

ASUS Tinker Board 2S新版Debian 10 V2.0.3系统与相依套件安装
电子说
描述
ASUS Tinker Board 2 / 2S 推出至今,搭配Debian操作系统操作的版本也从先前介绍的2.0.0版更新到了2.0.3版,这次华硕IoT团队更新了Debian操作系统的内容,这次更新的内容强化了通讯的功能、周边接口存取的功能,相关的更新内容请参考下表:
https://tinker-board.asus.com/download-list.html?product=tinker-board-2s
1. Fix OV5647 mirror issue
2. Fix ufw and iptables not working inDebian 10
3. xfce4-power-manager: set blank after to“never”
4. Add auto_ums config in config.txt
5. Add modem manager
6. Add ASUS.GPIO library for Python 3
7. Support Quectel EM06-E LTE module
8. Support USB to Serial Chip CH934X
9. Support WinChipHead CH340/CH341
10. Add support for ASUS API
11. Enable CONFIG_TUN kernel config
12. Power Manager add support for GPU configuration
13. Fix Debian apt-get repo issue
14. Fix UART0 RTS not working
本文将主要说明各种常用的Python相依套件程序安装流程,也透过本篇的内容强化即将使用Tinker Board 2S进行各种项目开发的朋友,有更多可以参考的文件,这些Python相依套件基本上都已经过各种范例的实测,在目前最新发表的Debian-10 2.0.3版操作系统都是可以正常操作。
本次的安装介绍主要是针对新版核心(Debian-10 2.0.3版)进行安装,相关安装流程与较旧版本核心的安装流程略有差异,若是新版核心建议还是按照本篇教学进行安装,以确保相关的套件流程都可以正确安装与执行。
本文将会针对以下这些AI应用程序设计中常用的套件程序安装进行说明:
1. nano (用于简易文本编辑器操作)
2. OpenCV 4.5.0 (用于相关视觉影像的接口操作)
3. imutils (用于视觉图像处理的接口操作)
4. pillow (用于视觉图像处理的接口操作)
5. tkinter (用于图形用户界面 GUI 程序设计)
6. Tensorflow 2.4.1 与Tensorflow-Lite Runtime 2.5.0 (用于神经网络运算)
7. SciKit-Learn (用于神经网络运算)
8. mediapipe(用于各种人体肢体或表情变化侦测操作)
9. pygame(用于各种多媒体游戏或媒体拨放功能操作)
10. AudioPlayer、Playsound(用于拨放mp3或wav音讯档案)
11. I2C接口与PCA9685电路驱动(用于周边电路的控制)
一、安装简易文本编辑器nano
由于在许多的终端机操作环境下需要快速编修文件,采用精巧且功能完整的 nano 文本编辑器,一直是许多系统操作者的最爱之一,以下说明安装流程:
sudoapt-get update
sudoapt-get upgrade
sudoapt-get install nano
二、安装GTK-2.0相依套件libgtk2.0-dev
本次安装测试的过程当中,在安装OpenCV 4.5.0套件程序时,发生了相依套件断裂的问题,在Tinker Board 2S的Debian 10 Linux系统中因为没有安装GTK-2.0 的libgtk2.0-dev套件程序,这将导致在OpenCV4.5.0因cmake无法将 libgtk2.0-dev相依套件进行编译设定,虽然在后续的make流程都能完成,但最后会在最后Python程序运行时间无法正确使用如imshow、putText等画面显示或绘图的函数,并且会在运行时间报错,并且提示需要重新进行cmake。
为了将libgtk2.0-dev相依套件程序安装至系统,笔者初期使用sudo apt-get install libgtk2.0-dev这种方式安装相依套件程序,但系统却又报错,表示还有许多其他相关相依套件有「相依断裂」的问题,笔者尝试再以sudo apt-get install去安装那些相依套件程序,却依然发现更多的「相依断裂」,更糟糕的是还发生「循环相依」,所谓「循环相依」表示其他的相依套件程序又循环相依libgtk2.0-dev。
为了解决这种「相依断裂」与「循环相依」的问题,最后只能透过额外安装「套件安装设定程序」的方式来解决,本文将透过 aptitude 套件程序来解决这个问题。
透过「aptitude」套件程序便可以进行libgtk2.0-dev套件程序安装,以下说明安装流程:
sudo apt-get install aptitude
sudo aptitude install libgtk2.0-dev
三、安装OpenCV 4.5.0套件
