

一个高效的现代EDA仿真验证流程
描述
下图是一个典型的EDA仿真验证环境,其中主要的组件就是激励生成、检查和覆盖率收集。
这三者缺一不可。
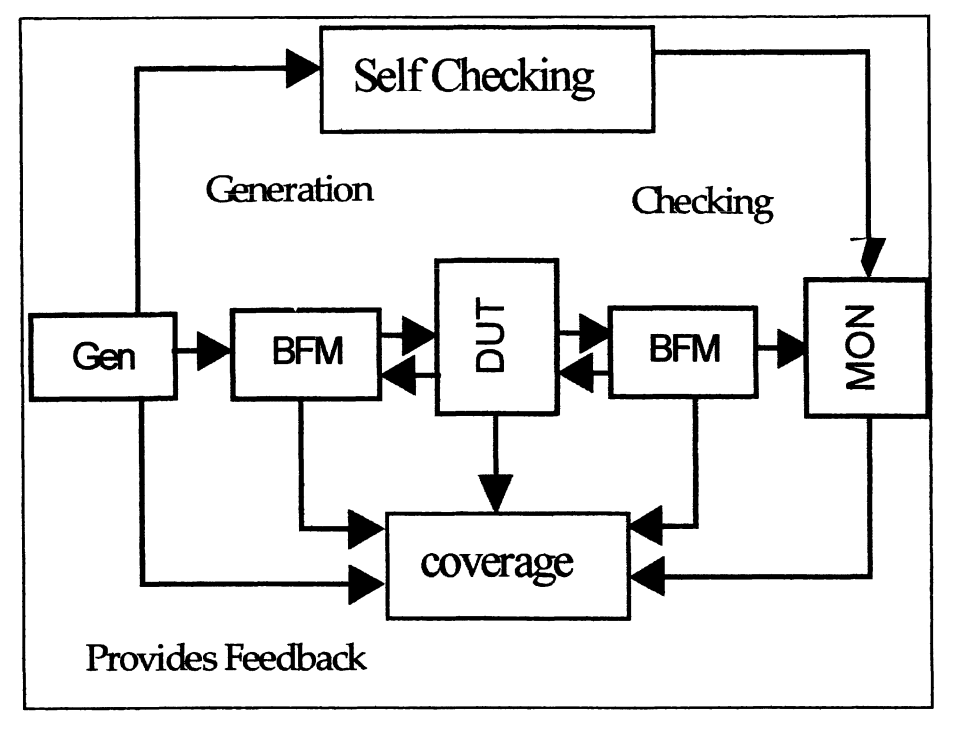
激励生成是我们验证环境的第一个关键组件,用于驱动DUT到一个预期的状态。
在DUT正在处理激励以及完成激励处理之后我们需要实时的或者离线的checker机制来确保芯片按照预期行为工作。
覆盖率是最终的量化机制、也可以理解为激励的反馈机制。我们不断地激励着DUT,同时也在进行检查,整个过程中通过覆盖率的量化来反馈验证工程师有没有验证完成?哪里还需要继续验证?
