

LSM6DSO六轴传感器使用指南
描述
博主最近在调试 lsm6dso,一款集合加速度和陀螺仪的模块,主要运用在手持设备中。
1、前言
LSM6DSO 是 ST 公司的六轴传感器,集成三轴加速度和三轴陀螺仪。
2、传感器特性
- 具有数字 I2C、SPI 和 MIPI I3C 串口标准输出,组合工作在高性能模式下功耗只要 0.55 mA。
- 满量程加速度范围:±2/±4/±8/±16 g,且角速率范围为 ±125/±250/±500/±1000/±2000 dps。
- 经过配置,LSM6DSO 可利用硬件识别出的自由落体事件、6D 方向、单击和双击感应、活动或不活动、唤醒事件,来生成中断信号。
- SMD 封装的超小尺寸和重量使其成为手持便携式应用的理想选择,如智能手机、物联网(IoT)连接设备,穿戴,以及需要减小封装尺寸和重量的其他应用,尺寸:2.5 mm x 3 mm x 0.83 mm
- 支持 1.71V to 3.6V 供电。
3、参考资料
ST 对于自己出的传感器,都会提供驱动 demo,放在 github,如下:
https://github.com/STMicroelectronics
其中分为不同的平台,有的是仅仅基于 C 语言的平台无关的驱动,有的是基于 STM32,有的是基于 Linux,有的是基于 Android,一开始学习的时候,建议大家下载平台无关的驱动:

若后续大家想移植到 Linux、Android ,也可以在这里可以找到工程:
https://github.com/STMicroelectronics/STMems_Standard_C_drivers
https://github.com/STMicroelectronics/st-mems-android-linux-drivers-input
https://github.com/STMicroelectronics/STMems_Linux_IIO_drivers
https://github.com/STMicroelectronics/STMems_Android_Sensor_HAL_IIO
lsm6dso-pid 参考代码:
https://github.com/STMicroelectronics/STMems_Standard_C_drivers/tree/master/lsm6dso_STdC
arduino、micropython 参考代码:
https://github.com/arduino-libraries/Arduino_LSM6DSOX
https://github.com/micropython-Chinese-Community/mpy-lib/tree/master/sensor/LSM6DSO
数据手册下载,其中包含有中文应用手册:
https://www.st.com/zh/mems-and-sensors/lsm6dso.html