本文使用 OpenCV 4.5.0 来进行视觉影像接口处理,笔者曾尝试以 sudo apt-get install python-opencv 来安装。但经过检查发现,以这种方式安装的OpenCV版本是3.6版,虽然简单Python程序函式还是可以执行,可是当遇到更进阶的函式如DNN等相关进阶应用时,便会产生函数缺漏的问题,有鉴于此,笔者选择重新以Build from Source的方式进行安装。
在这里要特别强调一个重要关键,在安装OpenCV 4.5.0套件程序之前,「一定要」先装好上一步的GTK-2.0相依套件 libgtk2.0-dev,切莫跳过这个重要步骤。
由于OpenCV 4.5.0的安装过程需要大量的内存运作空间以进行后续的make流程,因此必须先行安装虚拟内存的套件程序,并且将虚拟内存设为10240MB,并且将Tinker Board 2S重新启动,以下说明虚拟内存设定流程:
sudo apt-getupdate
sudoapt-get upgrade
#安装dphys-swapfile套件程序
sudoapt-get install dphys-swapfile
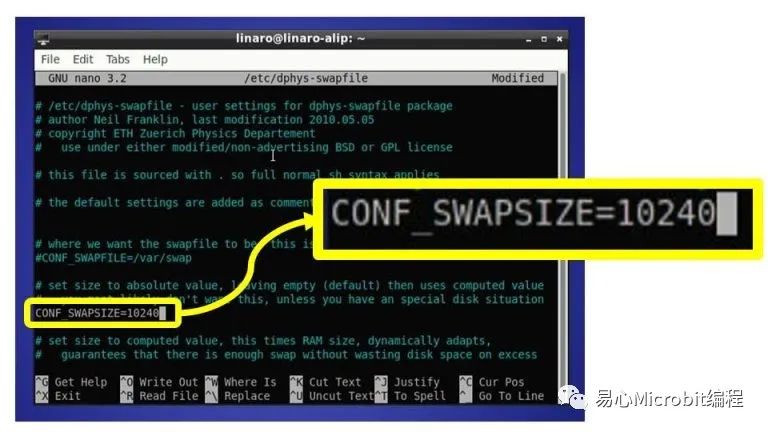
#以nano编辑 /etc/dphys-swapfile配置文件案
sudonano /etc/dphys-swapfile
#寻找#CONF_SWAPSIZE= 字符串内容,并且将批注符号# 取消。
#设定CONF_SWAPSIZE=10240
#离开nano文本编辑器
sudoreboot #重新启动
下载并编译安装OpenCV 4.5.0,请注意,这个阶段的安装时间非常久,笔者大约安装了近4小时,且在make阶段时Tinker Board 2S的散热片会产生高温。笔者使用 make -j4 等多核心编译指令来以加快make流程。另外在编译过程务必确保电源稳定,最好拿电风扇帮忙散热,以确保编译过程顺利完成。以下说明OpenCV 4.5.0的安装流程:
sudoapt-get update
sudoapt-get upgrade
sudoapt-get install cmake git libgtk2.0-dev pkg-config libavcodec-devlibavformat-dev libswscale-dev
sudoapt-get install libjpeg-dev libpng-dev
sudoapt-get install libavcodec-dev libavformat-dev libswscale-dev
sudoapt-get install libgtk2.0-dev libcanberra-gtk* libgtk-3-dev
sudoapt-get install python3-dev python3-numpy python3-pip
sudoapt-get install libtbb2 libtbb-dev libdc1394-22-dev
sudoapt-get install libv4l-dev v4l-utils
sudoapt-get install libopenblas-dev libatlas-base-dev libblas-de
sudoapt-get install liblapack-dev gfortran libhdf5-dev
sudoapt-get install libprotobuf-dev libgoogle-glog-dev libgflags-dev
sudoapt-get install protobuf-compiler
sudoapt-get install qt5-default
wget -Oopencv.zip https://github.com/opencv/opencv/archive/4.5.0.zip
wget -Oopencv_contrib.zip https://github.com/opencv/opencv_contrib/archive/4.5.0.zip
unzipopencv.zip
unzipopencv_contrib.zip
mvopencv-4.5.0 opencv
mvopencv_contrib-4.5.0 opencv_contrib
更新并取得 openCV
cd~/opencv
mkdirbuild
cd build
cmake -DCMAKE_BUILD_TYPE=RELEASE
-D CMAKE_INSTALL_PREFIX=/usr/local
-DOPENCV_EXTRA_MODULES_PATH=~/opencv_contrib/modules
-DENABLE_NEON=ON
-DWITH_OPENMP=ON
-DBUILD_TIFF=ON
-DWITH_FFMPEG=ON
-DWITH_TBB=ON
-DBUILD_TBB=ON
-DBUILD_TESTS=OFF
-DWITH_EIGEN=OFF
-DWITH_GSTREAMER=OFF
-DWITH_V4L=ON
-DWITH_LIBV4L=ON
-DWITH_VTK=OFF
-DWITH_QT=ON
-DOPENCV_ENABLE_NONFREE=ON
-DINSTALL_C_EXAMPLES=OFF
-DINSTALL_PYTHON_EXAMPLES=OFF
-DBUILD_NEW_PYTHON_SUPPORT=ON
-DBUILD_opencv_python3=TRUE
-DOPENCV_GENERATE_PKGCONFIG=ON
-DBUILD_EXAMPLES=OFF
-DWITH_GTK=ON ..
