

无人机禁飞区如何进行三维重建 |手持激光雷达手持SLAM
电子说
1.4w人已加入
描述
在大范围测绘场景下,无人机作业已经成为主流手段。但在部分禁飞或难以起飞的区域,如机场周边、密集城区、敏感建筑周围等特殊区域,就需要其他替代采集手段。
传统方式主要采用架站式仪器,数据获取过程多为单点式采集,耗时耗力。后处理时,需要多段数据拼接校正,过程冗长。

灵光Lixel L1采用视觉、激光及惯导融合建模手段,边采集边建模,无需后解算,采集后即时直出通用 LAS 格式结果,后处理方便高效,是禁飞区采集的高效手段。
- 采集实例-
西南某机场周边区域
测区由于临近机场,处于无人机禁飞区。整体面积约 0.4 平方千米,区域覆盖农田、电网、公路及住宅等环境。

客户采用灵光Lixel L1+RTK套件的方式,对该区域进行三维数据采集及建模。采集过程中,通过预览界面的实时点云及轨迹来判断工作情况及数据质量。
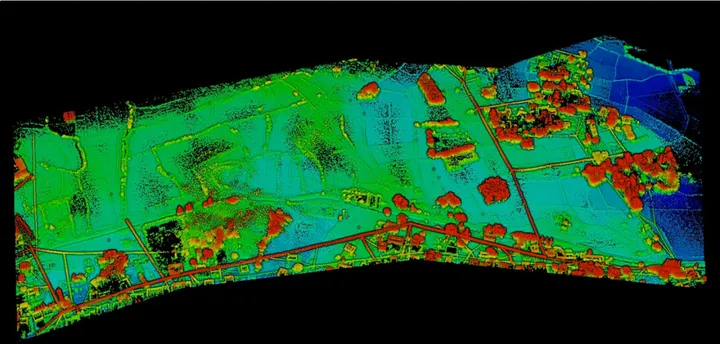
采集结束后,通过后处理软件LixelStudio进行全局优化,获取有绝对坐标的三维数据,并生成DEM/DSM等数据结果。
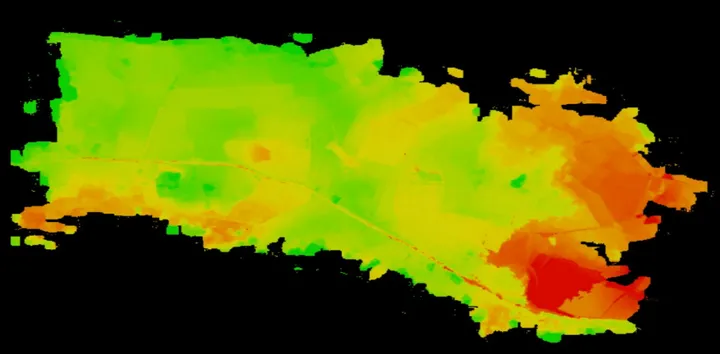
▲DEM
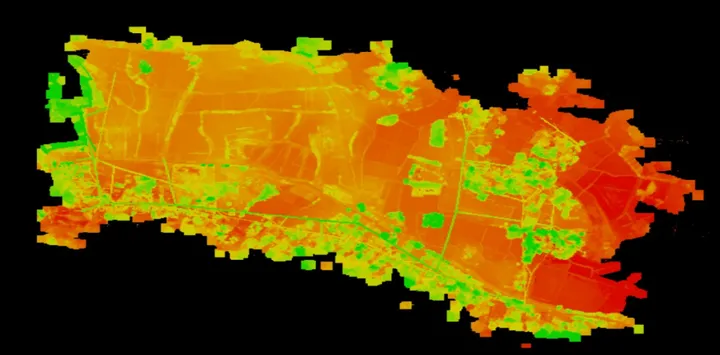
▲DSM
经验证,数据平面及高程误差均在5厘米以内,满足客户需求。
灵光Lixel L1采用视觉、激光、惯导Mutil-SLAM算法,兼顾采集效率及采集精度,后处理便捷高效,在城市、室内、地下及航空器禁飞区域等环境下,有极为明显的优势。
Ps:
灵光Lixel L1不仅可以手持作业,也可以搭载在无人机上,既有精度,也有效率。真是上天入地无所不能了呢~
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何实现整个三维重建过程2023-09-01 2769
-
中国最大测绘地信展会,其域创新重新定义手持激光雷达、手持SLAM设备2023-04-27 2903
-
深度学习背景下的图像三维重建技术进展综述2023-01-09 4091
-
其域创新手持激光雷达手持SLAM灵光Lixel,为地下停车场进行三维建模2023-01-05 4477
-
其域创新手持激光雷达/手持SLAM如何助力城市更新?2023-01-04 2376
-
其域创新手持激光雷达/手持SLAM其域灵光Lixel重建深圳规划馆2022-12-29 1152
-
无人机三维建模的信息2021-09-16 2200
-
怎样去设计一种基于RGB-D相机的三维重建无序抓取系统?2021-07-02 2080
-
浅析面向图像三维重建的无人机航线规划2021-04-06 5552
-
无人机图像处理技术之三维还原重建技术简介2021-03-24 8029
-
山西手持式无人机反制设备打击违法行为2020-08-11 1142
-
汽车整车三维扫描有手持式蓝光扫描仪就够啦!2019-10-20 8223
-
AGV激光雷达SLAM定位导航技术2018-11-09 10025
-
无人机搭载激光雷达的效率2018-06-14 8165
全部0条评论

快来发表一下你的评论吧 !