4、引脚说明
一共 14 个 PIN 脚,每个引脚的详细说明可以参考数据手册。 总的来说就是 I2C 和 SPI 无法同时使用,因为它们有共用 PIN 脚。

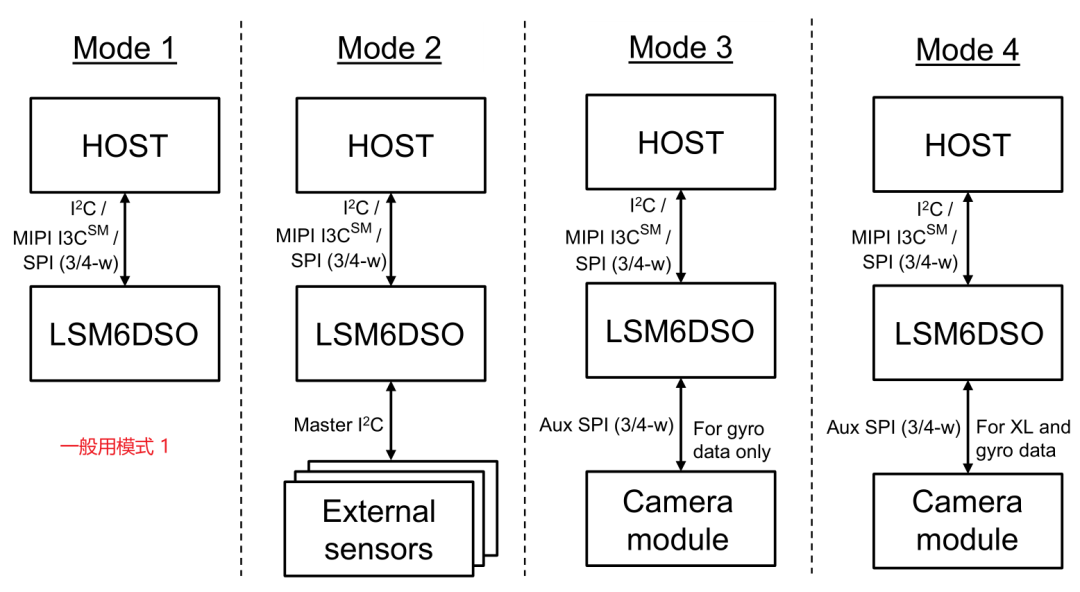
5、硬件模式
一般用模式 1,模式 2、模式 3、模式 4 比较复杂,可以外接传感器,摄像头等。
6、I2C 读写地址
LSM6DSO 从机地址是 110101x ,最后一位 x 和一个 PIN 的状态有关系。 如果 SDO/SA0 是高,从机地址是 1101011。 如果 SDO/SA0 是低,从机地址是 1101010。
这个方案可以使得一路 I2C bus 挂两个 lsm6dso,同时使用。
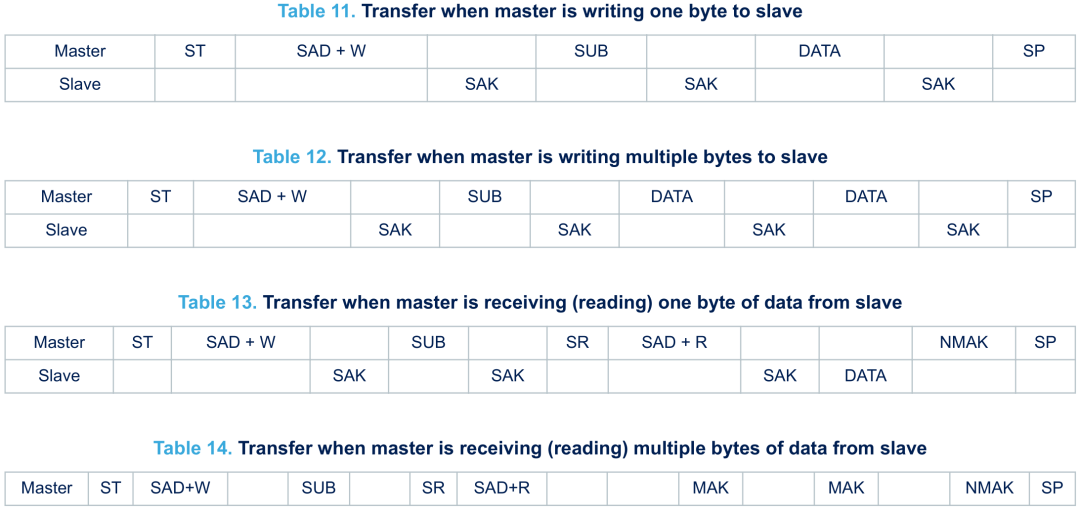
加上读写位,总结如下:

传输示意图如下:

7、寄存器
该器件有 60+ 个寄存器,主要的几个如下:
1、设备 ID
只读,出厂已经固化在硬件里面了,可以通过读写这个寄存器,判断设备是否存在,通讯是否正常,设备的 ID 是 0x6C。

2、加速度控制寄存器
这个寄存器可以设置加速度的量程、输出速率等;


