

智能车浅谈—手把手让车跑起来(电磁篇)
描述
之前智能车系列已经做了一个比较详细的解析,但是美中不足是知识点被拆的太零散,可能对于新手来说不太友好,所以借着有空就再写一点能让车跑起来的方案。
当然,也就仅仅限于可以跑起来,元素以及高级算法就需要车友们自己去整了,主要还是方便新手上道,当然也欢迎大佬们提出建议。本文以电磁四轮为例进行讲解。
材料准备
作为刚接触电磁车的同学,咱们要想跑起来需要四大件,车模、电磁及运放模块、主控及母板、电机驱动;
这里笔者打算分成两种组别来推荐方案,一类是手头没有现成车模而且不是今年参赛的练习组,另外一类是今年的参赛组。
备赛组
1.车模
这里以基础电磁四轮组为例,建议使用C车模,B车的傻蛋5舵机以及机械差速还是有些许的头秃,当然官方今年好像已经宣布了换掉SD5舵机,由于C车是双电机可以使用主动差速,所以建议大家上手选择C车。
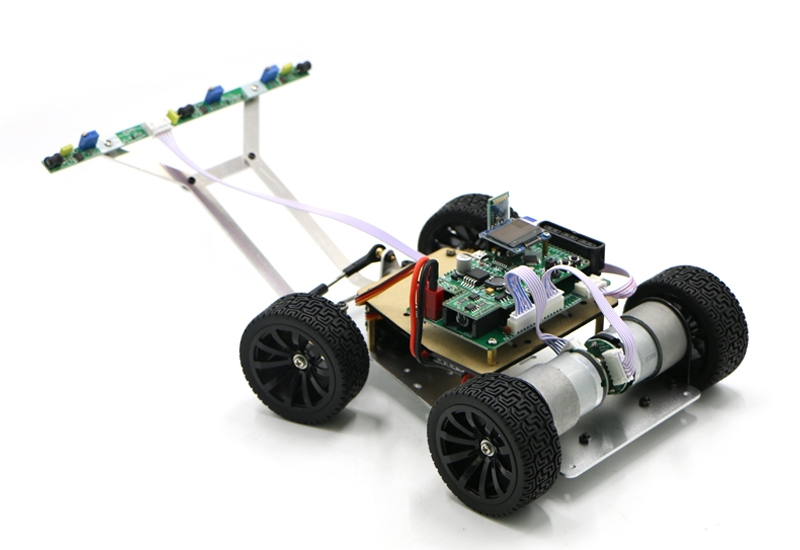
车模的机械结构搭建可以去参考往届优秀队伍的技术报告,至于怎么找到技术报告,比赛官网有,卓大博客也有—第十六届全国大学智能车竞赛技术报告与总决赛视频下载。借用逐飞科技的示例车来展示一下:
2.硬件
主控:电磁车今年参赛要求是使用STC的单片机来参赛,所以就可以选购龙邱或者逐飞STC母板来作为主控;
电机驱动:目前比赛常用的有HIP4082、DRV8701、BTN7971或者IR系列加MOS全桥等;
电磁组所需的电感和运放模块:目前较多的是OP2350、LM358、OPA4377等;
电源模块:整个小车系统所需的电源种类一般是5V、3.3V、12V,需要有一个系统的电源管理方案,这个需要积累,BUCK、BOOST的电路,网上方案也很多,笔者之前使用的是德州仪器的TPS系列。
硬件设计的注意事项可以参考笔者抗干扰技术的那篇博客。
练习组
1.车模
对于不是急于参赛而是平时训练的练习组,手头如果没有现成的车模和往届的方案的,建议去淘宝找平价车模代替,因为自己一套买下来得个大几千块,都是学生党,这也不是个小数目。
可以参考下图这种使用舵机转向而且后轮电机带编码器的车模,加上锂电池这些一套下来300左右。(图片来源于某宝,VANBOT教育机器人自营店)

由于原理都差不多一样的,练习使用这种车模性价比极高,而且还可以留下来参加其他的比赛。
2.硬件方案
电机驱动:购买了这种车模的同学也可以直接用配套的电机驱动,或者使用L298N、TB6612这些电驱都可以。
主控:建议使用带片内ADC的主控,STM32,STC32、STC16、MSP430都可以反正选一个自己熟悉的就行了。