make -j4
sudomake install
sudoldconfig
makeclean
buildand make
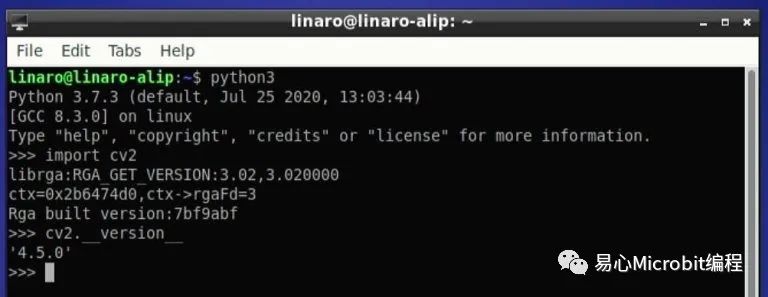
接着要透过 .bashrc 设定OpenCV 4.5.0路径,安装完成OpenCV 4.5.0之后,必须要设定相关执行路径,若跳过这个步骤,会导致Python程序在 import cv2 时产生allocation memory 报错,以下说明 .bashrc 路径设定方式:
cd ~
#以nano文本编辑器编辑 .bashrc配置文件
sudonano ~/.bashrc
#到文件末端将以下叙述补在最后一行
exportLD_PRELOAD=/usr/lib/aarch64-linux-gnu/libgomp.so.1

#执行 .bashrc 内容
source~/.bashrc
四、安装其他视觉图像处理与图形用户界面套件程序
本段要安装多个乘用的图像处理与 GUI 套件
#安装pillow套件程序
cd ~
sudoapt-get update
sudoapt-get upgrade
pip3install setuptools
pip3install pillow
#安装tkinter套件程序
cd ~
sudoapt-get update
sudoapt-get upgrade
sudoapt-get install python3-tk
sudoapt-get install python3-pil.imagetk
#安装imutils套件程序
cd ~
sudoapt-get update
sudoapt-get upgrade
pip3install imutils
五、安装Tensorflow 2.4.1 神经网络运算套件程序
Tinker Board 2S 具有强大的CPU与GPU运算效能,可进行神经网络运算,搭配OpenCV可以进行各种AI影像辨识的应用,依照Tinker Board 2S的各种硬件规格,笔者认为神经网络的框架可采用Tensorflow 2.4.1来进行神经网络的推论(Inference)运算,以下说明套件程序安装流程:
#更新操作系统套件信息
sudoapt-get update
sudoapt-get upgrade
#更新安装pip3套件程序
sudoapt-get install python-pip python3-pip
#移除旧版Tensoflow套件程序
sudo pipuninstall tensorflow
sudopip3 uninstall tensorflow
#安装各种系统相依套件程序
sudoapt-get install gfortran
sudoapt-get install libhdf5-dev libc-ares-dev libeigen3-dev
sudoapt-get install libatlas-base-dev libopenblas-dev libblas-dev
sudoapt-get install liblapack-dev
#安装各种Python3各种套件程序
sudo -Hpip3 install --upgrade setuptools
sudo -Hpip3 install pybind11
sudo -Hpip3 install wrapt
sudo -Hpip3 install termcolor
sudo -Hpip3 install Cython==0.29.21
sudo -Hpip3 install h5py==2.10.0
更新系统套件
#安装下载工具
pip3install gdown
sudo cp~/.local/bin/gdown /usr/local/bin/gdown
#下载Tensorflow2.4.1套件程序安装文件
gdownhttps://drive.google.com/uc?id=1WDG8Rbi0ph0sQ6TtD3ZGJdIN_WAnugLO
#安装Tensorflow2.4.1套件程序
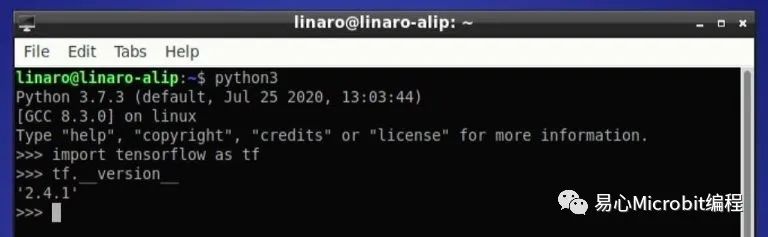
sudo -Hpip3 install tensorflow-2.4.1-cp37-cp37m-linux_aarch64.whl
安装 tensorflow
六、安装Tensorflow-Lite Runtime 2.5.0 套件程序
