

使用Linux自旋锁实现互斥点灯
描述
1. 自旋锁介绍
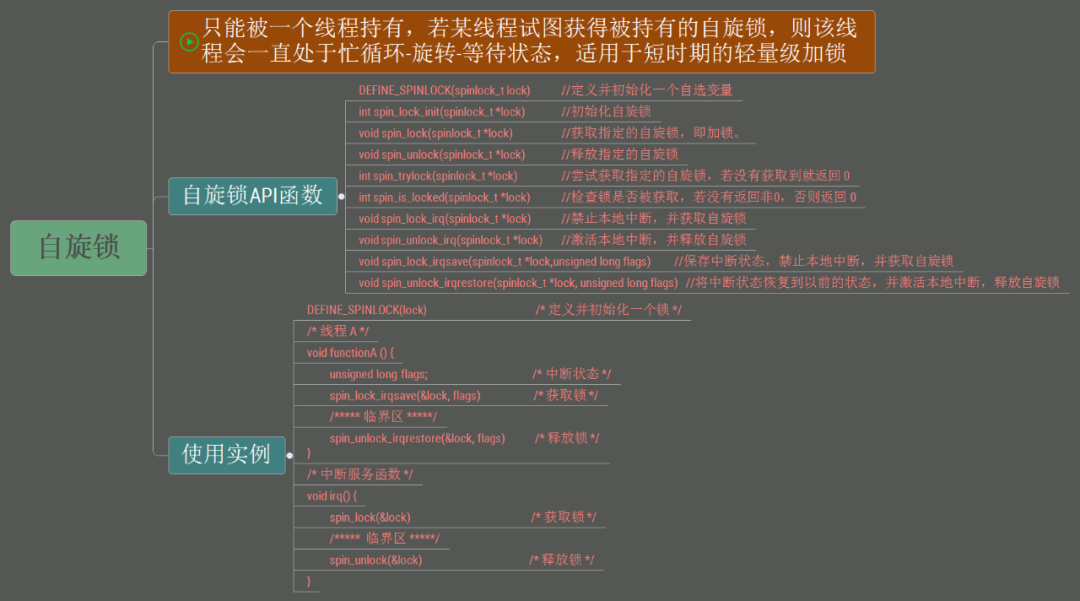
自旋锁最多只能被一个可执行线程持有。 如果一个线程试图获得一个已经被持有的自旋锁,那么该线程将循环等待,然后不断的判断锁是否能够被成功获取,直到获取到锁才会退出循环; 如果锁未被持有,请求锁的执行线程就可以立即得到它,继续执行
等待自旋锁的线程一直处于自旋状态,会浪费处理器时间,降低系统性能,因此自旋锁的持有时间不能太长,适用于短时期的轻量级加锁
内核使用结构体spinlock_t表示自旋锁,结构体定义如下所示:
typedef struct spinlock {
union {
struct raw_spinlock rlock;
#ifdef CONFIG_DEBUG_LOCK_ALLOC
#define LOCK_PADSIZE (offsetof(struct raw_spinlock, dep_map))
struct {
u8 __padding[LOCK_PADSIZE];
struct lockdep_map dep_map;
};
#endif
};
} spinlock_t;
自旋锁操作相关API函数如下图示:
2. 自旋锁实例
本实例中使用自旋锁操作来实现对LED设备的互斥访问,即一次只允许一个应用程序使用LED灯,代码是在pinctrl与gpio子系统下的字符设备驱动框架一文的基础上完成的
在本例程中,定义一个变量dev_stats表示设备的使用情况,该变量为0时表示设备没有被使用,大于0时表示设备被使用。 在驱动的open函数中需先判断该变量是否为0,若为0的话就使用设备,并且将dev_stats加1,表示设备被使用了。 使用完后在release函数中需将dev_stats减1,表示设备没有被使用了。 因此真正实现设备互斥访问的是变量dev_stats,我们使用自旋锁对dev_stats来做保护
2.1 修改设备树文件
设备树文件修改与pinctrl与gpio子系统下的字符设备驱动框架文中的修改方法一样,不需要做任何修改
2.2 编写驱动程序
拷贝pinctrl与gpio子系统下的字符设备驱动框架文中的gpioled.c驱动文件,并重命名为spinlock.c,对部分代码进行修改,其余保持不变
在设备结构体中,添加自旋锁以及设备状态变量dev_stats
struct gpioled_dev{
dev_t devid; //设备号
struct cdev cdev; //cdev字符设备
struct class *class; //类
struct device *device; //设备
int major; //主设备号
int minor; //次设备号
struct device_node *nd; //设备节点
int led_gpio; //所使用的gpio编号
int dev_stats; //设备状态,为0表示设备为使用
spinlock_t lock; //自旋锁
};
struct gpioled_dev gpioled; //定义led设备
打开设备时,判断dev_stats的值来检查LED有没有被占用
static int led_open(struct inode *inode, struct file *filp){
unsigned long flags;
filp->private_data = &gpioled; //设置私有数据
spin_lock_irqsave(&gpioled.lock, flags); //上锁
if(gpioled.dev_stats)){
spin_unlock_irqrestore(&gpioled.lock, flags); //解锁
return -EBUSY; //LED被使用,返回忙
}
gpioled.dev_stats++; //标记设备以打开
spin_unlock_irqrestore(&gpioled.lock, flags); //解锁
return 0;
}
