值的影响下可动态发生变化: • 速度 • 偏量 与速度成正比的模拟动作仅在CP运行情况下方可行(LIN, KLIN, CIRC, KCIR)。 ana=Vprop 始终在点上切换,与是否为该点编程 PLC 触发器无关。 视具体的 Delay 值而定,机器人控制系统在程序运行期间决定指令是否被轨迹逼近。通常进行轨迹逼近。在以下情况下执行精确暂停: • 当程序中第一次出现 ana=Vprop时。 • 当 Delay值发生变化时,即程序中不止一次地出现 ana=Vprop且指令的Delay值与下一数值不同。 当 ana=KONST或 ana=KST+P的 后 面 为 ana=Vprop时
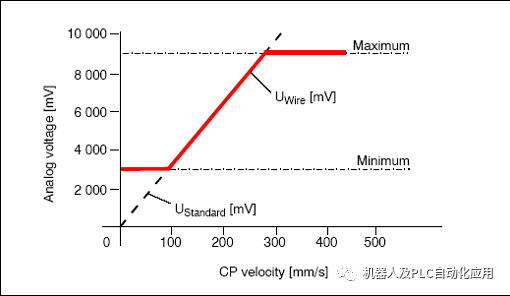
示例 1 在此例中,当速度为500 毫米/秒时最大可能输出的电压值为 10 000mV。

当满足以下条件时,模拟输出将被激活:输入端 16 为FALSE。此模拟输出保持激活状态,直到一个静态模拟输出将其关闭为止(ana=KONST 或 ana=KST+P) 。
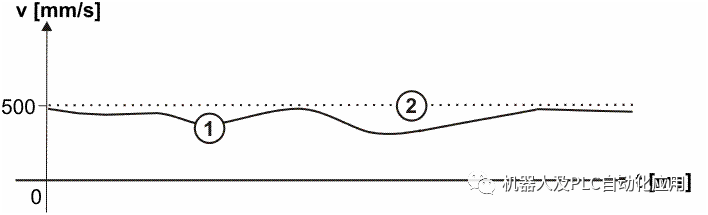
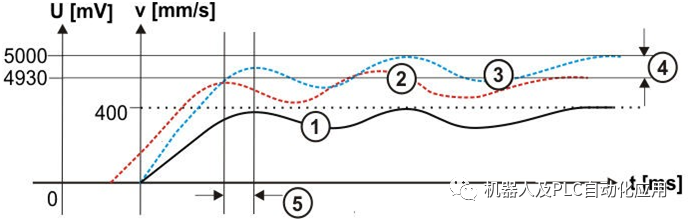
1 当前机器人速度 2 最高电压输出时的机器人速度 示例 2 此例中为进行最佳的粘合应用,当机器人速度为 400 毫米/秒时需要5 000 mV 的模拟电压。测试表明,当偏移量为 -70 mV 时,粘合控制装置内部模拟数值方才达到 0 V。

所需的 5000 mV 将在机器人速度为 400 毫米/秒时由模拟输出端输出。为达到最大可能的10 000 mV 电压,机器人必须以 800 毫米/秒的速度移动。此速度必须输入行指令中.
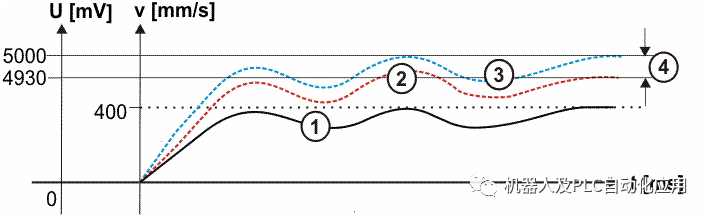
| 1 | 当前机器人速度 |
| 2 | 模拟输出端上的电压:4 930 mV |
| 3 | 所需的模拟输出端电压:5 000 mV |
| 4 | 偏移量:-70 mV |
示 例 3

在此例中,当偏移量为-70 mV 时,粘合控制装置比机器人先启动 85 毫秒。
1 粘合控制装置 2 模拟输出端上的电压:4930mV 3 所需的模拟输出端电压:5000mV 4 偏移量:-70mV 行指令 ana=KST+P 当机器人动作轨迹和摆动动作路线重叠时,将用到该指令。用此指令可以为用于输出电压的模拟输出端赋值,其电压值取决于摆动振幅上的摆动位置。输出端的赋值可与一项条件关联。
示例

当满足以下条件时,模拟输出将被激活:输入端 1 为“TRUE”。输出的电压在2 750 mV 和 4 250 mV 之间,并取决于摆动的当前位置.
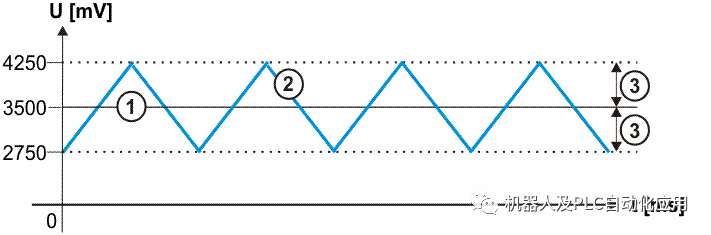
1 静态电压 2 模拟输出端上的电压:三角形摆动图形 3 电压或者摆动图形的振幅
编辑:黄飞
-
蓝牙控制机器人端2013-07-20 4795
-
机器人舵机的作用2014-08-22 8389
-
智能小车机器人控制端V2.022015-04-12 6671
-
企鹅机器人是怎么样的?2016-03-29 4310
-
如何设计智能灭火机器人控制器?2019-07-31 3969
-
工业机器人控制器有什么功能?2019-09-12 3431
-
机器人的控制系统2021-09-13 1973
-
机器人是什么?2022-03-31 22303
-
相扑机器人控制器资料分享2022-06-28 1100
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 2601
-
机器人控制器有哪些类型_机器人控制器发展2019-10-14 13265
-
常见的机器人控制器2020-08-18 8398
-
概述KUKS -ANOUT的循环说明模拟输出端2021-05-08 3315
-
KUKA-VASS大众版本:给模拟输出端赋值2023-06-05 1739
-
海默RC系列机器人控制器2025-08-01 1490
全部0条评论

快来发表一下你的评论吧 !