对于Tinker Board 2S / 2GB而言,由于受限于主存储器仅有2GB的缘故,因此对于神经网络进行推论运算时所需使用的主存储器容量,就必须要谨慎运用这有限的容量,若需要在神经网络推论时有较高的运算效能,往往就必须要选择神经网络模型规模较小的模型格式,在Tensorflow族系里有种Tensorflow-Lite格式就是一种模型规模较小的格式,在Tensorflow的原厂网站里也特别将Tensorflow-Lite格式定义适用于物联网应用场域。
以下说明套件程序安装的方式
cd ~
sudoapt-get update
sudoapt-get upgrade
pip3installhttps://github.com/google-coral/pycoral/releases/download/v2.0.0/tflite_runtime-2.5.0.post1-cp37-cp37m-linux_aarch64.whl
更新系统与安装 tf runtime
使用 tfruntime 执行视觉分类

七、安装其他支持神经运算的套件程序SciKit-Learn
cd ~
sudoapt-get update
sudoapt-get upgrade
sudopip3 install sklearn
八、安装mediapipe Python相依套件
Google mediapipe 是一款非常热门的 ML 套件,把各种视觉辨识变得更简单好用
sudo aptupdate
sudo aptinstall -y python3-dev protobuf-compiler python3-pip git make libssl-dev
sudopip3 install pip --upgrade
sudopip3 install opencv_contrib_python
gitclone https://github.com/PINTO0309/mediapipe-bin && cd mediapipe-bin
./v0.8.4/numpy120x/mediapipe-0.8-cp37-none-linux_aarch64_numpy120x_download.sh
sudopip3 install
cmake-3.20.2-cp37-none-linux_aarch64.whl
numpy-1.20.3-cp37-none-linux_aarch64.whl
mediapipe-0.8-cp37-none-linux_aarch64.whl
sudopip3 install opencv-python dataclasses
安装 mediapipe 与相关套件

mediapipe – facemesh
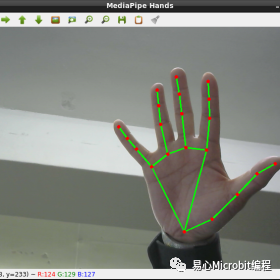
mediapipe – hand
九、安装pygame套件
https://www.pygame.org/news
sudoaptitude install libsdl-image1.2-dev
wgethttps://files.pythonhosted.org/packages/0f/9c/78626be04e193c0624842090fe5555b3805c050dfaa81c8094d6441db2be/pygame-1.9.6.tar.gz
sudoapt-get install python-dev libsdl-image1.2-dev libsdl-mixer1.2-dev libsdl-ttf2.0-devlibsdl1.2-dev libsmpeg-dev python-numpy subversion libportmidi-dev ffmpeglibswscale-dev libavformat-dev libavcodec-dev
sudoapt-get install libfreetype6-dev
pip3install pygame-1.9.6.tar.gz
十、安装AudioPlayer套件
https://pypi.org/project/audioplayer/
sudoapt-get install python-gst-1.0
sudoapt-get install gir1.2-gstreamer-1.0
sudoapt-get install gstreamer1.0-tools
sudoapt-get install gir1.2-gst-plugins-base-1.0
