

EDA仿真验证环境中的激励、检查和覆盖率
电子说
描述
下图是一个典型的EDA仿真验证环境,其中主要的组件就是激励生成、检查和覆盖率收集。
这三者缺一不可。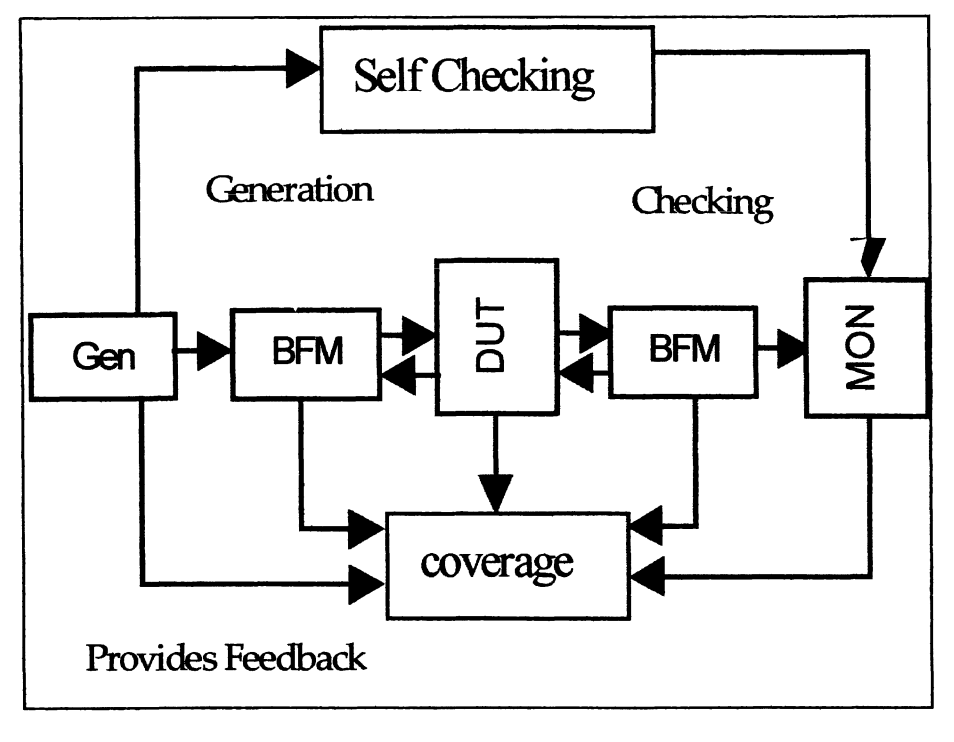
· 激励生成是我们验证环境的第一个关键组件,用于驱动DUT到一个预期的状态。
· 在DUT正在处理激励以及完成激励处理之后我们需要实时的或者离线的checker机制来确保芯片按照预期行为工作。
· 覆盖率是最终的量化机制、也可以理解为激励的反馈机制。我们不断地激励着DUT,同时也在进行检查,整个过程中通过覆盖率的量化来反馈验证工程师有没有验证完成?哪里还需要继续验证?
