

降低运动控制应用中可闻噪声的三种出色方式
描述
随着家庭和办公室开放式布局设计的出现以及日渐转向混合动力电动汽车和电动汽车,愈发需要更安静、高效的电机控制。即使是非常小的声学差异,也会对可闻噪声造成显著影响。
您可以看到生活空间中的电器如何影响整体噪声水平。利用具有更高功率密度、更高集成度和更高效系统的电机控制电路等先进的实时控制技术,可帮助您实现更出色的系统声学性能。一些其他策略包括使用连续脉宽调制 (PWM) 的矢量磁场定向控制 (FOC) 算法,减少振动的特定控制算法,以及应用死区时间补偿和 PWM 生成来降低可闻噪声的集成控制。
由于这些不同的产品和策略都可以降低运动控制应用中的可闻噪声,因此可能很难确定哪种策略更适合您的应用。在本文中,我将以 BLDC 集成控制栅极驱动器为例,列出降低运动控制应用中可闻噪声的三种出色方式。想要了解更多关于运动控制的内容,可阅读我们运动控制系列技术文章第一篇“如何在工业驱动器中实现精密的运动控制”。
PWM
用于降低电机控制应用中可闻噪声的第一种策略是连续 PWM。PWM 是一种技术,通过导通和关断晶体管来产生输出波形,从而让电机电压在给定时间处于高电压或低电压状态。然后,电机中的电感对这些波形进行滤波,以便基本上平均输出波形。调整占空比(波形导通时间与关断时间之比)将改变平均电压。图 2 展示了使用 PWM 生成正弦波的一个示例。

图 2:使用 PWM 生成正弦波的示例
例如,德州仪器 (TI) MCF8315A BLDC 集成控制栅极驱动器是一款无传感器 FOC 电机驱动器,可实现连续和非连续空间矢量 PWM 方案。连续调制有助于减小低电感电机的电流纹波,但由于所有三个相位互相交错,因此会导致更高的开关损耗。非连续调制的开关损耗更低(因为一次只有两个相位互相交错),但电流波纹更高。在图 3 和图 4 中,您可以看到连续和非连续 PWM 的差异。
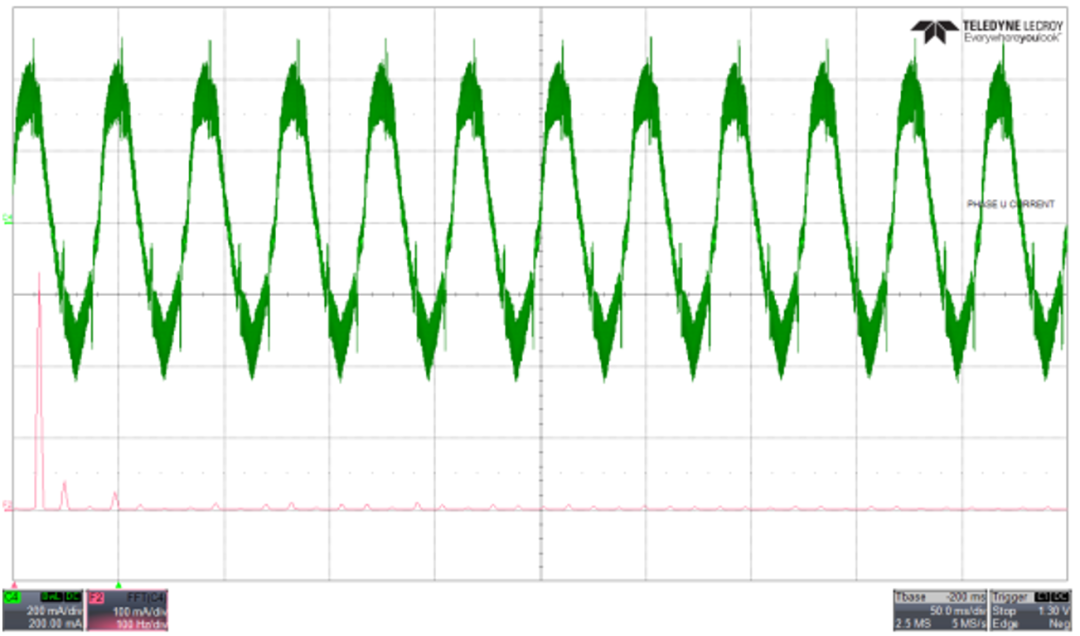
图 3:相电流波形与快速傅里叶变换 (FFT) 非连续 PWM 之间的关系
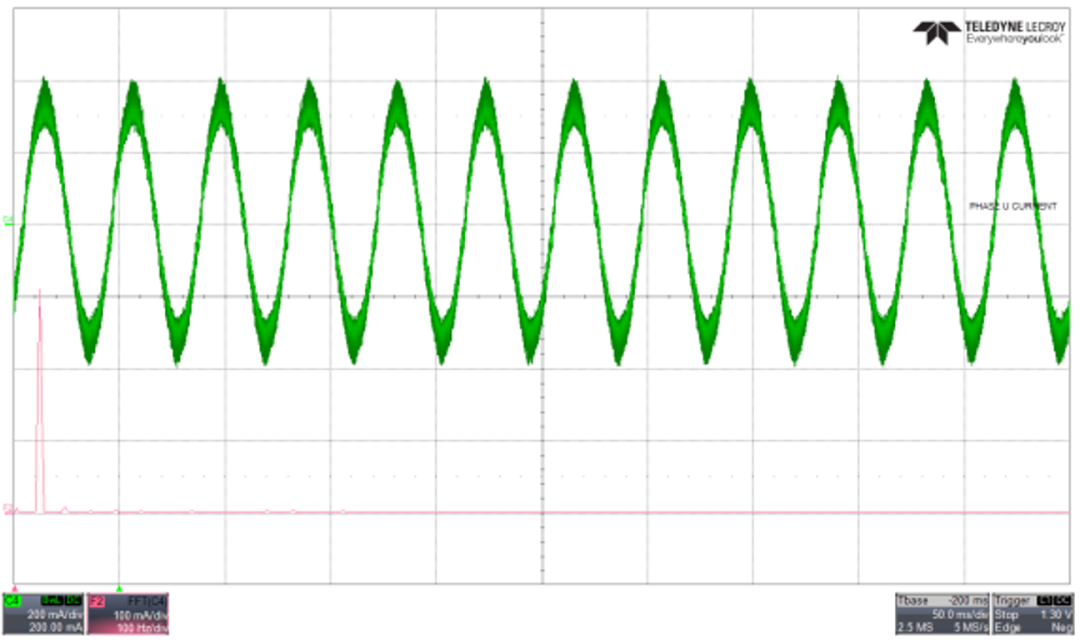
图 4:相电流波形与 FFT 连续 PWM 之间的关系
死区时间补偿