sudoapt-get install gstreamer1.0-plugins-good
sudoapt-get install gstreamer1.0-plugins-ugly
pip3install audioplayer
pip3install playsound==1.2.2
十一、安装Playsound套件
https://pypi.org/project/playsound/
sudoapt-get install python-gst-1.0
sudoapt-get install gir1.2-gstreamer-1.0
sudoapt-get install gstreamer1.0-tools
sudoapt-get install gir1.2-gst-plugins-base-1.0
sudoapt-get install gstreamer1.0-plugins-good
sudoapt-get install gstreamer1.0-plugins-ugly
pip3install playsound==1.2.2
十二、安装I2C接口与PCA9685电路驱动套件程序
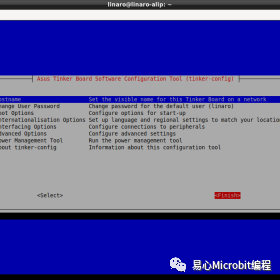
在操作I2C接口驱动套件程序安装之前,必须先至 tinker-config 系统管理工具启用 I2C 接口服务,之后才能安装相关套件与操作范例程序。
sudo tinker-config

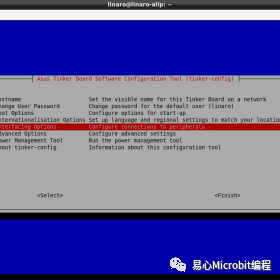
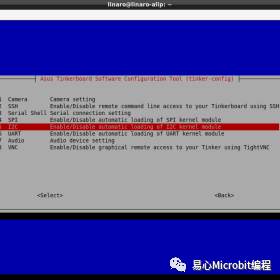
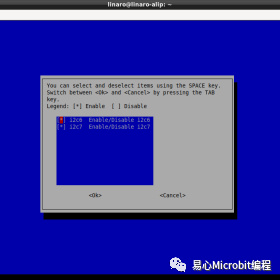
以空格键进行点选(打星号)
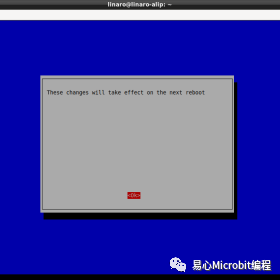
完成设定后,选择,并且立刻进行重新启动即可进行后续套件程序的安装。
设定完成之后,继续安装,快完工了!
https://pypi.org/project/smbus2/
pip3install SMBUS2
pip3install setuptools
sudopip3 install adafruit-circuitpython-servokit
sudopip3 install adafruit-pca9685
总结
本次的安装介绍主要是针对新版核心(Debian-10 2.0.3版)进行安装,相关安装流程与较旧版本核心的安装流程略有差异,若是新版核心建议还是按照本篇介绍进行安装,以确保相关的套件流程都可以正确安装与执行。
审核编辑:汤梓红
-
【NanoPi M2试用体验】Debian与Android系统的安装启动2016-06-09 8021
-
Flint OS for Tinker Board发布相对稳定版2017-07-05 5482
-
请问V2.0.3的库函数完全支持STM32F105吗?2019-03-08 3020
-
华硕ASUS tinker board S开发板调试的经验分享2019-03-09 4457
-
ASUS华硕tinker board 2S瑞芯微RK3399开发板怎么样?2022-03-07 1530
-
搭载RK3399Pro的ALPR Edge开发套件有助于车辆监控系统升级2022-09-06 1649
-
华硕发布旗下首款 RISC-V 架构开发板 Tinker V2023-03-16 860
-
华硕发布 RISC-V 架构单板计算机 Tinker V:配备 1.0 Ghz 单核芯片2023-06-09 1049
-
荣耀V10和华为Nova 2s应该选哪款?麒麟970和麒麟960对比评测2017-12-18 15605
-
debian安装教程2018-02-23 11859
-
小米Air 2s已修复电量10%时概率无法充电问题2020-12-01 6289
-
Tinker Board 2S嵌入式系统开箱介绍2022-11-07 2655
-
Tinker Board 2S系统与软件安装设定2022-11-14 3426
-
AN2953_如何从STM32F10xxx固件库V2.0.3迁移到STM32F10xxx标准外设库V3.0.02022-11-21 655
-
如何从STM32F10xxx固件库V2.0.3升级为STM32F10xxx标准外设库V3.0.02023-09-21 777
全部0条评论

快来发表一下你的评论吧 !