下图是覆盖率反馈到激励,以及表明验证是否完成的一个流程。在这个流程中,我们不断地根据覆盖率调整激励发送的随机机制,直到只剩几个边界场景很难覆盖到,我们再构造定向用例。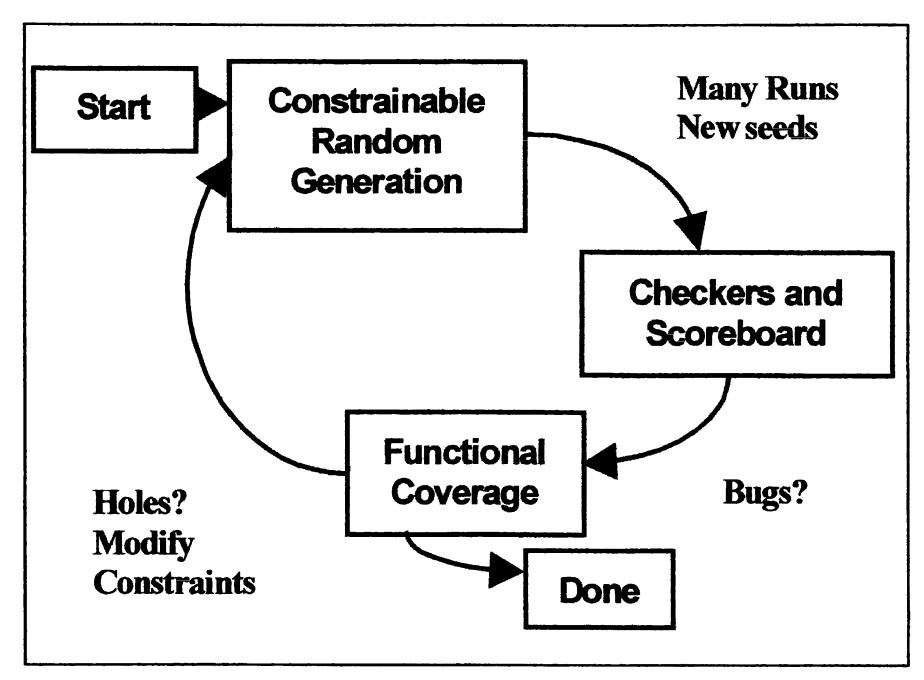
这是一个比较高效的现代EDA仿真验证流程,整个流程中激励生成、检查机制和覆盖率量化都需要保证完备性。
完备的激励+完备的检查机制+完备的覆盖率量化才能够获得有信心的验证结果,缺一不可。另外,这三者中的任何一个做到绝对的完备就是非常难的。
· 如果覆盖率完备了,也可以保证激励的完备。如果发现用例构造过程非常困难,大概率是验证环境架构的不合理。
要么趋向于定向用例,你需要维护非常多的sequence,经常一个需求会让你改动多个sequence;要么趋向完全随机,可控性比较差。这两个情况都降低验证效率。
· checker是必须要保证完备的,否则就算你激励覆盖到了某个场景,你也识别不出来问题。验证的重点是发现所有的bug,然后才是尽可能地保证激励完备性。如果非要分个优先级,个人觉得checker的完备要高于激励的完备。因为如果你遗漏了某个bug,更上层的验证环境也许可以通过集成你的checker来发现问题。
· 覆盖率也非常重要。否则就是在黑暗中胡乱开枪射击,你不知道去过哪里,也就不知道后面要往哪里去了。
保证激励、检查和覆盖率的完备,全部都是难点。
审核编辑:刘清
-
一个高效的现代EDA仿真验证流程2023-04-13 3459
-
怎么用Vivado做覆盖率分析2024-01-03 3843
-
关于SpinalHDL中的验证覆盖率收集简单说明2022-06-24 3592
-
重点厘清覆盖率相关的概念以及在芯片开发流程中跟覆盖率相关的事项2022-09-14 3135
-
结合覆盖率驱动技术的RVM验证方法学在SOC验证中的应用2009-09-05 1095
-
针对功能覆盖率的验证过程2009-12-23 1056
-
基于覆盖率的功能验证方法2011-06-29 1573
-
Verilog代码覆盖率检查2012-04-29 9141
-
使用 Veloce 完成局部系统级协议检查和 覆盖率收敛2017-09-05 813
-
嵌入式代码覆盖率统计方法和经验2021-01-06 4155
-
统计嵌入式代码覆盖率的方法和经验2021-03-29 3001
-
高覆盖率的Verilog代码的编写技巧2022-05-26 5325
-
SystemVerilog的覆盖率建模方式2023-06-25 2657
-
Vivado仿真器和代码覆盖率简析2023-08-03 3713
-
利用静态检查工具完善功能安全中测试覆盖率2024-09-05 1734
全部0条评论

快来发表一下你的评论吧 !