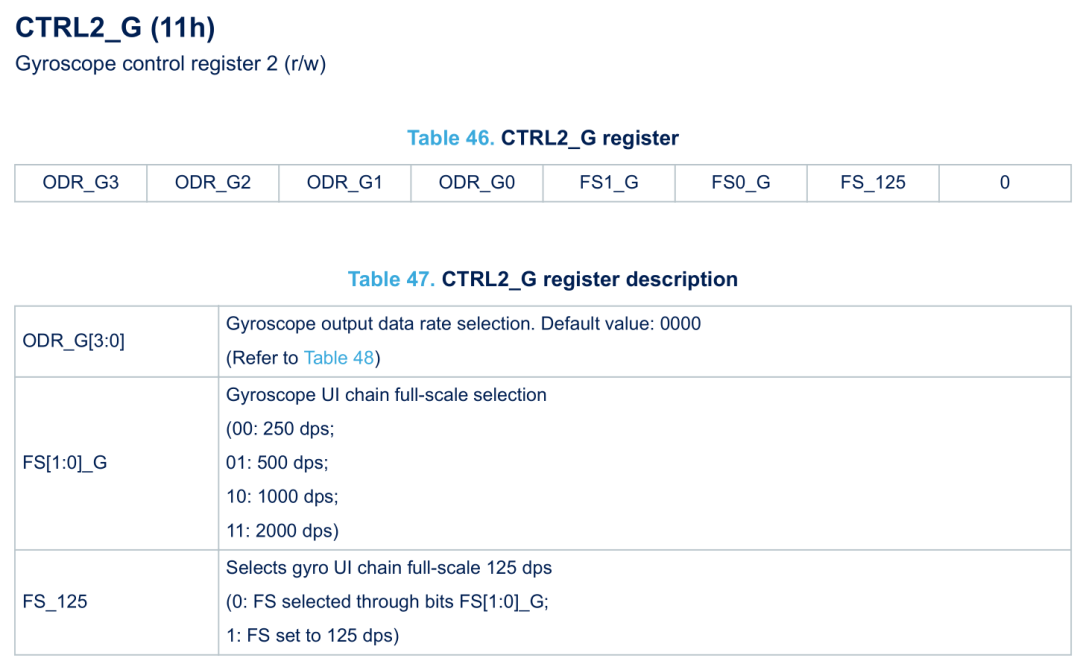
3、陀螺仪控制寄存器
这个寄存器可以设置陀螺仪的量程、输出速率等;

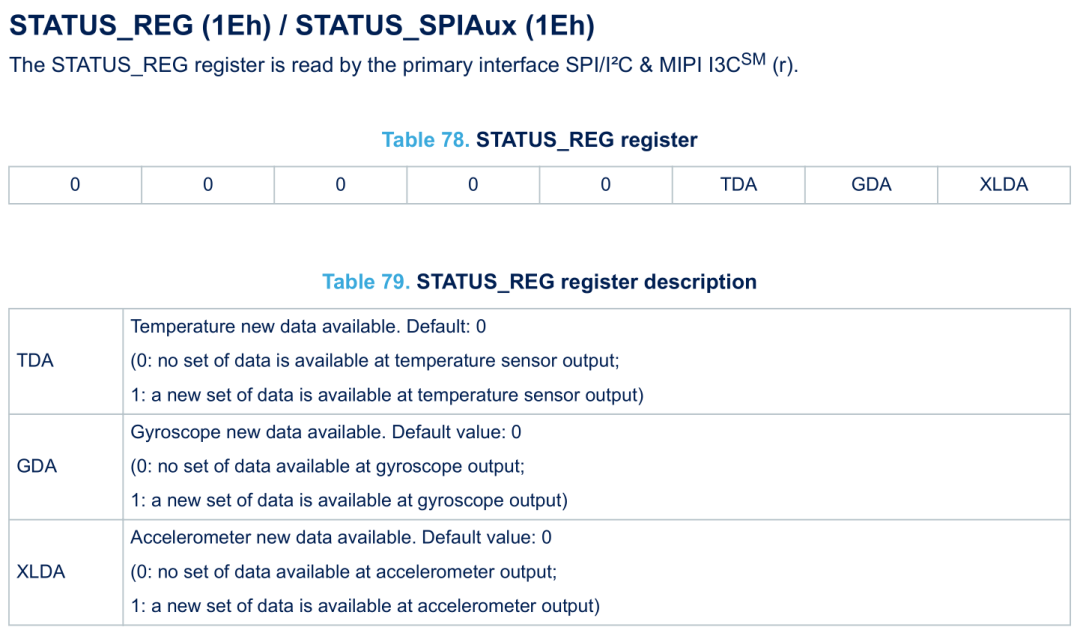
4、状态寄存器
通过读取这个寄存器可以判断,传感器是否有新的数据。
5、温度传感器
2个寄存器,输出的是有符号数据。