电磁传感器:可以购龙邱、或者轮趣科技的。
电源:选用两节18650加一个LM2596的降压模块即可。
如果觉得麻烦,可以直接选购轮趣科技的学习版小车,如下图:
当然,手头有往届的芯片和方案更好,这样可以无缝衔接到比赛,比如K66、K60这些方案只是现在不用了,但是网上资料多啊,而且这些处理器性能拿来练手绰绰有余。
整车原理
在准备好上面的硬件后,再来捋一下整个小车的运行原理。
小车要正常行驶在赛道上,必定是需要实时根据赛道的状态来调整车身姿态的,那么,电磁车是怎么样获取到赛道信息,又是怎样实现转向的呢。
赛道信息获取及转向原理
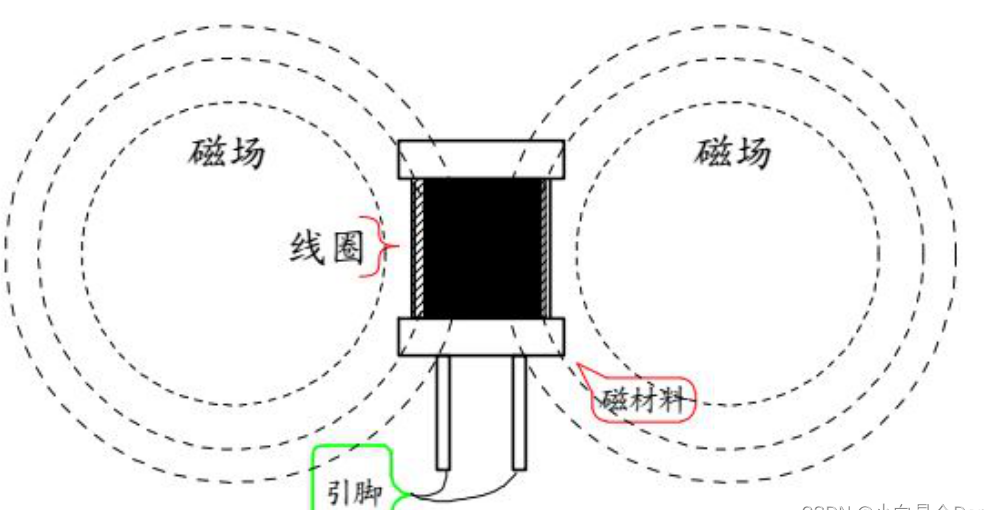
1.工字电感
电磁车是通过获取赛道信号发生器产生的信号来来获取赛道信息的,在赛道正中间会有一条磁感线,用来产生交变电磁信号。
小车通过前瞻上的电感即可获得到赛道信息,为啥可以电感可以获取赛道信息呢,其实很好理解,电磁感应都映像吧,导体切割磁感线会产生感应电动势,工字电感内部的导线切割信号线产生的磁场,在电感引脚就会有感应电动势。
电感距离磁场越近,产生的感应电动势越大,距离越远,产生的感应电动势越小。
(有关电感配频以及信号在各个节点的状态可以去笔者的硬件篇查看)。
2.运放模块
经过工字电感产生的感应电动势是交流小信号,单片机是无法采集和处理这种小电压的交变信号
所以需要在后面增加一个峰值检测以及放大的运放电路,将交变信号进行选频、检波然后放到适当倍数,输出单片机ADC可以采集的直流信号,将感应电动的大小转换成为单片机ADC采集的数字作为输入量。
3.转向原理
了解了单个电感获取赛道信息的原理后,为了让小车能够在赛道上行驶,至少会使用左、右两个电感,通过ADC采集经过运放处理的感应电动势值来计算偏差。
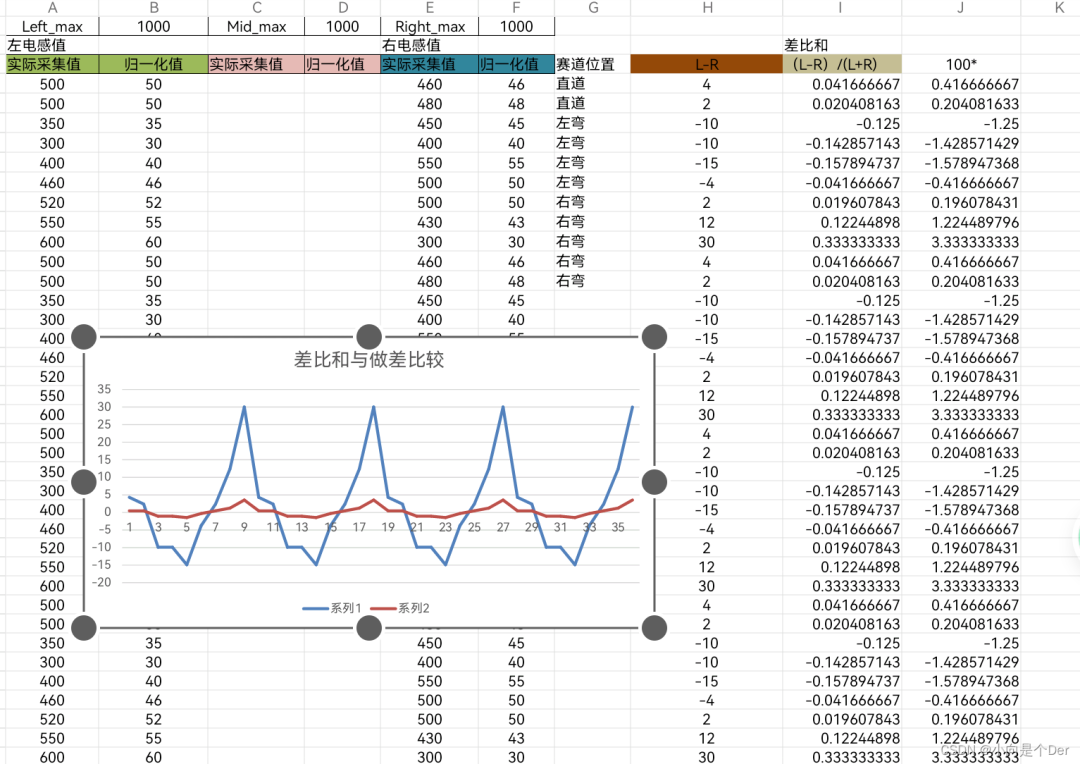
方法是直接左右电感采集值之差(或者差比和计算)来判断赛道信息,将差比和计算出来的偏差以一定的比例关联到舵机的pwm占空比来控制舵机打角,进而控制小车进行转向。参考下表
其中系列1是左右电感直接作差的波形,系列2是经过差比和计算出来的波形,可见系列2的波形比系列1更加平滑,这有利于控制系统的跟随。
具体原理:
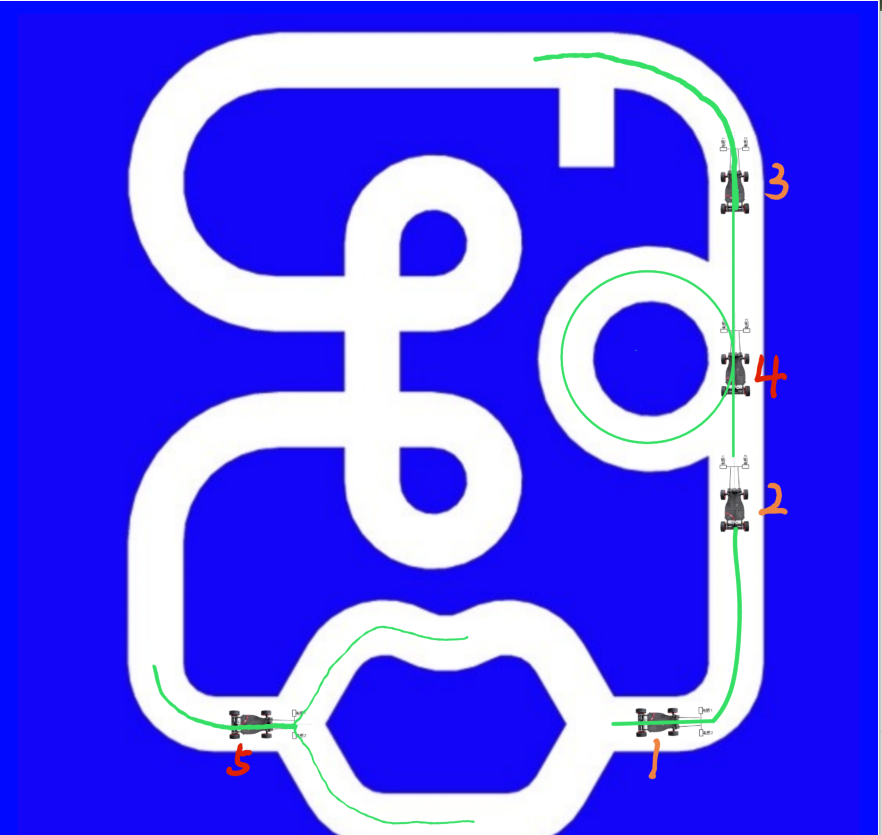
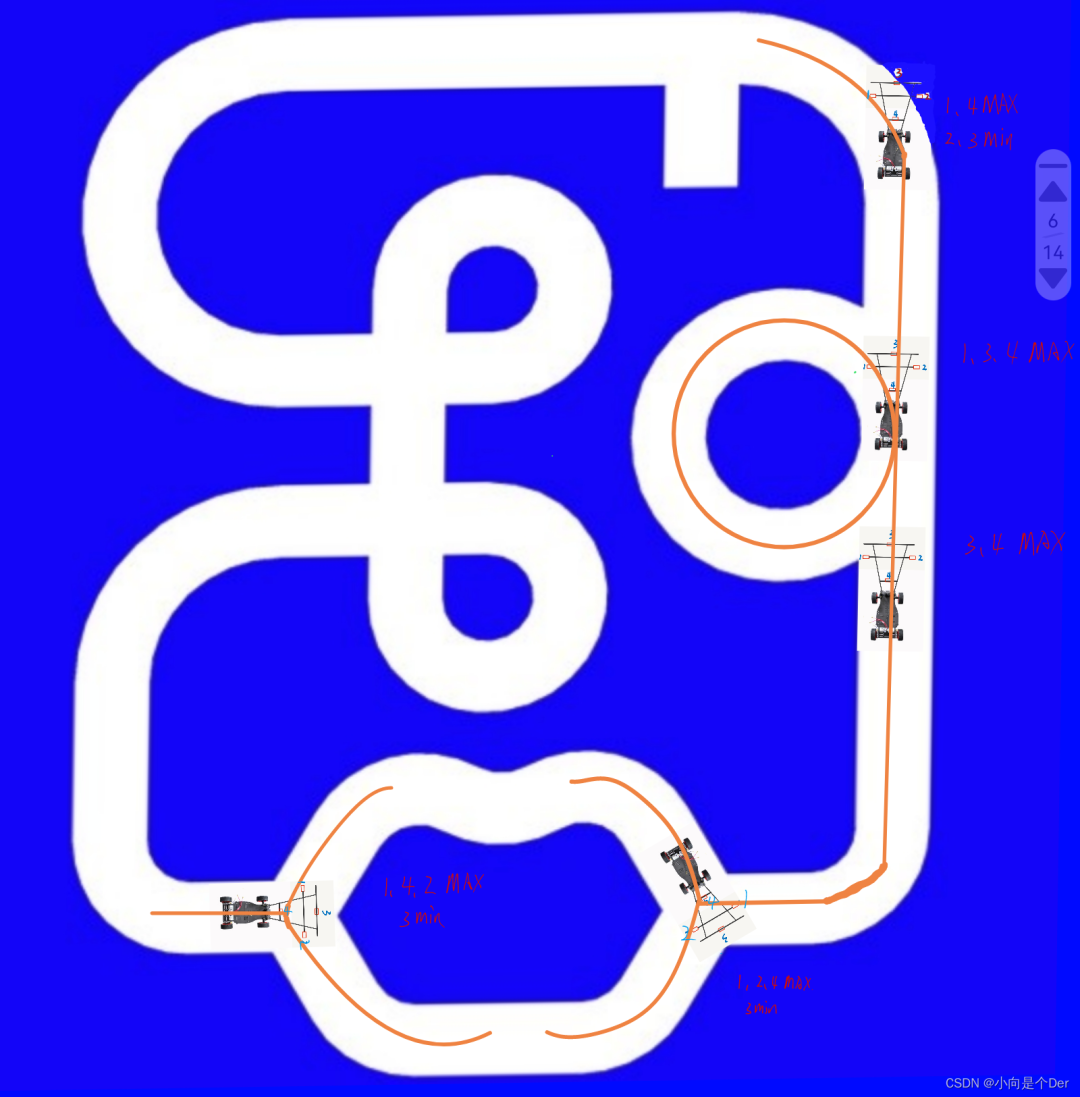
