

无人机数据链抗干扰技术发展综述
电子说
描述
无人机数据链承担着无人机指挥控制和信息传输的重要任务,是无人机系统的重要组成部分。近年来,无人机在军事和民用领域的广泛应用对无人机数据链在复杂环境下的安全性、可靠性和适应性提出了更高的要求。本文阐述了军用和民用领域无人机数据链的发展现状,总结了无人机数据链面临的挑战以及无人机数据链抗干扰的关键技术。
1、无人机数据链的发展历程
由于在无人机早期发展过程中军用无人机占据了主导地位,导致了不同国家、不同无人机平台上使用的数据链类型各异,并且随着无人机的发展,无人机数据链在使用的频带、调制方式上也进行了数次重要的改变。
1.1 视距数据链和超视距数据链
从无人机与指挥控制站之间的距离是否通视来分类,无人机数据链主要分为视距链路(RF-LOS)和超视距链路(BLOS)。
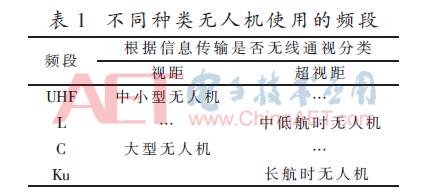
在视距链路类型中,不同的数据链使用了从低频到C波段之间的不同频率。而C波段(4 GHz~8GHz)因不易受到极端天气的影响从而成为目前大多数无人机数据链采用的频段,其中下行链路使用3.7~4.2GHz,上行链路使用5.9~6.4GHz。根据公开的文献资料显示,视距链路使用C波段的有水手无人机(Mariner)、捕食者无人机(Predator)和牵牛星无人机(Altair)等大型无人机。而一些小型无人机的视距链路则使用UHF波段(300~1000MHz),比如扫描鹰无人机(ScanEagle)、地球漫游者无人机(Georanger)、子午线无人机(Meridian)、阴影无人机(Shadow)和大乌鸦无人机(Raven)。
在超视距链路类型中,数据链使用的频段包括UHF波段、L波段(950~1450MHz)和Ku波段(12MHz~18GHz)。以全球鹰无人机(Global Hawk)、广域海上监视无人机(BAMS)和捕食者无人机(Predator)为代表的长航时无人机使用Ku波段作为超视距链路,其中上行链路为11.7~12.7GHz,下行链路为14~14.5GHz。而中低航时的无人机的超视距链路一般使用L波段的卫星通信链路。
不同无人机平台视距链路和超视距链路使用的频段总结如表1所示。
1.2 单载波数据链和多载波数据链
从数据链使用的调制方式来分,无人机数据链分为单载波传输数据链和多载波传输数据链。
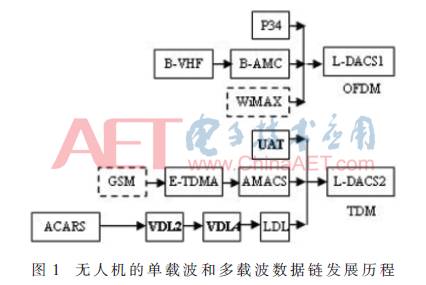
单载波传输数据链的发展过程中最早出现的数据链系统是由美国航空无线电公司(ARINC)于1978年发展出来的通信寻址与报告系统(ACARS)。ACARS最早并至今仍用于有人驾驶飞行器与地面控制站的通信中,后来被应用于无人机数据链系统。ACARS使用了幅度调制的模拟无线电信号并工作在高频(HF)、甚高频(VHF)和卫星通信(SATCOM)频段。在20个世纪90年代,ACARS数据链系统应用了数字无线电并被称为甚高频数字链路(VDL)。VDL依次发展出了VDL1、VDL2、VDL3、VDL4四个版本,其中VDL1和VDL3并没有投入实际使用,而VDL2用于飞行器和地面控制站之前的通信,而VDL4可以用于飞行器与飞行器之间的通信。由于VHF波段比较拥挤,所以基于VDL2和VDL4,工作在L波段的LDL2和LDL4在后来被学者提出。
1998年,休斯网络系统公司基于全球移动通信系统(GSM)发展了一种扩展时分多址(E-TDMA)数据链系统。这个数据链系统的关键技术是使用专用和请求式时隙的多个服务质量等级的应用,而这一关键技术被应用于采用时分复用(TDD)技术的通用多信道航空通信系统(AMACS)和由欧洲空域航行安全组织(EUROCONTROL)提出的基于L波段的1型数字航空系统(L-DACS1)。