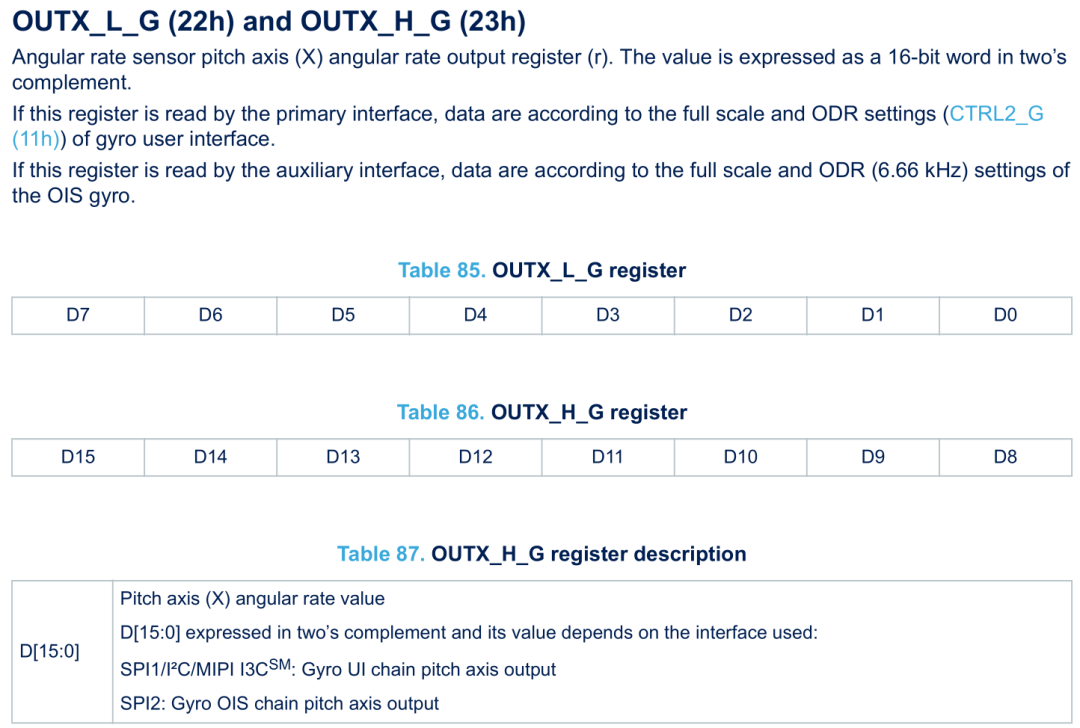
6、陀螺仪数据传感器
总共 6 个寄存器,分 x、y、z 三轴的高位和低位,这里要注意,输出的是有符号数据。