如下图,小车位于2号位置时,左右两个电感距离信号的距离一样,周围磁场强度也基本一致,产生的感应电动势也是大差不差,左右电感值差比和计算出来的偏差也是0,舵机位于正中间,保持小车直行。
小车位于3号位置时,由于弯道,左边电感距离信号线近,磁场更强,产生的感应电动势要大于右电感的感应电动势,左右电感差比和计算偏差就很大了,将这个偏差输出到舵机,让小车左转来消除这个偏差。
当小车遇见右转赛道时,两个电感的状态刚好相反,此时需要右转来抵消二者偏差。
详细描述参考此文:
https://blog.csdn.net/weixin_43788952/article/details/105151921?utm_source=app&app_version=5.2.1&code=app_1562916241&uLinkId=usr1mkqgl919blen
4.元素判断
从此图可以看出理论上小车在经过三叉、环岛和十字时,左右两个电感的电感值都会接近磁感线,检测这个特征就可以识别到了,为了防止误判还可以增加一个中间电感或者斜放置电感来辅助判断。
电感只有线圈切割磁场时才能产生感应电动势,线圈和磁场平行时是没有感应电动势的,但是在这些特殊元素是,原本没有切割磁场的电感可能突然就切割了磁感线,这里留给大家自己去发挥。
此处提供一个思路,直接看图:
电机及舵机控制原理
舵机和电机都是通过PWM来控制的,只不过舵机控制的PWM的频率是固定的(50-60HZ),通过改变占空比来实现打角角度。
而电机的频率没有指定范围,但速度也是通过调节占空比来控制的,通过调节电机pwm输出占空比完成对电机速度的调整,电磁组需注意电机对电磁信号会有干扰。
建议电机控制的pwm频率设置为13-19khz,以尽可能的消除干扰。
具体的PWM控制原理以及H桥的讲解之前已经写过了,需要的同学去前面方向篇和电机控制篇查看。
代码实现
在了解了上述原理后,我们就可以开始写程序控制我们的小车,实现一个可以跑的状态了。
首先,综合上面的原理,需要初始化PWM来控制舵机和电机,其中舵机的PWM使用的是50-60hz的pwm进行控制(笔者用的50HZ进行控制),而电机的频率是13-19Khz。
然后是获取赛道信息的ADC,需要至少开启两路来实现信息采集。
还有为了保证系统的计算和输出周期固定,需要开启一个定时器中断来保证输出的周期稳定。
其他:根据自己的需求初始化IO控制屏幕,按键,蜂鸣器LED灯。
有了这个思路,任何一款处理器都可以实现功能了。笔者这里以STC为例。
框架:
以下代码仅供参考, 仅仅是代码框架 不能直接复制编译!!!
void main()
{