用于降低电机控制应用中可闻噪声的第二种策略是死区时间补偿。在电机控制应用中,在半桥中高侧和低侧金属氧化物半导体场效应晶体管的开关之间插入死区时间可避免发生击穿。插入死区时间后,相节点上的预期电压与施加的电压会有所不同,相节点电压会在相电流中引入不必要的失真,进而导致可闻噪声。
要管理这种额外的噪声,工程师可以利用谐振控制器集成死区时间补偿,以便控制相电流中的谐波分量,从而缓解因死区时间导致的电流失真,如图 5 所示。
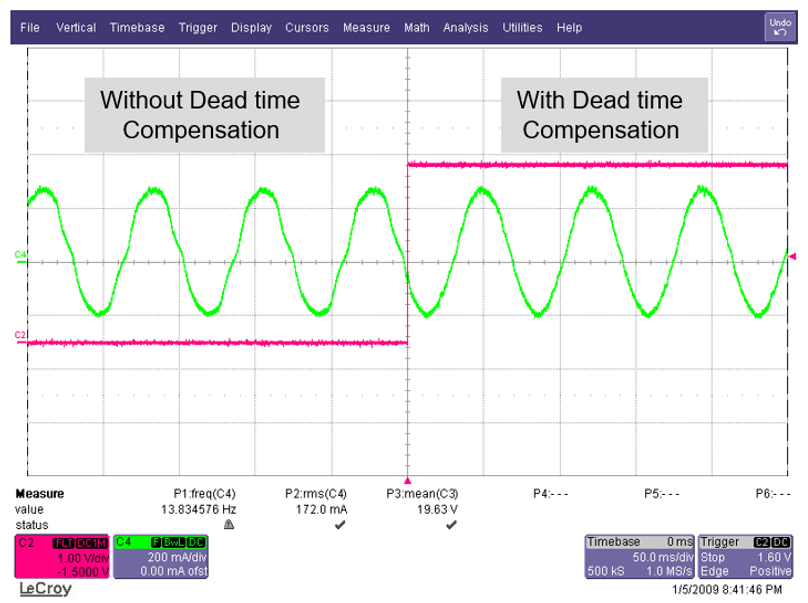
图 5:无传感器 FOC 死区时间补偿分析
例如,TI 的 MCF8316A BLDC 集成控制栅极驱动器(一款无传感器 FOC 电机驱动器)采用此内置功能来优化多种电机频率下的声学性能,如图 6 所示。
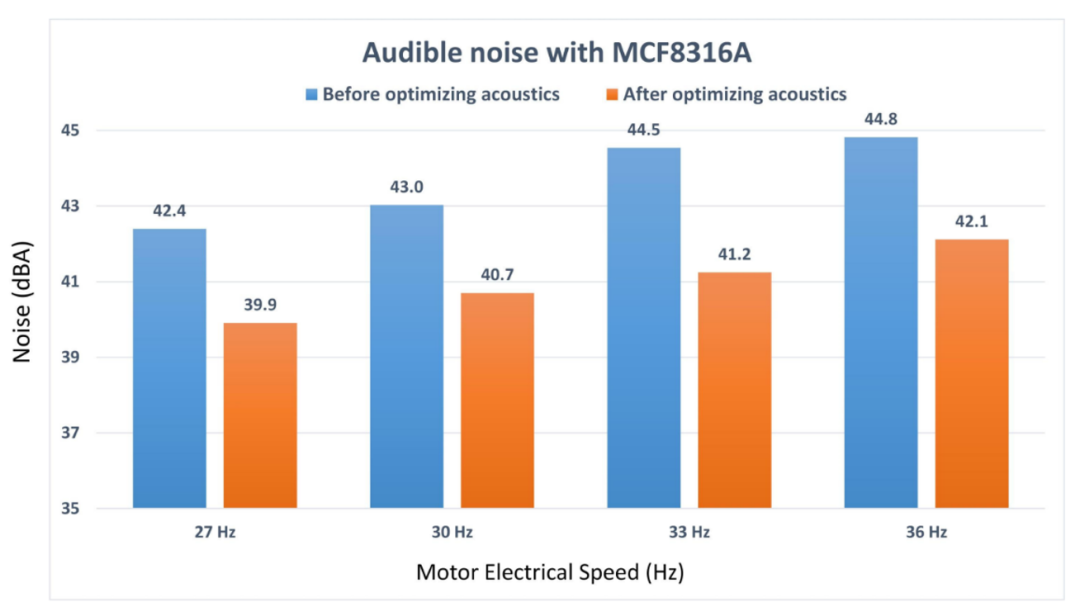
图 6:实施 PWM 调制和死区时间补偿来优化 MCF8316A 声学性能
可变换向模式
用于降低电机控制应用中可闻噪声的最后一种策略是可变换向模式。在梯形换向中,有两种主要配置:120 度和 150 度。120 度梯形换向可能会导致更多的声学噪声,因为较长的高阻抗周期会导致扭矩波纹增大,如图 7 和 8 所示。150 度梯形换向只能在低速下运行,因为检测过零的窗口期很短。