关闭设备时,将dev_stats减1,表示设备没有被使用了
static int led_release(struct inode *inode, struct file *filp){
unsigned long flags;
struct gpioled_dev *dev = filp->private_data;
spin_lock_irqsave(&dev->lock, flags); //上锁
if(dev->dev_stats)){
dev->dev_stats--;
}
spin_unlock_irqrestore(&dev->lock, flags); //解锁
return 0;
}
驱动入口函数中,对自旋锁进行初始化
static int __init led_init(void){
int ret = 0;
/* 初始化自旋锁 */
spin_lock_init(&gpioled.lock);
/* 设置 LED 所使用的 GPIO */
/* 1、获取设备节点:gpioled */
gpioled.nd = of_find_node_by_path("/gpioled");
......
......
}
2.3 编写测试程序
拷贝pinctrl与gpio子系统下的字符设备驱动框架文中的gpioledApp.c测试程序,并重命名为spinlockApp.c,添加模拟占用LED的代码,使测试程序在获取LED驱动使用权后会持续一段时间,添加如下代码
while(1){
sleep(5);
cnt++;
printf("App running times: %d\\r\\n",cnt);
if(cnt >= 5)
break;
}
2.4 编译测试
编译驱动程序:当前目录下创建Makefile文件,并make编译
KERNELDIR := /home/andyxi/linux/kernel/linux-imx-rel_imx_4.1.15_2.1.0_ga_andyxi
CURRENT_PATH := $(shell pwd)
obj-m := spinlock.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
编译测试程序:无需内核参与,直接编译即可
arm-linux-gnueabihf-gcc spinlockApp.c -o spinlockApp
运行测试:启动开发板后,加载驱动模块,操作LED灯后,相应时间内再次操作LED会提示失败,说明互斥点灯成功
depmod #第一次加载驱动的时候需要运行此命令
modprobe spinlock.ko #加载驱动
# 打开LED后,每隔5秒会输出一行App running times
./spinlockApp /dev/gpioled 1& # & 表示在后台运行APP

# 在LED被占用期间,再次操作LED,会输出打开驱动失败
./spinlockApp /dev/gpioled 0

-
自旋锁和互斥锁的使用场景是什么2024-07-10 2438
-
互斥锁和自旋锁的区别 自旋锁临界区可以被中断吗?2023-11-22 1893
-
如何用C++11实现自旋锁2023-11-11 2677
-
Linux互斥锁的作用 互斥锁是什么2023-07-21 1815
-
使用Linux互斥体实现互斥点灯2023-04-13 1581
-
Linux下线程间通讯--互斥锁2022-08-24 3052
-
Linux中的伤害/等待互斥锁介绍2021-11-06 3546
-
深入了解互斥锁、条件变量、读写锁以及自旋锁2021-11-01 2629
-
深度解析自旋锁及自旋锁的实现方案2020-09-19 5159
-
Linux 自旋锁spinlock2020-09-11 2823
-
信号量、互斥锁、自旋锁2017-08-29 2810
-
Linux驱动开发笔记-自旋锁和信号量2015-08-30 3711
-
Linux高级编程---互斥锁2015-01-13 4458
全部0条评论

快来发表一下你的评论吧 !