//按照对应芯片进行上述内容的初始
DisableGlobalIRQ(); //关闭总中断
board_init();
// lcd_init(); //1.8寸TFT初始化
/****电机初始化***/
pwm_init(PWMA_CH1P_P60, 10000, 0); //初始化PWM5 使用引脚P2.5 输出PWM频率10000HZ 占空比为百分之 pwm_duty / PWM_DUTY_MAX * 100
pwm_init(PWMA_CH2P_P62, 10000, 0); //初始化PWM5 使用引脚P2.5 输出PWM频率10000HZ 占空比为百分之 pwm_duty / PWM_DUTY_MAX * 100
pwm_init(PWMA_CH3P_P64, 10000, 0); //初始化PWM5 使用引脚P2.5 输出PWM频率10000HZ 占空比为百分之 pwm_duty / PWM_DUTY_MAX * 100
pwm_init(PWMA_CH4P_P66, 10000, 0); //初始化PWM5 使用引脚P2.5 输出PWM频率10000HZ 占空比为百分之 pwm_duty / PWM_DUTY_MAX * 100
/***电磁初始化***/
adc_init(ADC_P00, ADC_SYSclk_DIV_2); //初始化ADC,P1.0通道 ,ADC时钟频率:SYSclk/2
adc_init(ADC_P01, ADC_SYSclk_DIV_2); //初始化ADC,P1.1通道 ,ADC时钟频率:SYSclk/2
adc_init(ADC_P05, ADC_SYSclk_DIV_2); //初始化ADC,P1.2通道 ,ADC时钟频率:SYSclk/2
adc_init(ADC_P06, ADC_SYSclk_DIV_2); //初始化ADC,P1.2通道 ,ADC时钟频率:SYSclk/2
//****舵机初始化*****21.12.19/
Steering_Init(50,Steering_Duty); //舵机初始化,PWM频率为50HZ
/*****编码器出初始化***/
ctimer_count_init(CTIM0_P34); //初始化2个编码器
ctimer_count_init(CTIM3_P04); //初始化2个编码器
gpio_pull_set(P7_7,PULLUP);
BeeOff;
pit_timer_ms(TIM_4, 5); //使用TIMER作为周期中断,时间5ms一次