第三个单载波传输数据链系统是于2002年提出的通用接入收发系统(UAT),UAT工作在978MHz频段并使用一个3MHz的信道提供峰值速率为1MHz的服务。UAT同样是一个TDMA系统。
第一个多载波传输数据链系统是由欧洲第六框架工作组(EP6)提出的宽带甚高频(B-VHF)系统,该系统工作在118~137MHz的甚高频频段并使用多载波码分多址(MC-CDMA)、TDD和正交频分多路复用(OFDM)技术,其中每个子载波的间隔是2 kHz。因为VHF频段比较拥挤,所以学者基于B-VHF发展了工作于L波段的宽带航空多载波(B-AMC)系统,B-AMC摒弃了CDMA技术而保留了OFDM技术,而考虑工作频率的增加使多普勒频移的增加,每个子载波的间隔扩展为10 kHz,且考虑到系统容量,B-AMC使用了应用频分复用(FDD)技术的两个信道。
第二个多载波传输数据链是由电子工业协会(EIA)和通信工业协会(TIA)提出的用于公共安全无线电系统的P34。P34覆盖了187.5 km的扇形区域并应用了OFDM技术。
由EUROCONTROL提出的基于L波段的2型数字航空系统(L-DACS2)是以前两种多载波传输数据链系统所采用的技术和WiMAX为基础、应用OFDM技术的第三种多载波传输数据链。
文献[5]总结了用于无人机的单载波和多载波数据链的发展历程,如图1所示。
2、无人机数据链抗干扰面临的挑战
设计无人机数据链要比设计其他无线通信系统更为复杂,在抗干扰方面无人机面临的挑战有信息远距离传输带来的路径损耗、传播途径中的障碍物造成的衰落、无人机的高速运动带来的多普勒频移、复杂的频谱环境带来的干扰和阻塞。
2.1 链路远距离路径损耗
无人机数据链系统所面临的最严峻的挑战是信息长距离的传输,长距离的传输会给数据链系统的性能带来以下几方面的挑战:
(1)功率衰减和频谱效率的降低。IEEE802.11无线传输链路也就是俗称的WiFi只能覆盖100m范围,而后来发展的IEEE802.16也就是俗称的WiMAX在乡村地区可以覆盖3km而在城市地区可以覆盖1km,以上的覆盖范围同样适用于3GPP LTE。一般的航空数据链路要求覆盖360km的范围,所以使用这些传统的无线通信链路来实施长距离的测控和传输会造成严重的功率衰减和极低的频谱效率。文献[8]显示,WiMAX网络可以在0.9km的范围里实现3bps~5bps/Hz的频谱效率。对于远距离传输而言,频谱效率将会更低。
(2)传输延迟。信息远距离的传输还会造成严重的来回传输时间的延迟而使通信保护时隙大大增加。相比于WiMAX网络在5km范围内17μs的延迟最低要求,电磁波单向传输360km则需要1.2ms。
(3)此外,信息的长距离传输会增加系统误码率、减少接收机信噪比、增加数据包的丢失概率。
2.2 无人机平台的高速运动
无人机的高速运动可以给接收机带来多普勒频移,而多普勒频移的大小和运动速度成正比而和波长成反比。可以计算出L-DACS1在速率为600km/h以及工作频段为1164MHz时的多普勒频移为1213Hz,而WiMAX在速率为100km/h以及工作频段为2.5GHz时的多普勒频移为231.5Hz。因为电磁波频率和波长成反比,因此对于高速运动状态的无人机而言,工作频段越低多普勒频移越小,但是低频段的频谱资源又非常紧张,所以无人机的高速运动带来的多普勒频移对无人机数据链来说是一个很大的挑战。
2.3 链路中障碍物引起的衰落
无人机数据链应用的主要频段为微波(300MHz~3000GHz),因为微波链路有更高的可用带宽,但是微波频率高、波长很短,没有绕射功能。链路的这种特点会给通信造成以下挑战:
(1)阴影衰落。无人机数据链在通信过程中遇到的障碍物可以部分或者全部地阻挡信号的传输而造成严重的阴影衰落。
(2)多径衰落。从更小的尺度上,由于电磁波通过障碍物时的散射和反射而造成的接收机接收到来自不同路径的同一信号的不同副本的相位不同,由此造成无线信号多径衰落。由于无人机数据链在动态变化,副本间的相位差也在动态变化,所以无法使用传统静态无线通信中加入一个衰落开销的方式来消除多径衰落。
(3)此外,多径衰落会造成严重的码间干扰。
2.4 人为非恶意干扰和恶意干扰
非恶意干扰是指频谱环境中存在的其他设备的无线电信号对无人机数据链产生的干扰,而恶意干扰主要存在于军用领域中,主要分压制式干扰和欺骗式干扰。
(1)压制式干扰是指干扰机持续发射的干扰信号功率大于无人机数据链的信号功率,使数据链中的通信节点不能正确接收射频信号,导致通信链路中断的一种人为通信干扰。压制式干扰类型按干扰信号的形式通常可以分为三类:单频干扰、窄带干扰和宽带干扰。由于压制式干扰从功率上淹没期望信号,或者阻塞射频前端,因此其调制信息无关紧要。
(2)而欺骗式干扰采用跟无人机数据链信号结构相似的信号作为欺骗信号,因此可以不被察觉地诱导接收机捕获跟踪欺骗信号,从而达到降低其抗干扰性能的目的,并可采用与数据链信号近似的功率,避免因功率过大被检测出来以及降低干扰成本。实际应用中,如军事领域接收机常常面临高动态、弱信号、强干扰或信号遮挡等复杂多变的环境,这时接收机会失锁转而捕获欺骗信号或者跟踪中受到欺骗信号的影响增大从而整个系统受到影响。
2.5 拥挤的频谱环境
频谱资源紧缺,不可避免地受到外部干扰信号威胁。传统的无人机数据链使用HF、VHF频段和SATCOM频段,但是SATCOM频段不能保证每个数据传输阶段都可以使用,而HF和VHF变得越来越拥挤。在国内,根据工业和信息化部颁布的无人驾驶航空器频率使用要求,可使用频段:840.5~845MHz、1430~1444MHz和2408~2440MHz,频谱资源紧缺,不可避免地受到外部干扰信号威胁。
3、无人机数据链抗干扰的关键技术
无人机数据链面临的挑战要求无人机数据链具备以下能力:
(1)广泛的频谱管理、分配能力:可以在任意区域、任意时间对无人机动态分配可用的频谱资源。
(2)解决因信息长距离传输而造成的功率大规模衰减的能力。
(3)避开并避免非恶意干扰的能力。
(4)抵抗恶意干扰的能力。
本节总结了文献中无人机数据链在面临以上诸多挑战和需求时可用的抗干扰技术的研究。研究应用于无人机数据链的抗干扰技术主要分为三类:提高系统可靠性和有效性的相关技术、基于协作通信技术以及基于认知无线电的抗干扰技术。
3.1 提高通信可靠性和有效性的无人机数据链相关抗干扰技术
这些相关技术包括多输入多输出(MIMO)系统的性能评估[9-10],信息传输策略[11-12],以及蜂窝系统和其他无线通信系统的使用[13-14]。集中于物理层和链路层的技术研究重点有:
(1)低功耗MIMO系统的集成。
(2)以扩频和跳频技术为代表的抗干扰技术的研究和使用。
(3)有限频谱资源限制下,高吞吐量、高可靠性的物理层和MAC层协议和策略。
(4)无人机数据链系统和卫星通信系统以及其他无线通信系统的整合。
3.2 基于协作通信的无人机数据链抗干扰技术