7、加速度数据传感器
总共 6 个寄存器,分 x、y、z 三轴的高位和低位,这里要注意,输出的是有符号数据。



8、代码
博主用的是轮询去读数据,大家也可以配置成中断方式。 另外,博主是直接去各个数据寄存器去读数据,大家也可以配置成去器件 FIFO 中读数据。 该器件有 3Kbyte 的 FIFO,若使用压缩算法,可以达到 9Kbyte。
初始化部分:
i2c_init();
LSM6DSO_Check();
u8 LSM6DSO_Check(void)
{
u8 temp;
temp=LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_WHO_AM_I);
if(temp==0X6C)
return 0;
else
return 1;
}
LSM6DSO_WriteOneByte(LSM6DSO_ADDRESS,LSM6DSO_CTRL1_XL,ODR_XL_104Hz|FS_XL_2g);
LSM6DSO_WriteOneByte(LSM6DSO_ADDRESS,LSM6DSO_CTRL2_G,ODR_G_104Hz|FS_G_250);
读数据
while(1)
{
status=LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_STATUS_REG);
if(status & TEM_DATA_AVAILABLE)
{
temp_raw=LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUT_TEMP_L)|(LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUT_TEMP_H)<<8);
temp_deg=temp_raw/TEMP_LSB_PER_DEG+TEMP_OFFSET_DEG;
sprintf((char*)temperature,"temperature:%02f",temp_deg);
LCD_ShowString(30,90,200,16,16,temperature);
}
if(status & GYR_DATA_AVAILABLE)
{
gyr_x_raw = LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUTX_L_G)|(LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUTX_H_G)<<8);
gyr_y_raw = LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUTY_L_G)|(LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUTY_H_G)<<8);
gyr_z_raw = LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUTZ_L_G)|(LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUTZ_H_G)<<8);
gyr_x = gyr_x_raw*GYR_LSB_250_PER;
gyr_y = gyr_y_raw*GYR_LSB_250_PER;
gyr_z = gyr_z_raw*GYR_LSB_250_PER;
printf("Gyro:X:%02f mdps,Y:%02f mdps,Z:%02f mdps \\r\\n",gyr_x,gyr_y,gyr_z);
}
if(status & ACC_DATA_AVAILABLE)
{
acc_x_raw=LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUTX_L_A)|(LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUTX_H_A)<<8);
acc_y_raw=LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUTY_L_A)|(LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUTY_H_A)<<8);
acc_z_raw=LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUTZ_L_A)|(LSM6DSO_ReadOneByte(LSM6DSO_ADDRESS,LSM6DSO_OUTZ_H_A)<<8);
acc_x=acc_x_raw*ACC_LSB_2G_PER;
acc_y=acc_y_raw*ACC_LSB_2G_PER;
acc_z=acc_z_raw*ACC_LSB_2G_PER;
printf("Acc:X:%02f mg,Y:%02f mg,Z:%02f mg \\r\\n",acc_x,acc_y,acc_z);
}
寄存器定义
#define LSM6DSO_ADDRESS 0xD4
#define LSM6DSO_ID 0x6C
#define LSM6DSO_SDO_CRTL 0x02
#define LSM6DSO_FIFO_CTRL1 0x07
#define LSM6DSO_FIFO_CTRL2 0x08
#define LSM6DSO_FIFO_CTRL3 0x09
#define LSM6DSO_FIFO_CTRL4 0x0A
#define LSM6DSO_COUNTER_BDR_REG1 0x0B
#define LSM6DSO_COUNTER_BDR_REG2 0x0C
#define LSM6DSO_INT1_CTRL 0x0D
#define LSM6DSO_INT2_CTRL 0x0E
#define LSM6DSO_WHO_AM_I 0x0F
#define LSM6DSO_CTRL1_XL 0x10
//bit[7:4]
typedef enum {
ODR_XL_OFF = (0<<4),
ODR_XL_1Hz6_LOW_POWER_ONLY = (11<<4),
ODR_XL_12Hz5 = (1<<4),