EnableGlobalIRQ(); //开启总中断
while(1) //电机1
{
//可以放显示、按键操作这一类没有严格时序要求的。
//pwm_init(PWMB_CH1_P74,freq,1350); //PWMA初始化
//屏幕显示:
// lcd_showstr(0,0,"L:");
// lcd_showuint16(5*8,0,L);
// lcd_showstr(0,1,"M:");
// lcd_showuint16(5*8,1,M);
// lcd_showstr(0,2,"R:");
// lcd_showuint16(5*8,2,R);
// lcd_showstr(0,3,"dutyL:");
// lcd_showuint16(5*8,3,dutyL);
// lcd_showstr(0,4,"dutyR:");
// lcd_showuint16(5*8,4,dutyR);
// lcd_showstr(0,5,"error:");
// lcd_showuint16(5*8,5,error);
//
// delay_ms(10);
}
}
//定时器中断
void TM4_Isr() interrupt 20
{
TIM4_CLEAR_FLAG; //清除中断标志
//电感采集获取赛道信息,三电感 \ 000 000 000 //
L=adc_once(ADC_P00, ADC_10BIT);
M=adc_once(ADC_P01, ADC_10BIT);
R=adc_once(ADC_P05, ADC_10BIT);
My_Direction.NowError=50*(R-L)/(L+M+R);//差比和计算偏差
//方向环
Direction_Out();
//***电机控制***//
if(DIR1 == 1)//读取编码器方向
{
speed1 = 2*ctimer_count_read(CTIM0_P34);//
}
else
{
speed1 = 2*ctimer_count_read(CTIM0_P34) * -1;
}
ctimer_count_clean(CTIM0_P34);
if(DIR2 == 1) //输出高电平,正转
{
speed2 = 2*ctimer_count_read(CTIM3_P04)* -1;
}
else //输出低电平,反转
{
speed2 = 2*ctimer_count_read(CTIM3_P04) ;
}
ctimer_count_clean(CTIM3_P04);//清除积累