文献[15]提出了多信源条件下的协作通信方式,仿真结果表明该方案减小了接收信号的误码率;在动态传输速率条件下,该方案的传输可靠性更高。多信源协同通信的研究为UAV数据链的多链路协同信息传输指明了方向。文献[15]、[16]在协同通信的基础上提出了异步协同信息传输的方式,分别从物理层(构建三维空间的异步协作传输模式)和链路层(通过多链路协同转发协议)来增强信息传输的可靠性。前者在物理层充分利用三种空间分集技术,提高了分集增益,使抗干扰能力有了大幅度的提升;后者在链路层通过单发多收和基于随机同步竞争窗的自举应答算法来消除链路短时变化的影响,获得了更佳的网络抵达率和能量效率,增强了传输可靠性,提高了抗干扰能力。文献[17]提出了一种在因接收机和发射机相对运动或者环境变化较快时产生的过时信道状态信息下协作通信中继选择方法,选择最优的中继可以在一定程度上抵抗对协作通信系统的干扰。文献[18]提出了一种基于MAP准则的信道状态信息预测技术来提升协作通信系统的抗干扰能力。
3.3 基于认知无线电的无人机数据链抗干扰技术
另外,为了解决频谱资源短缺和随着无人机广泛使用用户频谱管理难度增加的问题,应用于无人机频谱感知和系统重构的认知无线电技术被研究。文献[19]针对无人机数据链在地理环境、气象环境、电磁环境等构成的复杂环境中受干扰程度提出一种结合支持向量机与功率准则的预测评估方法,预测的结果可用于无人机数据链的重构。文献[4]提出了一种基于认知无线电技术的无人机数据链通信系统,作者设计了一个认知引擎,将信噪比、信道估计结果、频谱感知结果、多普勒频移等作为输入,通过设计的认知引擎,输出无人机系统重构后的通信参数以及由输入判断系统遭遇的情况种类。文献[20]分析当前无人机数据链面临问题的基础上,提出了基于认知无线电的无人机智能数据链的概念及其内涵,描述了无人机智能数据链的工作过程,给出了无人机智能数据链的指标体系以及功能分级。在确定无人机数据链功能的基础上,提出了无人机智能数据链的体系结构。文献[21]提出了一种基于状态机的无人机数据链多参数规划方法,该方法为无人机数据链重构提供了一种可行有效的思路。
4、结论
随着无人机在各领域越来越广泛的应用,无人机数据链面临着诸如频谱资源紧张、频谱环境复杂、容易受到环境干扰和人为干扰影响等挑战。传统的扩频通信无法满足无人机通信链路可靠性的要求,因此,需要更灵活、适应能力更强的抗干扰方法来提高无人机抗干扰能力,保证通信链路质量。目前,在物理层和链路层提高系统容量和鲁棒性的各种抗干扰技术,协作通信技术以及认知无线电技术被研究、并逐步应用于无人机数据链,利用感知频谱环境并进行系统重构的技术将是无人机数据链智能抗干扰的主要发展方向。
审核编辑 :李倩
-
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程2024-03-12 4937
-
复杂电磁环境下无人机通信抗干扰问题研究2015-08-26 7400
-
舰载无人机测控系统关键技术研究2019-07-18 2713
-
2015年无人机技术大盘点2020-05-11 3151
-
航模/无人机遥控的解决方案2020-07-03 3511
-
各类反无人机技术的优势2022-08-25 28026
-
反无人机技术的研发,无人机反制设备成为热门产品2022-09-08 28993
-
小型无人机数据链与自主飞控系统设计2009-06-04 1407
-
无人机无线电数据链自动测试系统方案设计2009-07-11 967
-
LDPC码在COFDM无人机数据链中的性能仿真2010-02-21 839
-
Nakagami衰落下无人机数据链抗干扰性能2017-01-07 1166
-
无人机数据链发展历程,抗干扰技术所面临的挑战2018-04-03 28421
-
无人机的四大关键系统是哪四大2019-06-21 6145
-
无人机四大系统是干什么的2019-07-08 8908
-
软件无线电技术在无人机数据链系统中的应用2021-05-31 1245
全部0条评论

快来发表一下你的评论吧 !