下图是覆盖率反馈到激励,以及表明验证是否完成的一个流程。在这个流程中,我们不断地根据覆盖率调整激励发送的随机机制,直到只剩几个边界场景很难覆盖到,我们再构造定向用例。
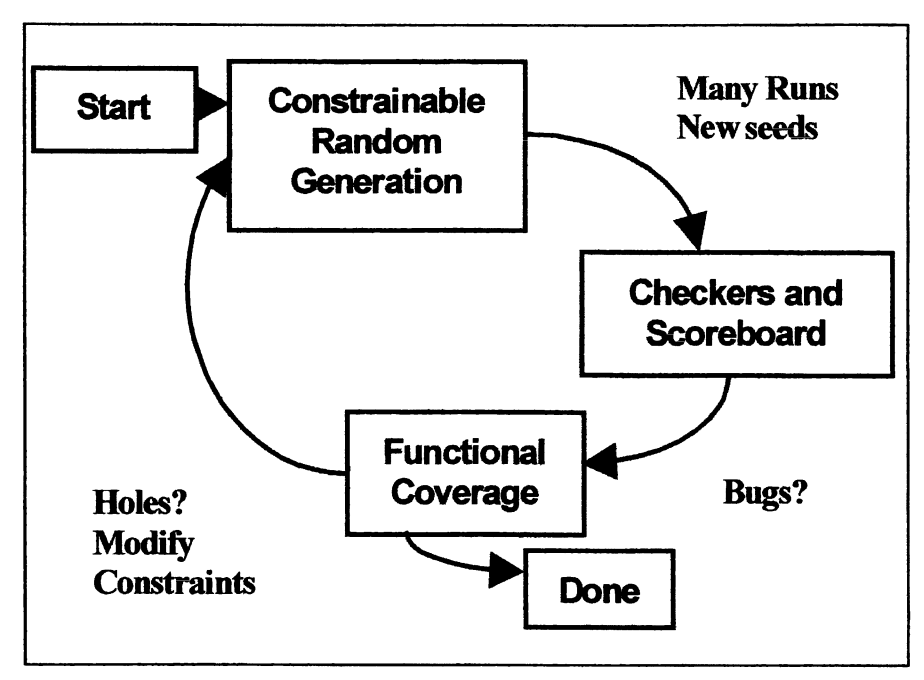
这是一个比较高效的现代EDA仿真验证流程,整个流程中激励生成、检查机制和覆盖率量化都需要保证完备性。
完备的激励+完备的检查机制+完备的覆盖率量化才能够获得有信心的验证结果,缺一不可。另外,这三者中的任何一个做到绝对的完备就是非常难的。
如果覆盖率完备了,也可以保证激励的完备。如果发现用例构造过程非常困难,大概率是验证环境架构的不合理。要么趋向于定向用例,你需要维护非常多的sequence,经常一个需求会让你改动多个sequence;要么趋向完全随机,可控性比较差。这两个情况都降低验证效率。
checker是必须要保证完备的,否则就算你激励覆盖到了某个场景,你也识别不出来问题。验证的重点是发现所有的bug,然后才是尽可能地保证激励完备性。如果非要分个优先级,个人觉得checker的完备要高于激励的完备。因为如果你遗漏了某个bug,更上层的验证环境也许可以通过集成你的checker来发现问题。
覆盖率也非常重要。否则就是在黑暗中胡乱开枪射击,你不知道去过哪里,也就不知道后面要往哪里去了。
保证激励、检查和覆盖率的完备,全部都是难点。
审核编辑:刘清
-
EDA是什么,有哪些方面2025-06-23 6884
-
Veloce平台在大规模SOC仿真验证中的应用2010-05-28 2389
-
FPGA设计的仿真验证概述2019-04-10 2810
-
基于EDA仿真技术的电子时钟系统设计2010-02-24 901
-
AWR和Zuken发布PCB射频验证流程2017-12-07 916
-
一文知道EDA的设计流程2020-05-15 15992
-
一些个SystemVerilog高效仿真技巧2023-01-21 2278
-
国内原型验证市占第一,思尔芯发布硬件仿真系统,提速数字EDA全流程2023-03-23 2768
-
EDA仿真验证环境中的激励、检查和覆盖率2023-04-15 2809
-
eda技术的核心是仿真吗 EDA的四要素 EDA技术的作用2023-04-24 3934
-
补齐重要版图,国产EDA厂商实现全流程数字芯片前端验证!芯华章发布硬件仿真器,EDA2.0战略更进一步2023-06-26 3739
-
eda技术与vhdl基础 eda的主要功能优点 现代EDA技术的特点有哪些2023-08-09 3369
-
EDA形式化验证漫谈:仿真之外,验证之内2023-09-01 2536
-
EDA全流程的重要意义,以及国内EDA全流程进展2023-12-14 3972
-
数字电路设计有哪些仿真验证流程2024-01-02 4107
全部0条评论

快来发表一下你的评论吧 !