Current_speed=(speed1+speed2)/2;
Current_speed=Current_speed*20.4/(2355.2*0.02);//速度=脉冲数*周长/2368*周期;
//电机PI控制
error=(int)(speed-Current_speed);
duty=duty+(error-error_pre)*Motor_P+error*Motor_I;
error_pre=error;
if(duty>=100) duty=100;
else if(duty<=-100) duty=-100;
//电机动作 单极控制
pwm_duty(PWMA_CH2P_P62, 0);
pwm_duty(PWMA_CH1P_P60, dutyL*12);
pwm_duty(PWMA_CH4P_P66, 0);
pwm_duty(PWMA_CH3P_P64, dutyR*12);
}
需要完整代码的同学去笔者的资源自行下载,也可以去文末链接找完赛代码。
效果欣赏

总结
有关电磁车的介绍就到此为止,这篇主要是串了一下整个车的思路,细节还需要去看笔者之前的介绍。
文章如有不足欢迎指出,祝大家的小车可以拿到满意的成绩,笔者在评论区等待你们赛后的分享。
审核编辑 :李倩
- 相关推荐
- 热点推荐
- 智能车
-
智能车电磁组——基本控制篇2025-05-20 4145
-
智能车浅谈——手把手让车跑起来(电磁篇)2025-05-22 3442
-
手把手教你从零开始用labview编写智能车上位机程序.rar2012-08-26 74628
-
智能车设计基础2012-10-21 4831
-
手把手教你学FPGA 编程规范篇2018-02-02 5018
-
第十五届智能车入门浅谈 精选资料分享2021-07-28 2010
-
基于单片机的智能车设计2021-09-02 1199
-
智能车制作相关资料分享2022-01-17 1512
-
如何让u-boot跑起来?2022-01-26 1861
-
智能车竞赛浅谈——图像篇2022-09-24 46779
-
关于智能车的优秀论文(43篇论文)2015-11-13 1489
-
手把手教你学习FPGA—LED篇2016-08-08 1022
-
手把手教你学LabVIEW视觉设计2019-03-06 3653
-
FreeRTOS_003 _让系统在板子上跑起来2020-03-14 4023
-
电磁智能车原理2022-12-13 6373
全部0条评论

快来发表一下你的评论吧 !