为了应对这些挑战并提高声学性能,工程师可以构建能够在 120 度梯形换向和 150 度梯形换向之间动态切换的电机驱动器系统。这种动态调制可以改善 BLDC 电机控制期间的整体声学性能。
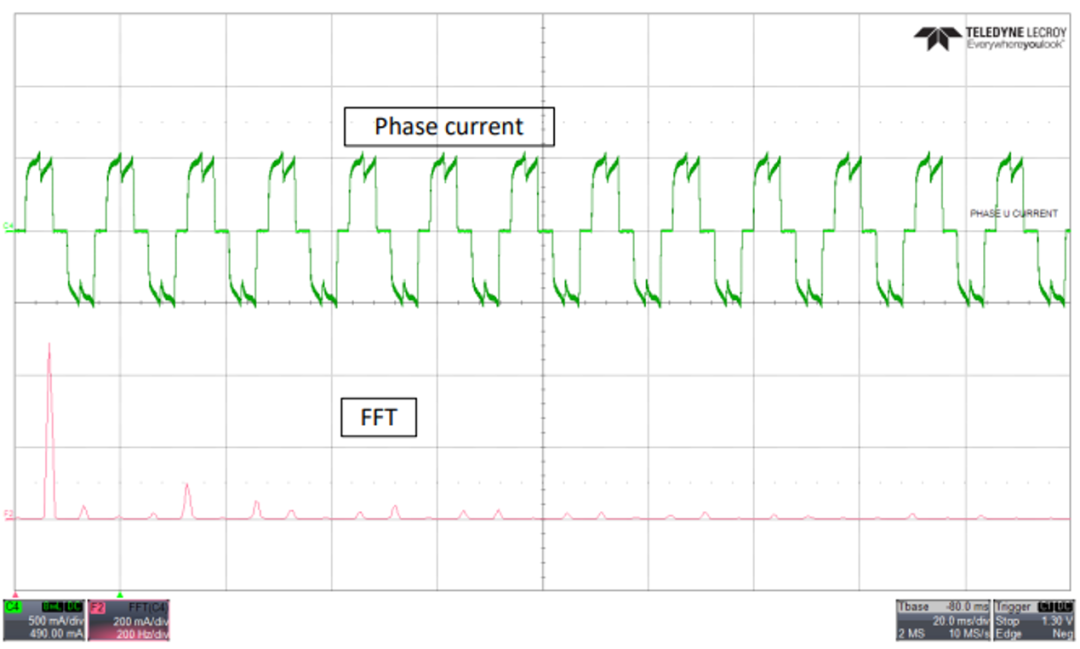
图 7:相电流和 FFT - 120 度换向
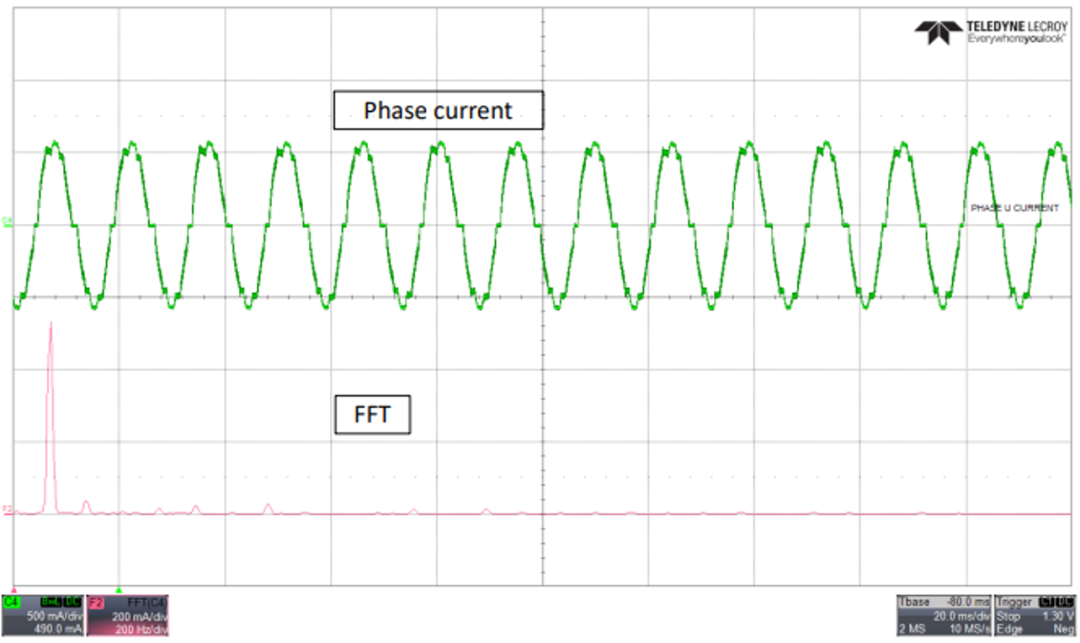
图 8:相电流和 FFT - 150 度换向
例如,TI 无传感器 BLDC 集成梯形控制栅极驱动器(如 MCT8329 和 MCT8316)采用此内置功能来优化多种电机频率下的声学性能,如图 9 所示。
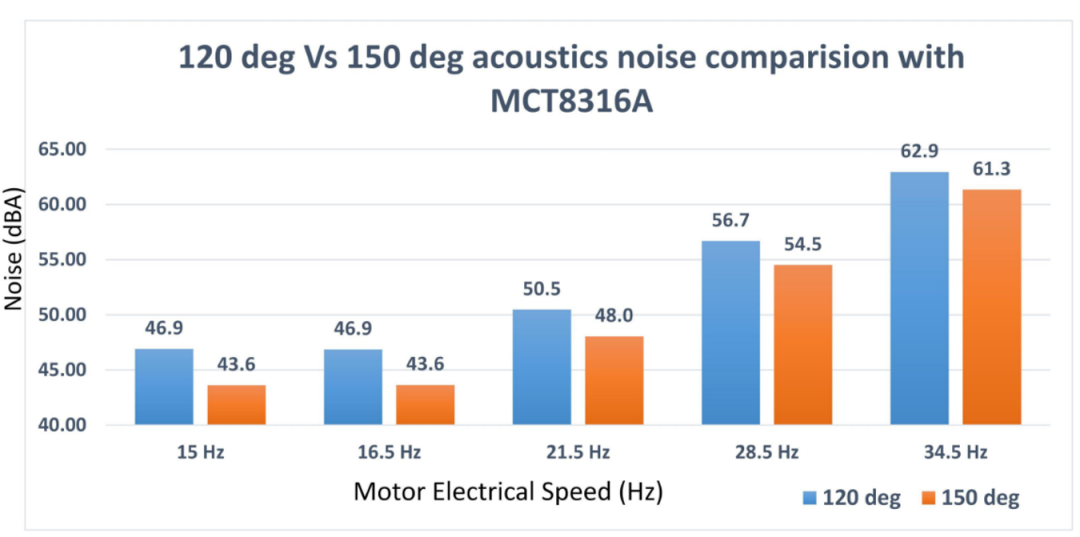
图 9:实施具有动态调制的可变换向模式来优化 MCT8316A 声学性能
结语
TI 在加大运动控制技术的投资,助力构建更高效的声学敏感型系统,其构建块旨在满足声学要求。当您设计系统时,请记得采用这三种出色方式来降低电机控制应用中的可闻噪声。
审核编辑:汤梓红
-
运动控制的三种控制方式2024-01-23 2832
-
变频器的三种控制方式 | 变频器三种控制方式的优缺点2023-12-18 7741
-
降低MOSFET 1/f噪声的三种办法是什么?2023-09-17 5721
-
浅谈伺服电机的三种控制方式2023-07-26 2771
-
降低运动控制应用中可闻噪声的方法2023-07-17 1780
-
Proteus教程:按键的三种控制方式(轮询、矩阵、中断)2023-06-14 6470
-
降低运动控制应用中可闻噪声的三种方式2023-05-02 1348
-
降低运动控制应用中可闻噪声的三种出色方式2023-04-19 1163
-
伺服电机的三种控制方式2022-08-17 7991
-
深度解读伺服电机的三种控制方式2021-02-03 5077
-
伺服电机的三种控制方式怎么选2021-01-29 2899
-
如何应用伺服电机的三种控制方式2021-01-22 2170
-
伺服电机的三种控制方式该如何应用2020-12-14 6394
全部0条评论

快来发表一下你的评论吧 !