ODR_XL_26Hz = (2<<4),
ODR_XL_52Hz = (3<<4),
ODR_XL_104Hz = (4<<4),
ODR_XL_208Hz = (5<<4),
ODR_XL_416Hz = (6<<4),
ODR_XL_833Hz = (7<<4),
ODR_XL_1k66Hz = (8<<4),
ODR_XL_3k33Hz = (9<<4),
ODR_XL_6k66Hz = (10<<4),
} lsm6dso_odr_xl_t;
//bit[3:2]
typedef enum {
FS_XL_2g = (0<<2),
FS_XL_4g = (2<<2),
FS_XL_8g = (3<<2),
FS_XL_16g_SPIT_OIS_IU_FS = (1<<2), /* check XL_FS_MODE = ‘0’ in CTRL8_XL (17h) */
} lsm6dso_fs_xl_t;
#define ACC_LSB_2G_PER 0.061
#define ACC_LSB_4G_PER 0.122
#define ACC_LSB_8G_PER 0.244
#define ACC_LSB_16G_PER 0.488
#define LSM6DSO_CTRL2_G 0x11
//bit[7:4]
typedef enum {
ODR_G_OFF = (0<<4),
ODR_G_12Hz5 = (1<<4),
ODR_G_26Hz = (2<<4),
ODR_G_52Hz = (3<<4),
ODR_G_104Hz = (4<<4),
ODR_G_208Hz = (5<<4),
ODR_G_416Hz = (6<<4),
ODR_G_833Hz = (7<<4),
ODR_G_1k66Hz = (8<<4),
ODR_G_3k33Hz = (9<<4),
ODR_G_6k66Hz = (10<<4),
ODR_G_NOT_AVAILABLE = (11<<4),
} lsm6dso_odr_g_t;
//bit[3:2]
typedef enum {
FS_G_250 = (0<<2),
FS_G_500 = (1<<2),
FS_G_1000 = (2<<2),
FS_G_2000 = (3<<2),
} lsm6dso_fs_g_t;
#define GYR_LSB_250_PER 8.75
#define GYR_LSB_500_PER 17.50
#define GYR_LSB_1000_PER 35.0
#define GYR_LSB_2000_PER 70.0
#define LSM6DSO_CTRL3_C 0x12
#define LSM6DSO_CTRL4_C 0x13
#define LSM6DSO_CTRL5_C 0x14
#define LSM6DSO_CTRL6_C 0x15
#define LSM6DSO_CTRL7_G 0x16
#define LSM6DSO_CTRL8_XL 0x17
#define LSM6DSO_CTRL9_XL 0x18
#define LSM6DSO_CTRL10_C 0x19
#define LSM6DSO_ALL_INT_SRC 0x1A
#define LSM6DSO_WAKE_UP_SRC 0x1B
#define LSM6DSO_TAP_SRC 0x1C
#define LSM6DSO_D6D_SRC 0x1D
#define LSM6DSO_STATUS_REG 0x1E
#define TEM_DATA_AVAILABLE (1<<2)
#define GYR_DATA_AVAILABLE (1<<1)
#define ACC_DATA_AVAILABLE (1<<0)
#define LSM6DSO_OUT_TEMP_L 0x20
#define LSM6DSO_OUT_TEMP_H 0x21
#define TEMP_LSB_PER_DEG 256.0
#define TEMP_OFFSET_DEG 25
#define LSM6DSO_OUTX_L_G 0x22
#define LSM6DSO_OUTX_H_G 0x23
#define LSM6DSO_OUTY_L_G 0x24
#define LSM6DSO_OUTY_H_G 0x25
#define LSM6DSO_OUTZ_L_G 0x26
#define LSM6DSO_OUTZ_H_G 0x27
#define LSM6DSO_OUTX_L_A 0x28
#define LSM6DSO_OUTX_H_A 0x29
#define LSM6DSO_OUTY_L_A 0x2A
#define LSM6DSO_OUTY_H_A 0x2B
#define LSM6DSO_OUTZ_L_A 0x2C
#define LSM6DSO_OUTZ_H_A 0x2D
-
LSM6DSR和LSM6DSO区别有多大?2024-03-11 658
-
LSM6DSO的应用笔记2023-09-13 1364
-
LSM6DSO iNEMO六轴惯性传感器模块相关的使用信息和应用提示2023-09-06 638
-
SPI的LSM6DSO问题如何处理?2023-02-09 882
-
如何轻松进行lsm6dso和lsm6dsox软件检测?2023-02-03 677
-
MEMS LSM6DSD/LSM6DS3/LSM6DSO是否比LSM6DSR具有更好的“抗冲击性”?2023-02-02 1240
-
如何配置LSM6DSO并将其同步到树莓派?2023-01-12 592
-
LSM6DSO计步器如何设置?2023-01-09 702
-
我想知道lsm6dso传感器在什么情况下会重置呢?2023-01-05 530
-
LSM6DSO中的ID无法检测到自由落体示例代码是什么原因呢2022-12-19 624
-
工程师笔记|NUCLEO-G474RE 开发板扩展 LSM6DSO 实现 Data Fusion 演示2022-11-27 3166
-
LSM6DSO32TR STMicroelectronics LSM6DSO32i NEMO 惯性模块2020-10-28 1321
-
LSM6DS3_六轴传感器2016-02-19 2832
-
线性NTC温度传感器使用指南2010-01-14 2968
全部0条评论

快来发表一下你的评论吧 !
